一种自动检测打包机构及智能垃圾桶的制作方法
1.本实用新型涉及一种智能家居,特别涉及一种自动检测打包机构及智能垃圾桶。
背景技术:
2.智能垃圾桶,作为一种能够实现自动开启和关闭垃圾桶盖,并且还能够完成自动打包的智能家具设备,彻底的解决了传统垃圾桶对使用者存在的卫生污染的隐患,并能有效杜绝各种传染性疾病通过垃圾进行传播和防止桶内垃圾气味溢出,因此越来越广泛地应用于家庭中。
3.这种智能垃圾桶包括桶身以及桶盖,其中还设置有智能打包机构,可以对垃圾袋进行打包处理;使用时将垃圾袋套设在桶身内的容纳腔中,桶盖可通过手动开合或自动开合的方式将垃圾投入至其中,每隔一段时间后,启动打包机构完成垃圾袋打包,但因为垃圾桶自身结构原因使得使用者并不能随时随地观测到其中的垃圾盛放量,无法精准的在应当进行打包的位置进行打包,可能导致打包时垃圾量过多而无法完整的打包,造成垃圾泄漏。
技术实现要素:
4.本实用新型的目的是提供一种自动检测打包机构及智能垃圾桶。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种自动检测打包机构,包括大盖,所述大盖上设置有贯穿其厚度的垃圾投放槽,还包括与垃圾投放槽相契合的小盖;还包括与小盖连接的转动轴,所述大盖上设置有用于驱动转动轴转动的驱动机构;所述小盖随转动轴转动露出垃圾投放槽后其中一端部伸入进垃圾投放槽中。
6.通过采用上述技术方案,驱动机构带动转动轴转动,从而将小盖以转动轴为轴转动,将垃圾投放槽露出或关闭;当小盖恰好安设在垃圾投放槽中,垃圾投放槽关闭;而随着转动轴转动,小盖的一端向垃圾投放槽中深入,若垃圾桶内的垃圾量少时,小盖伸入的端部不与垃圾干涉,小盖可以完全打开,使用者可以进行垃圾投入;当垃圾桶内的垃圾量多时,小盖伸入的端部与垃圾干涉,小盖无法打开,即向垃圾桶传输信号,可以进行垃圾打包。
7.作为优选,所述驱动机构包括驱动马达以及传动蜗轮;所述传动蜗轮与转动轴同轴套设;所述驱动马达驱动传动蜗轮转动。
8.作为优选,所述驱动马达的输出端设置有与传动蜗轮啮合的传动蜗杆。
9.通过采用上述技术方案,通过蜗轮蜗杆相互传动,从而将驱动马达的动力传送至转动轴上。
10.作为优选,所述大盖上延伸设置有固定部,所述固定部从垃圾投放槽处延伸设置;所述固定部上设置有供转动轴穿设的插接通孔。
11.作为优选,所述小盖上延伸设置有连接部,所述连接部上设置有供转动轴穿过的连接孔,所述转动轴通过螺栓连接或铆接与连接部固定。
12.本实用新型的目的是提供一种智能垃圾桶。
13.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种包括上述自动
检测打包机构的智能垃圾桶。
14.综上所述,本实用新型具有以下有益效果:
15.1、小盖的一端向垃圾投放槽中深入,若垃圾桶内的垃圾量少时,小盖伸入的端部不与垃圾干涉,小盖可以完全打开,使用者可以进行垃圾投入;当垃圾桶内的垃圾量多时,小盖伸入的端部与垃圾干涉,小盖无法打开,即向垃圾桶传输信号,可以进行垃圾打包;
16.2、通过这种简单的结构可以快速检测垃圾桶内的垃圾盛放量,不需要在单独设定其他检测结构,且检测结构准确。
附图说明
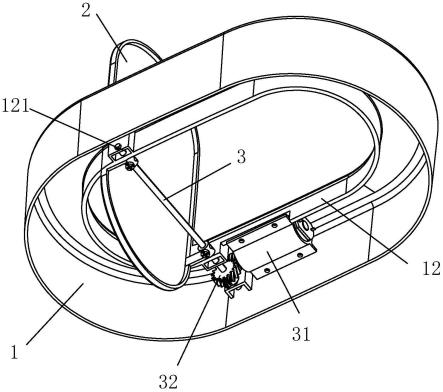
17.图1是实施例中整体结构轴测图;
18.图2是实施例中部分结构等轴侧示意图;
19.图3是实施例中部分结构示意图ⅰ;
20.图4是实施例中部分结构示意图ⅱ。
21.图中,1、大盖;11、垃圾投放槽;12、固定部;121、插接通孔;2、小盖;21、连接部;211、连接孔;3、转动轴;31、驱动马达;32、传动蜗轮;33、传动蜗杆。
具体实施方式
22.以下结合附图对本实用新型作进一步详细说明。
23.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
24.实施例:
