一种高精度码垛机器人的制作方法
一种高精度码垛机器人
【技术领域】
1.本实用新型涉及机械的技术领域,特别是码垛机器人的技术领域。
背景技术:
2.有些物品需要进行码垛才能够进行存放,为了方便的进行码垛,需要使用到码垛机器人。现有的码垛机器人在码垛时难免会产生偏斜,当码垛高度较高时容易倾倒,会带来一定的安全隐患。
技术实现要素:
3.本实用新型的目的就是解决现有技术中的问题,提出一种高精度码垛机器人,能够使码垛后的物品不易倾倒,码垛位置准确,具有较高的精度。
4.为实现上述目的,本实用新型提出了一种高精度码垛机器人,包括第一传送机构、第二传送机构、第三传送机构、移物机械手、托盘、整理机构、控制装置,所述第一传送机构、第二传送机构、第三传送机构自左向右依次排列,第一传送机构、第二传送机构、第三传送机构均自左向右传送物品,第三传送机构低于第一传送机构,第二传送机构上放置有一个托盘,第二传送机构安装在一个安装架上,安装架与一个升降装置相连,所述移物机械手位于第一传送机构和第二传送机构的上方,移物机械手用于将第一传送机构上的物品移动到托盘上,所述第二传送机构的上方设有一个整理机构,整理机构由第一推板、整形框、第二推板组成,所述第一推板竖直设置且位于第二传送机构的前侧,第一推板第一推板的前侧与一个第一气缸相连,第一气缸带动第一推板前后移动,所述整形框为一个水平放置的u形框体,整形框的开口朝向第一推板,整形框的后侧与一个第二气缸相连,第二气缸带动整形框前后移动,所述整形框的左右内侧壁上均设有一个第三气缸,第三气缸的末端连有竖直设置的第二推板,第三气缸带动第二推板左右移动,所述第一传送机构、第二传送机构、第三传送机构、移物机械手、第一气缸、第二气缸、第三气缸均由控制装置所控制。
5.作为优选,所述第一传送机构上方设有一块竖直设置的挡板,挡板与第一传送机构的传送方向垂直,挡板的左侧设有至少一个压力感应装置,压力感应装置由控制装置所控制。
6.作为优选,所述整形框的后侧内壁上设有一个第四气缸,第四气缸的末端连有竖直设置的第三推杆,第四腔带动第三推板前后移动,第四气缸由控制装置所控制。
7.作为优选,所述第一推板和整形框分开的距离最大时第一推板和整形框的下投影均不在第二传送机构上。
8.作为优选,所述第二传送机构可移动至传送面与第一传送机构的传送面平齐,第二传送机构可移动至传送面与第三传送机构的传送面平齐。
9.本实用新型的有益效果:本实用新型通过将整理机构设置在第二传送机构的上方,使得码垛后的物品可以得到有效的整理,不易倾斜,保证了码垛的整齐和安全,保证了码垛最终位置的精度;升降装置的设置使得码垛高度不会受到第一传送机构高度的影响;
挡板的设置使得移物机械手可更好的移动物品,保证了码垛位置的精度。
10.本实用新型的特征及优点将通过实施例结合附图进行详细说明。
【附图说明】
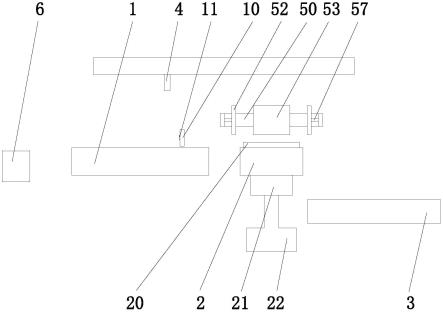
11.图1是本实用新型一种高精度码垛机器人的主视图;
12.图2是本实用新型一种高精度码垛机器人的整理机构示意图。
13.图中:1-第一传送机构、2-第二传送机构、3-第三传送机构、4-移物机械手、6-控制装置、10-挡板、11-压力感应装置、20-托盘、21-安装架、22-升降装置、50-整形框、51-第一推板、52-第二推板、53-第三推板、55-第一气缸、56-第二气缸、57-第三气缸、58-第四气缸。
【具体实施方式】
14.参阅图1、图2,本实用新型一种高精度码垛机器人,包括第一传送机构1、第二传送机构2、第三传送机构3、移物机械手4、托盘20、整理机构、控制装置6,所述第一传送机构1、第二传送机构2、第三传送机构3自左向右依次排列,第一传送机构1、第二传送机构2、第三传送机构3均自左向右传送物品,第三传送机构3低于第一传送机构1,第二传送机构2上放置有一个托盘20,第二传送机构2安装在一个安装架21上,安装架21与一个升降装置22相连,所述移物机械手4位于第一传送机构1和第二传送机构2的上方,移物机械手4用于将第一传送机构1上的物品移动到托盘20上,所述第二传送机构2的上方设有一个整理机构,整理机构由第一推板51、整形框50、第二推板52组成,所述第一推板51竖直设置且位于第二传送机构2的前侧,第一推板51第一推板51的前侧与一个第一气缸55相连,第一气缸55带动第一推板51前后移动,所述整形框50为一个水平放置的u形框体,整形框50的开口朝向第一推板51,整形框50的后侧与一个第二气缸56相连,第二气缸56带动整形框50前后移动,所述整形框50的左右内侧壁上均设有一个第三气缸57,第三气缸57的末端连有竖直设置的第二推板52,第三气缸57带动第二推板52左右移动,所述第一传送机构1、第二传送机构2、第三传送机构3、移物机械手4、第一气缸55、第二气缸56、第三气缸57均由控制装置6所控制,所述第一传送机构1上方设有一块竖直设置的挡板10,挡板10与第一传送机构1的传送方向垂直,挡板10的左侧设有至少一个压力感应装置11,压力感应装置11由控制装置6所控制,所述整形框50的后侧内壁上设有一个第四气缸58,第四气缸58的末端连有竖直设置的第三推杆,第四腔带动第三推板53前后移动,第四气缸58由控制装置6所控制,所述第一推板51和整形框50分开的距离最大时第一推板51和整形框50的下投影均不在第二传送机构2上,所述第二传送机构2可移动至传送面与第一传送机构1的传送面平齐,第二传送机构2可移动至传送面与第三传送机构3的传送面平齐。
