一种十字刀自动拆包机的制作方法
1.本实用新型涉及一种十字刀自动拆包机。
背景技术:
2.目前市场上使用最广泛的小型自动拆包机基本上都是从送袋-抓袋-升袋-袋行走-落袋-破袋-袋料分离-各进不同的通道的全自动过程,并配有负压真空脉冲除尘装置,保证全过程无粉尘外逸。在破袋过程中,基本上都是采用在一根轴上平行安装若干片刀片,当料袋水平移动经过时,料袋下端被割开若干道平行的划缝,通过后续的抖袋机构运行,料从几道划缝中泄出,这样的划缝张开后裂口面积有限,所以泄料时间长,泄料不彻底,袋内死角部分会有残余料,从而导致用户的原料成本上升,即使在后续工艺进行残料收集,也会增加人工成本,并且在对残料进行人工收集时,粉尘外逸,对环境以及操作人员的劳动安全都会有一定的损害。
技术实现要素:
3.本实用新型针对现有技术所存在的技术问题,提供了一种十字刀自动拆包机,其破袋效果好,能够减少甚至消除物料损耗,卸料周期短,可有效提高产能,同时能够避免不必要的环境污染,安全性更高。
4.为达到上述目的,本实用新型采用的技术方案是:
5.一种十字刀自动拆包机,包括机架、输送机、升降机构、行走架驱动系统、夹爪抓袋机构、横向破袋机构、落料仓、纵向破袋机构、行走架和螺旋输送机,所述输送机的尾端顺序连接所述机架内的接料板,所述接料板倾斜设置,所述纵向破袋机构设置于所述接料板的表面,所述机架的顶部设置有行走轨道,所述行走架架设在所述机架的顶部并且与所述行走轨道滑动配合,在所述行走架驱动系统的带动下所述行走架沿所述行走轨道平移行走,所述升降机构固定在所述行走架上,所述升降机构的下部伸缩端固定连接所述夹爪抓袋机构,所述横向破袋机构设置于接料板的外侧且沿着所述行走架的运动方向设置于接料板的后端,在所述接料板的后端还设置有承接空袋用的网格栅,所述落料仓设置于所述机架的底部,所述落料仓的进料开口位于所述网格栅及横向破袋机构的下方,所述螺旋输送机的接料口位于所述接料板的下方且螺旋输送机的尾端通入所述落料仓,其中,所述纵向破袋机构的刀片轴与横向破袋机构的刀片轴呈垂直布置方式。
6.对于上述技术方案,申请人还有进一步的优化措施。
7.可选地,所述升降机构包括伸缩电机、伸缩架以及水平框架,所述伸缩电机固定在所述行走架上,所述伸缩电机的伸缩轴的端部固定连接所述水平框架,所述伸缩架设置于所述行走架与所述水平框架之间,所述伸缩架的一端固定连接所述行走架,另一端固定连接所述水平框架。
8.可选地,所述夹爪抓袋机构包括固定框架、连接架、两个夹持气缸以及两块活动夹板,所述固定框架平行于所述接料板的表面,所述连接架固定连接所述水平框架与所述固
定框架,两夹持气缸固定在所述固定框架内,所述夹持气缸的动力轴通过连杆机构连接两块活动夹板,夹持气缸带动所述活动夹板相对旋转,通过相对设置的两块活动夹板间的运动夹持或者释放所述料袋。
9.进一步地,还包括抖袋机构,所述抖袋机构固定在所述升降机构的水平框架上,所述抖袋机构的伸缩端固定连接所述夹爪抓袋机构的固定框架。
10.进一步地,还包括翻转机构和袋回收机构,所述翻转机构固定在所述机架内,所述袋回收机构设置于机架的仓体底部,所述翻转机构连接所述网格栅并带动所述网格栅向所述袋回收机构处翻转。
11.更进一步地,还包括除尘系统和防尘罩壳,所述防尘罩壳设置于所述机架的顶部并且与所述机架的内部仓体相连通,所述除尘系统连通所述防尘罩壳并对仓内进行除尘处理。
12.由于上述技术方案运用,本实用新型与现有技术相比具有下列优点:
13.本实用新型的十字刀自动拆包机,其结构简单,制造成本地,而且十字形割刀结构的设置能够使得破袋完全,物料能够自然倾斜,卸料彻底、无残留,减少和消除了物料损耗,而且泄料时间周期缩短,有效提高了产能,无需再增加后续的人工收集残料工艺,降低了用工人数,节约人工成本,除此之外,由于无需再增加后续人工收集残料工艺,避免了人工收集残料时粉尘外逸对环境造成污染,具有一定的环保性。