25.一种智能垃圾桶,包括自动检测打包机构,如图1、2所示,包括大盖1,大盖1与垃圾桶身连接,大盖1上设置有贯穿其厚度的垃圾投放槽11,当垃圾投放槽11打开时,使用者可通过此向内投放垃圾,还包括与垃圾投放槽11相契合的小盖2;还包括与小盖2固定连接的转动轴3,大盖1上设置有用于驱动转动轴3转动的驱动机构;在驱动机构的驱动作用下,转动轴3转动,从而驱动小盖2以转动轴3为轴进行转动,露出垃圾投放槽11后或关闭垃圾投放槽11;当转动露出垃圾投放槽11时,小盖2的一端伸入进垃圾投放槽11中,若垃圾桶内的垃圾量多时,小盖伸入的端部与垃圾干涉,小盖无法完全打开,此时可向垃圾桶传输信号,可以进行垃圾打包,也可由使用者手动操作,进行垃圾打包。
26.如图2、3所示,驱动机构包括驱动马达31以及传动蜗轮32;传动蜗轮32与转动轴3同轴套设;驱动马达31驱动传动蜗轮32转动。
27.如图2、3所示,驱动马达31的输出端设置有与传动蜗轮32啮合的传动蜗杆33;驱动马达31固定在大盖1上。
28.如图3所示,大盖1上延伸设置有固定部12,固定部12从垃圾投放槽11处延伸设置;固定部12上设置有供转动轴3穿设的插接通孔121;通过设置这样的结构可以在多处为转动轴提供固定点,使结构更加稳定。
29.如图3、4所示,小盖2上延伸设置有连接部21,连接部21上设置有供转动轴3穿过的连接孔211,转动轴3通过螺栓连接或铆接与连接部21固定。
30.工作原理:
31.驱动马达31驱动传动蜗轮32转动,并将动力通过传动蜗轮32传递至转动轴处;随着转动轴3转动,可以驱动小盖2以转动轴3为轴进行转动,当转动轴3正向转动时,露出垃圾投放槽11,小盖2的一端伸入进垃圾投放槽11中,若垃圾桶内的垃圾量多时,小盖伸入的端部与垃圾干涉,小盖无法完全打开,此时可向垃圾桶传输信号,可以进行垃圾打包,也可由使用者手动操作,进行垃圾打包;当转动轴3反向转动时,垃圾投放槽11关闭。
技术特征:
1.一种自动检测打包机构,包括大盖(1),其特征在于:所述大盖(1)上设置有贯穿其厚度的垃圾投放槽(11),还包括与垃圾投放槽(11)相契合的小盖(2);还包括与小盖(2)连接的转动轴(3),所述大盖(1)上设置有用于驱动转动轴(3)转动的驱动机构;所述小盖(2)随转动轴(3)转动露出垃圾投放槽(11)后其中一端部伸入进垃圾投放槽(11)中。2.根据权利要求1所述一种自动检测打包机构,其特征在于:所述驱动机构包括驱动马达(31)以及传动蜗轮(32);所述传动蜗轮(32)与转动轴(3)同轴套设;所述驱动马达(31)驱动传动蜗轮(32)转动。3.根据权利要求2所述一种自动检测打包机构,其特征在于:所述驱动马达(31)的输出端设置有与传动蜗轮(32)啮合的传动蜗杆(33)。4.根据权利要求1所述一种自动检测打包机构,其特征在于:所述大盖(1)上延伸设置有固定部(12),所述固定部(12)从垃圾投放槽(11)处延伸设置;所述固定部(12)上设置有供转动轴(3)穿设的插接通孔(121)。5.根据权利要求1所述一种自动检测打包机构,其特征在于:所述小盖(2)上延伸设置有连接部(21),所述连接部(21)上设置有供转动轴(3)穿过的连接孔(211),所述转动轴(3)通过螺栓连接或铆接与连接部(21)固定。6.一种包括权利要求1-5中任一所述自动检测打包机构的智能垃圾桶。
技术总结
本实用新型涉及到一种自动检测打包机构及智能垃圾桶,包括大盖以及贯穿其厚度的垃圾投放槽,与圾投放槽相契合的小盖,与小盖连接的转动轴;大盖上设有用于驱动转动轴转动的驱动机构;小盖随转动轴转动露出垃圾投放槽后其中一端部伸入进垃圾投放槽中;驱动机构带动转动轴转动,从而将小盖以转动轴为轴转动,将垃圾投放槽露出或关闭;当小盖恰好安设在垃圾投放槽中,垃圾投放槽关闭;而随着转动轴转动,小盖的一端向垃圾投放槽中深入,若垃圾桶内的垃圾量少时,小盖伸入的端部不与垃圾干涉,小盖可以完全打开,使用者可以进行垃圾投入;当垃圾桶内的垃圾量多时,小盖伸入的端部与垃圾干涉,小盖无法打开,即向垃圾桶传输信号,可以进行垃圾打包。行垃圾打包。行垃圾打包。
技术研发人员:张卫国
受保护的技术使用者:上海贝格里特电子科技有限公司
技术研发日:2022.08.11
技术公布日:2023/3/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1