一种自动分类垃圾桶
1.本实用新型涉及垃圾桶领域,具体是指一种自动分类垃圾桶。
背景技术:
2.随着社会的发展,人们的环保意识也越来越强,垃圾分类可以提高垃圾的资源价值和经济价值,力争物尽其用,还可以减少垃圾处理量和处理设备,降低处理成本,减少土地资源的消耗。但在垃圾分类推广过程中发现,并不是所有的用户都能够对垃圾进行正确分类,而错误的分类对于后续垃圾的回收也会造成较大的麻烦。
3.目前,现有的自动分类垃圾桶,如申请号为202110316325.0,名称为一种基于旋转反馈投递的智能分类垃圾桶的专利申请,其具有手动分类和自动分类两种工作模式,能够根据电阻屏反馈的垃圾位置信息来实时调整垃圾投递姿态,但其主体框架、投放模块、第一舵机、第二舵机之间的位置配合不够理想,无法实现用户从任意方位都可进行垃圾投放,且投放模块设于第一舵机与第二舵机的侧边,加大了投放模块静止时自重对于舵机输出端的损耗,缩短了舵机的使用寿命。
4.针对上述现有技术存在的问题设计一种自动分类垃圾桶是本实用新型研究的目的。
技术实现要素:
5.针对上述现有技术存在的问题,本实用新型提供一种自动分类垃圾桶,能够有效解决上述现有技术存在的问题。
6.本实用新型的技术方案是:
7.一种自动分类垃圾桶,包括:
8.主体框架,所述主体框架的顶部设有盖板,所述盖板上开设有投放口;
9.舵机云台,所述舵机云台的顶面开口且一侧面开口,所述舵机云台设于所述盖板的下方,且所述舵机云台的顶面开口与所述投放口相对应,所述舵机云台的上端面与所述主体框架和盖板间距设置;
10.摄像装置,所述摄像装置设于所述盖板的底面并与所述舵机云台的顶面开口相对应;
11.支撑柱,所述支撑柱的底部与所述主体框架的内底面固定设置,顶部延伸至所述舵机云台的下方;
12.舵机组件,所述舵机组件设于所述支撑柱的顶部,且所述舵机组件的旋转输出端与所述舵机云台联动设置,所述舵机组件带动所述舵机云台绕水平方向旋转和绕竖直方向旋转;
13.若干垃圾桶,若干所述垃圾桶分设在所述支撑柱的四周,且所述舵机云台绕水平方向旋转下摆后,所述舵机云台的侧面开口可朝向任一所述垃圾桶;
14.控制单元,所述控制单元分别与所述摄像装置和舵机组件通信连接。
15.进一步地,所述控制单元包括舵机控制模块和图像识别模块,所述摄像装置、图像识别模块、舵机控制模块、舵机组件依次通信连接。
16.进一步地,还包括设于所述盖板的顶面的控制面板,所述控制单元还包括触控识别模块,所述控制面板、触控识别模块、舵机控制模块、舵机组件依次通信连接。
17.进一步地,还包括设于所述盖板的顶面的传声装置,所述控制单元还包括语音识别模块,所述传声装置、语音识别模块、舵机控制模块、舵机组件依次通信连接。
18.进一步地,还包括云端,所述云端包括满载报警模块,所述主体框架侧部设有与若干所述垃圾桶的桶口相对应的若干红外传感装置,所述控制单元还包括数据传输模块,所述红外传感装置、数据传输模块、满载报警模块依次通信连接。
19.进一步地,还包括若干照明装置,所述主体框架的侧部设有若干横架,若干所述横架的水平高度大于若干所述垃圾桶的水平高度,若干所述照明装置分别设于若干所述横架靠近若干所述垃圾桶的一侧。
20.进一步地,所述舵机组件具体包括上舵机、下舵机,所述上舵机的两侧部的第一旋转输出端与所述舵机云台的底部联动设置,所述下舵机的顶部的第二旋转输出端与所述上舵机的底部联动设置,且所述下舵机与所述支撑柱的顶部固定设置,所述上舵机带动所述舵机云台绕水平方向旋转,所述下舵机带动所述上舵机和舵机云台绕竖直方向旋转。
21.因此,本实用新型提供以下的效果和/或优点:
22.本实用新型提供的自动分类垃圾桶,将投放口设于主体框架的顶部盖板上,舵机云台设于盖板下方并与投放口相对应,舵机组件设于舵机云台的底部,且舵机云台的下端设于支撑柱的顶部,而支撑柱的底部与主体框架的内底面固定设置。通过上述结构之间的配合,使得用户从任意方位都可以投放垃圾,且将舵机组件设于舵机云台的底部且下端与支撑柱连接,使舵机云台、舵机组件和支撑柱的重心位于同一轴线上,减小了当舵机云台静止时其自身重力对于舵机组件输出端的损耗,延长了舵机的使用寿命。