附图说明
14.后文将参照附图以示例性而非限制性的方式详细描述本实用新型的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
15.图1是根据本实用新型一个实施例的十字刀自动拆包机的整体结构示意图;
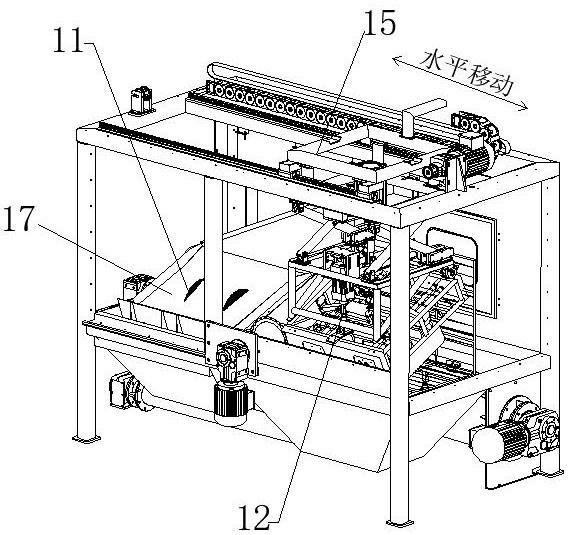
16.图2是根据本实用新型一个实施例的十字刀自动拆包机的内部结构示意图,其中,行走架位于接料板的上方;
17.图3是根据本实用新型一个实施例的十字刀自动拆包机的内部结构示意图,其中,行走架位于落料仓及隔离栅的上方;
18.图4是根据本实用新型一个实施例的十字刀自动拆包机的内部结构示意图,其中,行走架位于接料板的上方。
19.其中,附图标记说明如下:
20.1、除尘系统;
21.2、防尘罩壳;
22.3、plc系统;
23.4、机架;
24.5、输送机;
25.6、升降机构,61、伸缩电机,62、伸缩架,63水平框架;
26.7、行走架驱动系统;
27.8、夹爪抓袋机构,81、固定框架,82、连接架,83、夹持气缸,84、活动夹板;
28.9、横向破袋机构;
29.10、落料仓;
30.11、纵向破袋机构;
31.12、抖袋机构;
32.13、翻转机构;
33.14、袋回收机构;
34.15、行走架;
35.16、螺旋输送机;
36.17、接料板;
37.18、行走轨道;
38.19、网格栅。
具体实施方式
39.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
40.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
41.本实施例描述了一种十字刀自动拆包机,如图1至4所示,包括机架4、输送机5、升降机构6、行走架驱动系统7、夹爪抓袋机构8、横向破袋机构9、落料仓10、纵向破袋机构11、行走架15和螺旋输送机16,所述输送机5的尾端顺序连接所述机架4内的接料板17,所述接料板17倾斜设置,所述纵向破袋机构11设置于所述接料板17的表面,所述机架4的顶部设置有行走轨道18,所述行走架15架设在所述机架4的顶部并且与所述行走轨道18滑动配合,在所述行走架驱动系统7的带动下所述行走架15沿所述行走轨道18平移行走,所述升降机构6固定在所述行走架15上,所述升降机构6的下部伸缩端固定连接所述夹爪抓袋机构8,所述横向破袋机构9设置于接料板17的外侧且沿着所述行走架15的运动方向设置于接料板17的后端,在所述接料板17的后端还设置有承接空袋用的网格栅19,所述落料仓10设置于所述机架4的底部,所述落料仓10的进料开口位于所述网格栅19及横向破袋机构9的下方,所述螺旋输送机16的接料口位于所述接料板17的下方且螺旋输送机16的尾端通入所述落料仓10,其中,所述纵向破袋机构11的刀片轴与横向破袋机构9的刀片轴呈垂直布置方式。
42.所述行走架驱动系统7由变频电机、同步轮和同步带组成,行走架15与同步带固定连接,两个同步轮固定在机架4上,变频电机驱动动其中一只主动同步轮转动,带动同步带与从动轮一起转动,从而驱使行走架15进行水平运动,通过变频电机的正反转实现行走架15的水平往复运动。
43.所述升降机构6包括伸缩电机61、伸缩架62以及水平框架63,所述伸缩电机61固定在所述行走架15上,所述伸缩电机61的伸缩轴的端部固定连接所述水平框架63,所述伸缩架62设置于所述行走架15与所述水平框架63之间,所述伸缩架62的一端固定连接所述行走架15,另一端固定连接所述水平框架63。
