一种水表壳组装自动夹取装置的制作方法
1.本实用新型涉及水表技术领域,特别是涉及一种水表壳组装自动夹取装置。
背景技术:
2.水表是通过测量自来水流量来记录用水量的仪表,其主要包括水表壳体、表壳罩体以及水表机芯组成,水表壳组装时需要将表盘玻璃和橡胶垫圈依次组装在水表壳上,进而完成对水表壳的组装。传统的水表壳在组装加工时,大部分厂家采用人工操作的方式对水表壳进行组装加工,该过程未实现自动化,而工人长时间的工作易出现疲劳期,从而影响工作效率,造成生产效率较低。
技术实现要素:
3.本实用新型针对现有技术中,水表壳组装加工过程中未实现自动化,人工劳动强度较高,生产效率较低的技术问题,提供一种水表壳组装自动夹取装置,通过传感器组件精确定位抓取的位置,通过第一支臂的爪手组件取下本环节已完成的水表壳,通过第二支臂的爪手组件完成本环节待组装加工水表壳的放置,提高了抓取和放置的效率,实现水表组装加工过程的自动化,大大节约了人工成本,提高了生产效率。
4.为此,本实用新型的技术方案是,一种水表壳组装自动夹取装置,包括机器手和夹取组件,机器手设有用于安装固定的底座,底座上依次固定安装有第一关节组件、第二关节组件、第三关节组件、第四关节组件、第五关节组件、第六关节组件,夹取组件包括夹取支臂,夹取支臂通过夹取过渡座与第六关节组件固定连接,夹取支臂包括第一支臂和第二支臂,第一支臂和第二支臂的尾端固定设有爪手组件,爪手组件包括爪手气缸,爪手气缸通过气缸垫块与夹取支臂固定连接,爪手气缸的下端设有爪手,爪手组件的一侧固定设有传感器组件,传感器组件包括直角板、传感器固定板和传感器,传感器组件通过直角板与夹取支臂固定连接,传感器固定板上设有两个位置滑槽,传感器安装于传感器固定板的下端。
5.优选地,第一支臂和第二支臂之间设有夹角。
6.优选地,第一支臂和第二支臂之间的夹角为90度。
7.优选地,爪手的数量为2-3个。
8.优选地,传感器为光电传感器。
9.优选地,传感器为距离设定型传感器。
10.优选地,底座包括底板和安装板,底板和安装板之间固定设有支撑筒,支撑筒通过下肋板与底板固定连接。
11.优选地,第一关节组件的旋转角度360度,第二关节组件的旋转角度180度,第三关节组件的旋转角度180度,第四关节组件的旋转角度360度,第五关节组件的旋转角度180度,第六关节组件的旋转角度360度。
12.本实用新型的有益效果是,该水表壳组装自动夹取装置通过机器手可以完成多自由度的抓取位置的调整,因夹取支臂包括第一支臂和第二支臂,第一支臂和第二支臂的尾
端固定设有爪手组件,爪手组件的一侧设有传感器组件,在使用时,通过传感器组件精确定位抓取的位置,通过第一支臂的爪手组件取下本环节已完成的水表壳,通过第二支臂的爪手组件完成本环节待组装加工水表壳的放置,提高了抓取和放置的效率,具备结构简单,使用方便的特点。该水表壳组装自动夹取装置实现了水表组装加工过程的自动化,大大节约了人工成本,提高了生产效率。
附图说明
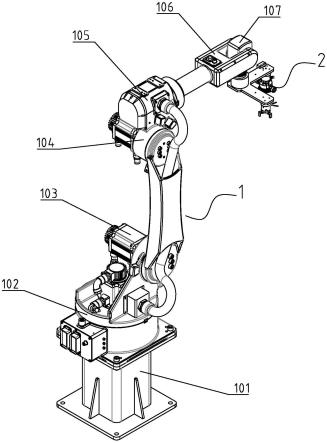
13.图1是本实用新型的整体结构示意图;
14.图2是图1的另一角度结构示意图;
15.图3是图1的右视图;
16.图4是夹取组件的结构示意图;
17.图5是夹取支臂的结构示意图;
18.图6是传感器组件结构示意图;
19.图7是图6的左视图;
20.图8是爪手组件的结构示意图;
21.图9是图8的主视图。
22.图中符号说明:
23.1.机器手;101.底座;1011.底板;1012.支撑筒;1013.安装板;1014.下肋板;102.第一关节组件;103.第二关节组件;104.第三关节组件;105.第四关节组件;106.第五关节组件;107.第六关节组件;2.夹取组件;201.夹取支臂;2011.第一支臂;2012.第二支臂;202.夹取过渡座;203.爪手组件;2031.爪手气缸;2032.爪手;2033.气缸垫块;204.传感器组件;2041.直角板;2042.传感器固定板;20421.位置滑槽;2043.传感器。
