一种自动上料码垛机的制作方法
1.本实用新型涉及码垛机技术领域,尤其涉及一种自动上料码垛机。
背景技术:
2.码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛、拆垛等任务的一类工业机器人,码垛机器人技术在解决劳动力不足、提高劳动生产效率、降低生产成本、降低工人劳动强度、改善生产环境等方面具有很大潜力。在生产过程中,产品的堆放和拿取是常规操作,在现代化高速高强度作业中,尽量避免人员的大幅度劳动,使用机器装置来实现产品的摆放和拿取,越来越普遍,根据生产需求,合理规划符合实际应用的码垛机器人,是一个需要解决的问题。
技术实现要素:
3.本实用新型的目的是提供一种自动上料码垛机,用于复合板的码垛,解决人工搬运费力、提高码垛精确的问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:
5.一种自动上料码垛机,包括主框架、移动机构、吸取机构和输送架,所述移动机构安装在所述主框架上且沿主框架的长度方向滑移设置,所述输送架安装在所述主框架的下方,所述输送架的长度延伸方向与所述主框架的长度延伸方向相垂直设置,所述移动机构包括滑移的安装在所述主框架上的主体机箱、沿竖直方向升降的安装在所述主体机箱上的连接架,所述吸取机构包括安装在连接架下端上的吸取架,所述吸取架包括两根承力梁、安装在两根所述承力梁之间的若干吸盘安装梁,所述承力梁的长度延伸方向与所述输送架的长度延伸方向相平行设置,所述吸盘安装梁与所述承力梁相垂直设置,所述吸取机构还包括安装在所述吸盘安装梁的底部两端上的吸盘。
6.作为一种具体的实施方式,所述主框架上设置有沿水平方向相互平行的第一导柱和第二导柱,所述主体机箱滑移的安装在第一导柱和第二导柱之间,所述第一导柱和第二导柱的顶部均设置有滑轨,所述第一导柱和第二导柱两者间至少一个部件的内侧设置有第一齿条,所述主体机箱包括中空的机箱外壳、安装在机箱外壳上的第一电机,所述机箱外壳内设置有与滑轨相配合的滑块,所述第一电机的输出端上安装有与所述第一齿条相啮合的第一齿轮。
7.作为一种具体的实施方式,所述连接架包括一对相互平行的竖向支架,两个所述竖向支架相对的一侧面上均设置有纵向导轨,两个所述竖向支架中至少一个竖向支架上设置有沿竖直方向延伸的第二齿条,所述机箱外壳上还设置有卡设在所述纵向导轨内、沿所述纵向导轨的长度延伸方向滑移的滑动座,所述机箱外壳上还安装有第二电机,所述第二电机的输出端上设置有与第二齿条相啮合的第二齿轮。
8.作为一种具体的实施方式,所述输送架包括输送框体、滚筒、链条和第三电机,所述滚筒分为两组,两组所述滚筒沿输送框体的宽度方向对称的排布在输送框体的顶面两
侧,每组滚筒均有多个,沿输送框体的长度方向均匀间隔分布;所述滚筒的一端端部设置有齿轮,相邻两个滚筒同侧的齿轮间通过所述链条相连,所述输送框体上还安装有传动轴,每组滚筒中、靠近传动轴的一个滚筒通过链条与所述传动轴相传动连接,所述第三电机的输出端与所述传动轴的一端链条传动连接。
9.作为一种具体的实施方式,所述输送架还包括安装在所述输送框体上的限位装置,所述限位装置包括安装在所述输送框体上的丝杆、摇轮和限位止板,所述丝杆的两端通过轴承座安装在所述输送架上且位于两组滚筒之间,所述丝杆的外端连接有摇轮,限位止板套设在所述丝杆上,摇动所述摇轮以实现限位止板在所述丝杆上位置的移动。
10.作为一种具体的实施方式,所述自动上料码垛机还包括向吸盘供气的真空泵。
11.作为一种具体的实施方式,所述吸盘安装梁的底部上还设置有多个测量位置用的探测头。
12.与现有技术相比,本实用新型的有益技术效果:通过移动机构、吸取机构和输送架的配合,移动机构带动吸取机构及产品在水平方向和竖直方向的移动,实现了机械化自动上料码垛,减少了人员的劳动强度,提高了工作效率,保障了人员安全,通过在吸取机构上设置位置检测点,提高了码垛的精度。
附图说明
13.下面结合附图说明对本实用新型作进一步说明。
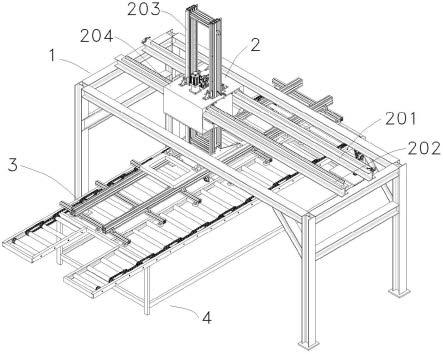
14.图1为本实用新型所述的自动上料码垛机的整体结构示意图;
15.图2为本实用新型所述的自动上料码垛机中主体机箱的结构示意图;
16.图3为图2中主体机箱内部配合示意图;
17.图4为图1的主体机箱后视图;
18.图5为本实用新型所述的自动上料码垛机中吸取机构的示意图;
19.图6为本实用新型所述的自动上料码垛机中输送架的结构示意图。
具体实施方式
20.如图1-6所示,一种自动上料码垛机,用于复合板的码垛,包括主框架1、移动机构2、吸取机构3和输送架4,移动机构2安装在主框架1上且沿主框架1的长度方向滑移设置,输送架4安装在主框架1的下方,输送架4的长度延伸方向与主框架1的长度延伸方向相垂直设置。