23.应当明白,本实用新型的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本实用新型的进一步的解释。
附图说明
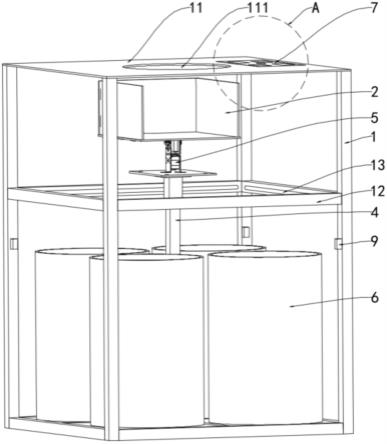
24.图1为本实用新型提供的一种自动分类垃圾桶的立体结构示意图。
25.图2为图1中a处的局部放大示意图。
26.图3为本实用新型提供的舵机组件的爆炸示意图。
27.图4为本实用新型提供的盖板和摄像装置的结构示意图。
28.图5为本实用新型提供的一种自动分类垃圾桶的模块连接示意图。
具体实施方式
29.为了便于本领域技术人员理解,现将实施例结合附图对本实用新型的结构作进一步详细描述:
30.参考图1-5,一种自动分类垃圾桶,包括:
31.主体框架1,所述主体框架1的顶部设有盖板11,所述盖板11上开设有投放口111;
32.舵机云台2,所述舵机云台2的顶面开口且一侧面开口,所述舵机云台2设于所述盖
板11的下方,且所述舵机云台2的顶面开口与所述投放口111相对应,所述舵机云台2的上端面与所述主体框架1和盖板2间距设置;本实施例中,所述舵机云台2由亚克力板制成,在其他实施例中,所述舵机云台2也可由其他类型的材质制成;
33.摄像装置3,所述摄像装置3设于所述盖板11的底面并与所述舵机云台2的顶面开口相对应;优选地,所述摄像装置设于所述盖板11底面靠近所述投放口111的位置,并与盖板11底面呈30
°
夹角,本实施例中,所述摄像装置3为openmv摄像头,openmv摄像头是一款小巧,低功耗,低成本的电路板,可以利用卷积神经网络算法对拍摄到的图像识别,通过io口向主控板传输数据,完成垃圾识别和信号传输,在其他实施例中,所述摄像装置3也可以设为其他类型的摄像头;
34.驱动系统,包括支撑柱4和舵机组件5,所述支撑柱4的底部与所述主体框架1的内底面固定设置,顶部延伸至所述舵机云台2的下方;为更好的进行支撑,所述支撑柱4的顶部形成平面型的支撑平台;所述舵机组件5设于所述支撑柱4的顶部,且所述舵机组件5的旋转输出端与所述舵机云台2联动设置,所述舵机组件5带动所述舵机云台2绕水平方向旋转和绕竖直方向旋转;具体地,本实施例中,所述舵机组件5具体包括上舵机51、下舵机52,所述上舵机51的两侧部的第一旋转输出端511通过第一u型架53与所述舵机云台2的底部螺接设置,所述上舵机51的两侧部的第一旋转输出端511带动所述第一u型架53绕水平方向旋转,进而带动所述舵机云台2绕水平方向旋转,所述下舵机52的顶部的第二旋转输出端521通过第二u型架54与所述上舵机51的底部螺接设置,且所述下舵机52通过第三u型架55与所述支撑柱4的顶部螺接设置,所述下舵机52的顶部的第二旋转输出端521带动所述第二u型架54绕竖直方向旋转,进而带动所述上舵机51和舵机云台2绕竖直方向旋转;
35.若干垃圾桶6,若干所述垃圾桶6分设在所述支撑柱4的四周,且所述舵机云台2绕水平方向旋转下摆后,所述舵机云台2的侧面开口可朝向任一所述垃圾桶6;本实施例中,垃圾桶的数量设有四个,用于存放不同类型的垃圾,优选地,分别设为干垃圾、湿垃圾、有害垃圾和可回收垃圾四类,在其他实施例中,垃圾桶的数量和类型可做适应性调整;
36.控制单元,所述控制单元分别与所述摄像装置3和舵机组件5通信连接。控制单元用于根据摄像装置3所拍摄到的图像识别用户所投放的垃圾的分类类型,进而控制舵机组件运动使所述舵机云台2旋转至对应类型的垃圾桶上方并倾倒垃圾。
