摇臂式杯面投包机自动控制系统的制作方法
1.本实用新型涉及一种摇臂式杯面投包机自动控制系统,属于包装控制装置技术领域。
背景技术:
2.目前方便面生产厂家通常使用的是调料包自动投包机投放调料包。传统调料包投包机的工作原理是:投包机把连包的调料包切成单包,并通过输送装置把调料包输送到碗面包装线上方,然后配合碗面包装线的速度节拍,使调料包从输送线上自由落体落入碗内,传统碗面,碗口大,调料包小,调料包可以自由落体落入碗内。相比之下杯面的杯口小,调料包大,调料包的尺寸大于杯口直径,调料包无法通过自由落体落入杯内。因此对于方便面生产企业来说,生产杯面过程中,如何把大于杯口的调料包顺利投放入杯内,是本立项提出的课题难点所在。
技术实现要素:
3.针对现有技术存在的上述缺陷,本实用新型提出了一种摇臂式杯面投包机自动控制系统。
4.本实用新型所述的摇臂式杯面投包机自动控制系统,包括电机和摇摆机构,摇摆机构上安装有抓取杯面料包的吸附夹具,电机经过曲柄滑块机构与摇摆机构相连,曲柄滑块机构包括飞轮、曲柄、滑块和齿轮组,其中:
5.飞轮,与电机相连,在电机驱动下以恒定ω转速转动;
6.曲柄,其一端连接飞轮,另一端连接滑块;曲柄与滑块构成转动副;曲柄沿飞轮作轴向转动;
7.滑块,固定在机架上,滑块沿机架往复直线运动;
8.齿轮组,分别将滑块与摇摆机构相连;
9.摇摆机构,呈矩形框设置,其中一边为连接齿轮组的主动杆、相对的一边为从动杆,主动杆与从动杆之间设置有连接件,吸附夹具安装于从动杆上;
10.吸附夹具所在的从动杆绕主动杆作180
°
来回旋转运动。
11.优选地,所述吸附夹具回旋抓取料包,然后180
°
旋转至下方的杯面处,将料包放至杯面中。
12.优选地,所述吸附夹具与气缸相连,当气缸与料包接触时,气缸启动吸气保证吸附夹具抓取料包;当气缸位于杯面上方时,气缸停止吸气保证料包落入杯面中。
13.优选地,所述滑块前进所用的时间大于返回所用的时间,曲柄滑块机构具有急回特性,摇摆机构保证每分钟向杯面内投放360次料包。
14.本实用新型的有益效果是:因为杯面的杯口小于料包的尺寸,所以普通的投料装置已经不能满足使用要求,而摇臂机构上的气缸将料包吸附完后,摆动到杯面上方时,将料包压入杯面内再释放;这样保证了料包可以整齐的投放,更便于后工序对杯面进行封口;本
实用新型适用于杯面生产线每排放置8个杯面,每分钟走45个节拍,即:每分钟投放360包调料包,满足杯面生产线的速度要求,且料包投放的成功率(料包的投放成功率目标:≥99.5%,以最大限度的减少人工补包)。
附图说明
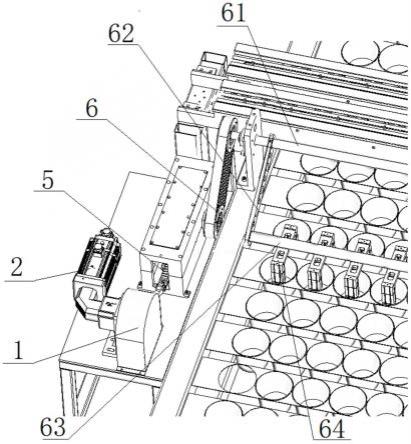
15.图1是本实用新型整体结构的立体图。
16.图2是曲柄滑块机构的结构示意图。
17.图3是摇摆机构的结构示意图。
18.图中:1、飞轮;2、电机;3、曲柄;4、机架;5、滑块;6、齿轮组;61、主动杆;62、连接件;63、从动杆;64、吸附夹具。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
20.实施例:
21.如图1所示,本实用新型所述的摇臂式杯面投包机自动控制系统,包括电机2和摇摆机构,摇摆机构上安装有抓取杯面料包的吸附夹具64,电机2经过曲柄3滑块5机构与摇摆机构相连,曲柄3滑块5机构包括飞轮1、曲柄3、滑块5和齿轮组6,其中:
22.飞轮1,与电机2相连,在电机2驱动下以恒定ω转速转动;
23.曲柄3,其一端连接飞轮1,另一端连接滑块5;曲柄3与滑块5构成转动副;曲柄3沿飞轮1作轴向转动;