具体实施方式
24.下面结合实施例对本实用新型做进一步描述。
25.图1-图9是本实用新型一种水表壳组装自动夹取装置的实施例,其包括机器手1和夹取组件2,机器手1设有用于安装固定的底座101,底座101包括底板1011和安装板1013,底板1011和安装板1013之间固定设有支撑筒1012,支撑筒1012通过下肋板1014与底板1011固定连接,安装板1013上依次固定安装有第一关节组件102、第二关节组件103、第三关节组件104、第四关节组件105、第五关节组件106、第六关节组件107,第一关节组件102包括交流伺服电机、谐波减速器和光电传感器,第一关节组件102可实现360度的旋转,第二关节组件103包含二节大臂,二节大臂上设有交流伺服电机、rv减速器和光电传感器,第二关节组件103的旋转角度180度,第三关节组件104包含交流伺服电机、rv减速器、关节支架和光电传感器,第三关节组件104的旋转角度180度,第四关节组件105包含步进电机、同步齿形带、谐波减速器、光电传感器和四节支座,第四关节组件105的旋转角度360度,第五关节组件106包含步进电机、谐波减速器、同步齿形带、关节支座和光电传感器,第五关节组件106的旋转角度180度,第六关节组件107包含步进电机、同步齿形带、锥齿轮传动、谐波减速器和光电传感器,第六关节组件107的旋转角度360度。
26.夹取组件2包括夹取支臂201,夹取支臂201通过夹取过渡座202与第六关节组件
107固定连接,夹取支臂201包括第一支臂2011和第二支臂2012,第一支臂2011和第二支臂2012之间设有夹角,第一支臂2011和第二支臂2012之间的夹角为90度,方便第一支臂2011和第二支臂2012的交替使用,第一支臂2011和第二支臂2012的尾端固定设有爪手组件203,爪手组件203包括爪手气缸2031,爪手气缸2031通过气缸垫块与夹取支臂201固定连接,爪手气缸2031的下端设有爪手2032,爪手2032的数量为2-3个,爪手2032的内侧设有橡胶软垫,起到缓冲和防滑的作用。爪手组件203的一侧固定设有传感器组件204,传感器组件204包括直角板2041、传感器固定板2042和传感器2043,传感器组件204通过直角板2041与夹取支臂201固定连接,传感器固定板2042上设有两个位置滑槽20421,传感器2043安装于传感器固定板2042的下端,传感器2043为光电传感器,传感器2043为距离设定型传感器,如松下传感器cx-441,在投射可视光的类型中,投光光束是眼睛可见的,便于对检测物体的位置进行调整。
27.该水表壳组装自动夹取装置通过机器手1可以完成多自由度的抓取位置的调整,因夹取支臂201包括第一支臂2011和第二支臂2012,第一支臂2011和第二支臂2012的尾端固定设有爪手组件203,爪手组件203的一侧设有传感器组件204,在使用时,通过传感器组件204精确定位抓取的位置,通过第一支臂2011的爪手组件203取下本环节已完成的水表壳,通过第二支臂2012的爪手组件203完成本环节待组装加工水表壳的放置,提高了抓取和放置的效率,具备结构简单,使用方便的特点。该水表壳组装自动夹取装置实现了水表组装加工过程的自动化,大大节约了人工成本,提高了生产效率。
28.惟以上所述,仅为本实用新型的具体实施例而已,当不能以此限定本实用新型实施的范围,故其等同组件的置换,或依本实用新型专利保护范围所作的等同变化与修改,皆应仍属本实用新型权利要求书涵盖之范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1