15.本实用新型工作过程:
16.本实用新型一种高精度码垛机器人在工作过程中,整理机构设置在第二传送机构2的上方,使得码垛后的物品可以得到有效的整理,不易倾斜,保证了码垛的整齐和安全,保证了码垛最终位置的精度;升降装置22的设置使得码垛高度不会受到第一传送机构1高度的影响;挡板10的设置使得移物机械手4可更好的移动物品,保证了码垛位置的精度。
17.上述实施例是对本实用新型的说明,不是对本实用新型的限定,任何对本实用新型简单变换后的方案均属于本实用新型的保护范围。
技术特征:
1.一种高精度码垛机器人,其特征在于:包括第一传送机构(1)、第二传送机构(2)、第三传送机构(3)、移物机械手(4)、托盘(20)、整理机构、控制装置(6),所述第一传送机构(1)、第二传送机构(2)、第三传送机构(3)自左向右依次排列,第一传送机构(1)、第二传送机构(2)、第三传送机构(3)均自左向右传送物品,第三传送机构(3)低于第一传送机构(1),第二传送机构(2)上放置有一个托盘(20),第二传送机构(2)安装在一个安装架(21)上,安装架(21)与一个升降装置(22)相连,所述移物机械手(4)位于第一传送机构(1)和第二传送机构(2)的上方,移物机械手(4)用于将第一传送机构(1)上的物品移动到托盘(20)上,所述第二传送机构(2)的上方设有一个整理机构,整理机构由第一推板(51)、整形框(50)、第二推板(52)组成,所述第一推板(51)竖直设置且位于第二传送机构(2)的前侧,第一推板(51)第一推板(51)的前侧与一个第一气缸(55)相连,第一气缸(55)带动第一推板(51)前后移动,所述整形框(50)为一个水平放置的u形框体,整形框(50)的开口朝向第一推板(51),整形框(50)的后侧与一个第二气缸(56)相连,第二气缸(56)带动整形框(50)前后移动,所述整形框(50)的左右内侧壁上均设有一个第三气缸(57),第三气缸(57)的末端连有竖直设置的第二推板(52),第三气缸(57)带动第二推板(52)左右移动,所述第一传送机构(1)、第二传送机构(2)、第三传送机构(3)、移物机械手(4)、第一气缸(55)、第二气缸(56)、第三气缸(57)均由控制装置(6)所控制。2.如权利要求1所述的一种高精度码垛机器人,其特征在于:所述第一传送机构(1)上方设有一块竖直设置的挡板(10),挡板(10)与第一传送机构(1)的传送方向垂直,挡板(10)的左侧设有至少一个压力感应装置(11),压力感应装置(11)由控制装置(6)所控制。3.如权利要求1所述的一种高精度码垛机器人,其特征在于:所述整形框(50)的后侧内壁上设有一个第四气缸(58),第四气缸(58)的末端连有竖直设置的第三推杆,第四腔带动第三推板(53)前后移动,第四气缸(58)由控制装置(6)所控制。4.如权利要求1所述的一种高精度码垛机器人,其特征在于:所述第一推板(51)和整形框(50)分开的距离最大时第一推板(51)和整形框(50)的下投影均不在第二传送机构(2)上。5.如权利要求1所述的一种高精度码垛机器人,其特征在于:所述第二传送机构(2)可移动至传送面与第一传送机构(1)的传送面平齐,第二传送机构(2)可移动至传送面与第三传送机构(3)的传送面平齐。
技术总结
本实用新型公开了一种高精度码垛机器人,包括第一传送机构、第二传送机构、第三传送机构、移物机械手、托盘、整理机构、控制装置,所述第一传送机构、第二传送机构、第三传送机构自左向右依次排列,第一传送机构、第二传送机构、第三传送机构均自左向右传送物品,第三传送机构低于第一传送机构,第二传送机构上放置有一个托盘,第二传送机构安装在一个安装架上,安装架与一个升降装置相连。本实用新型通过将整理机构设置在第二传送机构的上方,使得码垛后的物品可以得到有效的整理,不易倾斜,保证了码垛的整齐和安全,保证了码垛最终位置的精度。度。度。
技术研发人员:刘浩 倪乔波 马毅超 张艳
受保护的技术使用者:浙江启成智能科技有限公司
技术研发日:2022.07.20
技术公布日:2022/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1