24.滑块5,固定在机架4上,滑块5沿机架4往复直线运动;
25.齿轮组6,分别将滑块5与摇摆机构相连;
26.摇摆机构,呈矩形框设置,其中一边为连接齿轮组6的主动杆61、相对的一边为从动杆63,主动杆61与从动杆63之间设置有连接件62,吸附夹具64安装于从动杆63上;
27.吸附夹具64所在的从动杆63绕主动杆61作180
°
来回旋转运动。
28.优选地,所述吸附夹具64回旋抓取料包,然后180
°
旋转至下方的杯面处,将料包放至杯面中。
29.优选地,所述吸附夹具64与气缸相连,当气缸与料包接触时,气缸启动吸气保证吸附夹具64抓取料包;当气缸位于杯面上方时,气缸停止吸气保证料包落入杯面中。
30.优选地,所述滑块5前进所用的时间大于返回所用的时间,曲柄3滑块5机构具有急回特性,摇摆机构保证每分钟向杯面内投放360次料包。
31.因为杯面的杯口小于料包的尺寸,所以普通的投料装置已经不能满足使用要求,而摇臂机构上的气缸将料包吸附完后,摆动到杯面上方时,将料包压入杯面内再释放;这样保证了料包可以整齐的投放,更便于后工序对杯面进行封口;本实用新型适用于杯面生产线每排放置8个杯面,每分钟走45个节拍,即:每分钟投放360包调料包,满足杯面生产线的速度要求,且料包投放的成功率(料包的投放成功率目标:≥99.5%,以最大限度的减少人工补包)。
32.摇臂机构的动力部分采用了曲柄3滑块5机构,曲柄3滑块5机构是指用曲柄3和滑
块5来实现转动、移动相互转换的平面连杆机构。曲柄3滑块5机构中与机架4构成移动副的构件为滑块5,通过转动副联接曲柄3和滑块5的构件为连杆。如图2所示,电机2提供动力,带动飞轮1(曲柄3)做周向转动,通过连杆,滑块5(滑块5)做往复直线运动。
33.滑块5往复运动的方向没有经过飞轮1的中心,滑块5往返运动的过程中的两个极限位置之间存在极位夹角θ,当飞轮1以恒定ω转动时,滑块5往所用的时间大于返所用的时间,所以此机构具有急回特性。
34.如图3所示,摇臂机构的摇摆部分采用了平行四边形机构,这种机构的特点之一是相对杆始终保持平行﹐且两连杆的角位移﹑角速度和角加速度也始终相等,即两对面杆具有相同运动规律的特点。主动杆61转动时,带动杆转动,同时通过齿轮传动带动从动杆63作同向同速运动,而连接杆做平移运动,保证四杆在运动过程中始终保持平行四边形状态。此机构有较小的主、从动杆63距。当转速较高时,应注意平衡。
35.为了保证摇臂机构传动部分稳定运行采用纯齿轮组6传动。在主动齿轮和从动齿轮之间添加一个过渡齿轮,替换掉同步带,从而避免了在拐点处出现卡顿的情况。在生产线运行的过程中,如若出现特殊情况,应优先保护生产线的完整。例如,当感应识别系统出现故障时,在料包投放时,生产线上的杯面就进行了移动,在水平外力达到一定程度时,摇臂装置的气缸部分要顺应力的方向,进行倾斜,立即报警并停止运行,以此保护生产线的完整。摇臂机构的吸附夹具64要准确无误的完成料包的吸附及准确投放的动作,不能出现吸附不上料包,在投放的过程中料包掉落,以及出现投放不准确的现象。
36.本实用新型可广泛运用于包装控制装置场合。
37.上述未提及的内容为本领域常见技术手段,最为典型的是,2012年清华大学出版社出版的教科书中《单片机原理及其应用》中有介绍,因此,上述描述和附图充分地示出了本实用新型的实施例,以使本领域的技术人员能够实践它们。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1