37.通过上述结构之间的配合,使用户从任意方位都可以投放垃圾,且将舵机组件5设于舵机云台2的底部且下端与支撑柱4连接,使舵机云台2、舵机组件5和支撑柱4的重心位于同一轴线上,减小了当舵机云台2静止时其自身重力对于舵机组件5输出端的损耗,延长了舵机组件5的使用寿命。同时,上述结构通过控制单元与摄像装置3的配合,根据摄像装置3拍摄到的图像识别垃圾的分类类型后,控制舵机组件旋转输出端的运动,进而带动舵机云台根据指令绕水平方向旋转和绕竖直方向旋转,将垃圾投入所识别的分类类型的垃圾桶上方,从而实现对垃圾进行自动分类投放,可以对垃圾进行智能分类,满足了不同类型的用户对于垃圾分类的需求,例如难以进行正确分类的年长或年幼的用户,提高了了垃圾分类的效率,降低了垃圾回收处理成本。
38.进一步地,所述控制单元包括舵机控制模块和图像识别模块,所述摄像装置3、图像识别模块、舵机控制模块、舵机组件5依次通信连接。所述图像识别模块用于识别所述摄像装置3拍摄的图像中垃圾的分类类型,所述舵机控制模块根据所述图像识别模块识别的
垃圾的分类类型,控制舵机组件5旋转输出端的运动,进而带动舵机云台2根据指令绕水平方向旋转和绕竖直方向旋转,将垃圾投入所识别的分类类型的垃圾桶上方,从而实现对垃圾进行自动控制分类投放。
39.为了提高自动分类垃圾桶的可靠性,还包括设于所述盖板11的顶面的控制面板7,所述控制单元还包括触控识别模块,所述控制面板7、触控识别模块、舵机控制模块、舵机组件5依次通信连接。所述触控识别模块用于识别所述控制面板7输入的垃圾的分类类型指令,所述舵机控制模块根据所述触控识别模块识别的垃圾的分类类型指令,控制舵机组件5旋转输出端的运动,进而带动舵机云台2根据指令绕水平方向旋转和绕竖直方向旋转,将垃圾投入所识别的分类类型的垃圾桶上方,从而实现对垃圾进行手动控制分类投放,避免在自动投放出现故障时导致无法对垃圾进行分类。本实施例中,所述控制面板7设为触摸屏,且触摸屏内设有四个按钮单元71,四个所述按钮单元分别用于输入干垃圾、湿垃圾、有害垃圾和可回收垃圾四类垃圾分类类型至触控识别模块,在其他实施例中,所述控制面板7上的控制按钮的数量可做适应性调整。
40.为了提高自动分类垃圾桶的可靠性,还包括设于所述盖板的顶面的传声装置8,所述控制单元还包括语音识别模块,所述传声装置8、语音识别模块、舵机控制模块、舵机组件5依次通信连接。所述语音识别模块用于识别所述传声装置8获取的相应语音指令,所述舵机控制模块根据所述语音指令控制舵机组件5旋转输出端的运动,进而带动舵机云台2根据指令绕水平方向旋转和绕竖直方向旋转,将垃圾投入所识别的分类类型的垃圾桶上方,从而实现对垃圾进行语音控制分类投放,避免在自动投放出现故障时导致无法对垃圾进行分类。本实施例中,所述传声装置8设于所述控制面板7上,在其他实施例中,所述传声装置8的位置可做适应性调整。
41.为了在自动分类垃圾桶数量较大时方便远程监控管理,同时管理多个垃圾桶,提高管理效率,还包括云端,所述云端包括满载报警模块,所述主体框架1侧部设有与若干所述垃圾桶6的桶口相对应的若干红外传感装置9,所述控制单元还包括数据传输模块,所述红外传感装置9、数据传输模块、满载报警模块依次通信连接。本实施例中,所述云端为阿里云,所述红外传感装置9的数量设为4个,所述红外传感装置9为红外传感器,红外传感器是利用红外线的物理性质来进行测量的传感器,所述数据传输模块用于将所述红外传感装置9的检测结果实时上传至满载报警模块,当所述红外传感装置9的检测结果为持续检测到物体时,所述满载报警模块报警,提示垃圾桶满载;在其他实施例中,所述红外传感装置9的数量可做适应性调整。
42.为了方便用户夜间使用自动分类垃圾桶,还包括若干照明装置13,所述主体框架1的侧部设有若干横架12,若干所述横架12的水平高度大于若干所述垃圾桶6的水平高度,若干所述照明装置13分别设于若干所述横架12的靠近若干所述垃圾桶6的一侧。本实施例中,所述照明装置13为led照明灯,且分别设于若干所述横架的内侧,在其他实施例中,所述照明装置的类型和位置可做适应性调整。
43.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1