21.具体的,移动机构2包括滑移的安装在主框架1上的主体机箱204、沿竖直方向升降的安装在主体机箱204上的连接架,吸取机构3包括安装在连接架下端上的吸取架,吸取架包括两根承力梁301、安装在两根承力梁301之间的若干吸盘安装梁302,承力梁301的长度延伸方向与输送架4的长度延伸方向相平行设置,吸盘安装梁302与承力梁301相垂直设置,吸取机构3还包括安装在吸盘安装梁302的底部两端上的吸盘303。通过移动机构2带动吸取机构3的平移和升降,实现吸盘303带动产品的移动。
22.进一步的,主框架1上设置有沿水平方向相互平行的第一导柱201和第二导柱202,主体机箱204滑移的安装在第一导柱201和第二导柱202之间,第一导柱201和第二导柱202的顶部均设置有滑轨,第一导柱201和第二导柱202两者间至少一个部件的内侧设置有第一
齿条209,主体机箱204包括中空的机箱外壳205、安装在机箱外壳205上的第一电机211,机箱外壳205内设置有与滑轨相配合的滑块207,第一电机211的输出端上安装有与第一齿条209相啮合的第一齿轮。这里,滑块207有4个,每两个为一组,分别卡设在两侧的第一导柱201和第二导柱202的滑轨上,实现水平方向的滑动,第一电机211所连接的齿轮与第一齿条209配合,来精确控制滑动的距离和方向。
23.进一步的,连接架包括一对相互平行的竖向支架203,两个竖向支架203相对的一侧面上均设置有纵向导轨208,两个竖向支架203中至少一个竖向支架203上设置有沿竖直方向延伸的第二齿条210,机箱外壳205上还设置有卡设在纵向导轨208内、沿纵向导轨208的长度延伸方向滑移的滑动座206,机箱外壳205上还安装有第二电机212,第二电机212的输出端上设置有与第二齿条210相啮合的第二齿轮。两个竖向支架203带动底部的吸取机构3实现竖直方向的滑动。
24.本例中,该输送架4包括输送框体、滚筒401、链条402和第三电机406,滚筒401分为两组,两组滚筒401沿输送框体的宽度方向对称的排布在输送框体的顶面两侧,每组滚筒401均有多个,沿输送框体的长度方向均匀间隔分布;滚筒401的朝向输送框架的外端端部设置有齿轮,相邻两个滚筒401的齿轮间通过链条402相连,输送框体上还安装有传动轴,每组滚筒401中、靠近传动轴的一个滚筒401通过链条与传动轴相传动连接,第三电机406的输出端与传动轴的一端链条传动连接。通过第三电机406带动传动轴转动进而带动两组滚筒401的滚动,实现滚筒401顶部产品的自动运送。
25.如图6,输送架4还包括安装在输送框体上的限位装置,该限位装置包括安装在输送框体上的丝杆403、摇轮404和限位止板405,丝杆403的两端通过轴承座安装在输送架4上且位于两组滚筒401之间,丝杆403的外端连接有摇轮404,限位止板405套设在丝杆403上,摇动摇轮404以实现限位止板405在丝杆403上位置的移动。通过限位装置限定运送过来的产品的位置范围。
26.另外,自动上料码垛机还包括向吸盘303供气的真空泵(图中未示出)。吸盘安装梁302的底部上还设置有多个测量位置用的探测头。多个吸盘303与真空泵连接,通过吸盘303的吸附作用,实现对输送架4上的产品进行吸附、拿取;通过探测头来检测产品在输送架上的位置。这里,该自动上料码垛机还包括设置在主框架1上的控制面板,真空泵、探测头、第一电机、第二电机及第三电机分别与控制面板相通讯连接,通过控制面板来对真空泵、探测头、第一电机、第二电机及第三电机进行控制。该过程为现有技术中常规的控制方式,在此不进行详细叙述。
27.本实用新型的工作过程如下:
28.首先,调整摇轮404确定限位止板405的位置,产品放置在输送架4上,由控制面板控制第三电机406驱动滚筒401旋转使产品在输送架4上输送,当探测头检测到产品到达设定位置后,将信号传输给控制面板,由控制面板给出信号给第三电机406,使产品停止输送;
29.然后,由控制面板向第一电机211发出信号,通过第一电机211驱动主体机箱204在主框架1上做水平运动至位于产品的上方,而后再由控制面板向第二电机212发出信号,通过第二电机212驱动连接架带动底部的吸取机构3向下滑动至产品位置,而后由控制面板向真空泵发出信号,由真空泵通过吸盘303吸住产品;
30.随后,再次由控制面板相第一电机211、第二电机212发出信号,通过第二电机212
驱动连接架带动底部的吸取机构3向上滑动再通过第一电机211驱动主体机箱204在主框架1上做水平运动至产品码放点;
31.往复上述操作以完成产品的摞放码垛。
32.以上所述的实施例仅是对本实用新型的优选方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1