44.所述夹爪抓袋机构8包括固定框架81、连接架82、两个夹持气缸83以及两块活动夹
板84,所述固定框架81平行于所述接料板17的表面,所述连接架82固定连接所述水平框架63与所述固定框架81,两夹持气缸83固定在所述固定框架81内,所述夹持气缸83的动力轴通过连杆机构连接两块活动夹板84,夹持气缸83带动所述活动夹板84相对旋转,通过相对设置的两块活动夹板84间的运动夹持或者释放所述料袋。
45.本实施例的拆包机还包括抖袋机构12,所述抖袋机构12固定在所述升降机构6的水平框架63上,所述抖袋机构12的伸缩端固定连接所述夹爪抓袋机构8的固定框架81。
46.为了能够对于倾倒物料后的空袋予以自动化回收,本实施例的拆包机还包括翻转机构13和袋回收机构14,所述翻转机构13固定在所述机架4内,所述袋回收机构14设置于机架4的仓体底部,所述翻转机构13连接所述网格栅19并带动所述网格栅19向所述袋回收机构14处翻转。
47.为了提高环保型,本实施例的十字刀自动拆包机中还包括除尘系统1和防尘罩壳2,所述防尘罩壳2设置于所述机架4的顶部并且与所述机架4的内部仓体相连通,所述除尘系统1连通所述防尘罩壳2并对仓内进行除尘处理。
48.本实施例的十字刀自动拆包机的工作流程是:把料袋放在输送机5上,输送机5启动,将料袋输送至输送机5端头并向下滑落至夹爪抓袋机构8下方,在滑落过程中,如图2和4所示,料袋下端被固定安装在机架4上的纵向破袋机构11上的旋转刀片划开两至三条长裂缝,料袋滑落到指定位置后,传感器感应并将信号传输至plc系统3,由plc系统3控制夹爪抓袋机构8执行抓袋动作命令,夹爪抓袋机构8将料袋抓紧后,固定安装在在行走架15上的升降机构6开始执行升起动作,将料袋抓离升起,接着行走架驱动系统7启动,安装在行走架15上的升降机构6和固定在其架子上的夹爪抓袋机构8裹挟着料袋一起沿着导轨进行水平移动,此时会从料袋的裂缝中泄漏出少部分物料,这部分物料落入下端的螺旋输送机16内,送入落料仓10,在水平移动的过程中,固定在机架4上的横向破袋机构9的旋转刀片将料袋下端划开一条长裂缝,该裂缝与之前纵向破袋机构11划开的裂缝相互垂直,形成十字切割,料袋下端会自然形成一个大的长宽缺口,料从缺口中自然倾泄而出落入下方的落料仓10内,同时固定安装在升降机构6架子上的抖袋机构12开始进行往复伸缩动作,如图3所示,将料袋内死角部分的残余物料抖落干净落入落料仓10,夹爪抓袋机构8开始松袋动作,袋子落在翻转机构13的网格栅上,此时行走架驱动系统7工作,带着行走架15水平移动回到起始工作位置,准备进行下一轮抓袋工作,翻转机构13上的气缸进行动作,驱动网格栅翻转90
°
,网格栅上的空料袋垂直落入袋回收机构14,袋回收机构14启动,通过无轴螺旋的旋转将空料袋送出,由后续工艺进行处理。整个装置在运行时,封闭在防尘罩壳2内的含细微粉尘空气被除尘系统1收集过滤, 除尘系统1为负压真空脉冲形式,确保粉尘不会从设备其它出口溢出。整个流程全由plc系统3进行自动控制,全程无人化操作。
49.综上可知,本技术的十字刀自动拆包机,其结构简单,制造成本地,而且十字形割刀结构的设置能够使得破袋完全,物料能够自然倾斜,卸料彻底、无残留,减少和消除了物料损耗,而且泄料时间周期缩短,有效提高了产能,无需再增加后续的人工收集残料工艺,降低了用工人数,节约人工成本,除此之外,由于无需再增加后续人工收集残料工艺,避免了人工收集残料时粉尘外逸对环境造成污染,具有一定的环保性。
50.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围,
凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1