一种基于智能即时打印贴标系统的标签双向驱动机构的制作方法
1.本实用新型属于贴标机技术领域,尤其涉及一种基于智能即时打印贴标系统的标签双向驱动机构。
背景技术:
2.自动贴标机是可以将成卷的纸或金属箔标签粘贴在规定的包装容器或产品上的设备,标签背面自带粘胶并有规律地排列在光面的底纸上,贴标机上的剥标机构可将其自动剥离,贴标可完成平面粘贴,包装物的单面或多面粘贴,柱面粘贴,局部覆盖或全覆盖圆筒粘贴,凹陷及边角部位粘贴等各种作业。
3.市面上自动贴标机的种类很多,功能各异,但基本原理都是相似的,绝大部分的自动贴标机是以粘合剂把纸或金属箔标签粘贴在规定的包装容器上的设备,工作效率低,稳定运行的频率约为30次/分钟,打印引擎浪费色带,打印引擎只能安装300米长色带,更换频率高,费工时,贴标过程不稳定,有掉标风险,贴标位置不精确,我们提出来一种基于智能即时打印贴标系统的标签双向驱动机构解决上述问题。
技术实现要素:
4.针对上述问题,本实用新型提供一种基于智能即时打印贴标系统的标签双向驱动机构,其通过设置双向驱动机构,标签正向驱动为正向驱动机构单驱动控制,反向驱动机构为无动力状态,因此标签在正向运动时,本智能即时打印贴标系统的弹力标签辊机构和压标机构都能正常地起作用,达到标签绷紧的状态,从而保证标签运行精度与稳定;标签反向驱动为正向驱动机构和反向驱动机构双驱动同步完成,保证标签反向运动的精度与稳定性;在正常生产过程中,标签正向驱动的单驱动和标签反向驱动的双驱动交替进行,保证了标签持续生产运行的精度与稳定性。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种基于智能即时打印贴标系统的标签双向驱动机构,包括贴标机主体,所述贴标机主体的正面固定安装有双向驱动结构。
7.优选地,所述双向驱动结构包括伺服电机、第三同步带轮、正向驱动结构、反向驱动结构、支撑立柱、外侧支撑板和同步带,所述贴标机主体的前侧固定安装有伺服电机,所述伺服电机输出轴的外表面固定安装有第三同步带轮,所述贴标机主体的正面固定安装有正向驱动结构,所述贴标机主体的正面固定安装有反向驱动结构,所述贴标机主体的设置有数量为四个的支撑立柱,四个所述支撑立柱的外表面固定安装有外侧支撑板,所述正向驱动结构、反向驱动结构和第三同步带轮的外表面传动连接有同步带。
8.优选地,所述正向驱动结构包括第一驱动主动软轴、第一同步带轮和第一驱动被动滚花硬轴,下侧所述支撑立柱的外表面转动连接有第一驱动主动软轴,所述第一驱动主动软轴的外表面固定安装有第一同步带轮,上侧所述支撑立柱的外表面转动连接有第一驱动被动滚花硬轴。
9.优选地,所述反向驱动结构包括第二驱动主动软轴、第二同步带轮和第二驱动被动滚花硬轴,下侧所述支撑立柱的外表面转动连接有第二驱动主动软轴,所述第二驱动主动软轴的外表面固定安装有第二同步带轮,上侧所述支撑立柱的外表面转动连接有第二驱动被动滚花硬轴。
10.优选地,四个所述支撑立柱分为两组,一组为两个,上侧两个所述支撑立柱与反向驱动结构相对应,下侧两个所述支撑立柱与正向驱动结构相对应。
11.优选地,所述正向驱动结构位于反向驱动结构的上方,且正向驱动结构与反向驱动结构位于同一竖向水平线上。
12.优选地,所述第二驱动主动软轴通过逆时针单向轴承与支撑立柱转动连接,所述第一同步带轮、第二同步带轮和第三同步带轮通过同步带连接。
13.与现有技术相比,本实用新型的有益效果为:
14.1、通过设置双向驱动机构,实现了热转印打码机打印范围和标签就绪位置的动态统一,使得热转印打码机在即时贴标打印行业的应用成为可能;标签正向驱动为正向驱动机构单驱动控制,反向驱动机构为无动力状态,因此标签在正向运动时,本智能即时打印贴标系统的弹力标签辊机构和压标机构都能正常地起作用,达到标签绷紧的状态,从而保证标签运行精度与稳定;标签反向驱动为正向驱动机构和反向驱动机构双驱动同步完成,保证标签反向运动的精度与稳定性;在正常生产过程中,标签正向驱动的单驱动和标签反向驱动的双驱动交替进行,保证了标签持续生产运行的精度与稳定性。
15.2、通过设置双向驱动机构,可使用热转印打码机,在标签停止的时候打印,标签运行的速度和打印的速度可以各自设定,互不影响;热转印打码机安装的色带最长支持1200米,热转印打印机有专门的色带盒,可以很快更换色带,这在很大程度上减少了停机更换色带的时间,提高生产效率,热转印打印机的色带上的相邻两次使用过的痕迹间隙稳定在0.5毫米左右,极大地节省了色带的消耗,降低生产成本,可使用热转印打码机和刮贴的贴标方式,即标签在剥离的同时直接完成贴标,绝不会产生掉标现象,贴标稳定性高、贴标效率高、贴标精度高。
附图说明
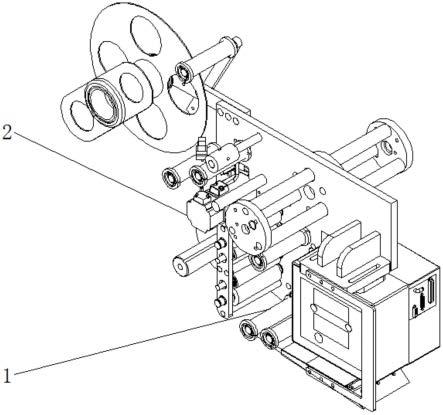
16.图1为本实用新型提出的一种基于智能即时打印贴标系统的标签双向驱动机构的三维结构示意图;
17.图2为本实用新型提出的一种基于智能即时打印贴标系统的标签双向驱动机构正视图;
18.图3为本实用新型提出的一种基于智能即时打印贴标系统的标签双向驱动机构中的双向驱动结构局部示意图。
19.图中:1贴标机主体、2双向驱动结构、201伺服电机、202第三同步带轮、203正向驱动结构、2031第一驱动主动软轴、2032第一同步带轮、2033第一驱动被动滚花硬轴、204反向驱动结构、2041 第二驱动主动软轴、2042第二同步带轮、2043第二驱动被动滚花硬轴、205支撑立柱、206外侧支撑板、207同步带。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1-3,一种基于智能即时打印贴标系统的标签双向驱动机构,包括贴标机主体1,贴标机主体1的正面固定安装有双向驱动结构2,该智能即时打印贴标系统由固定机构、主机板、放标签机构、第一标签过渡辊、标签用尽报警电眼、弹力过渡辊机构、第二标签过渡辊、压标机构、伺服电机、标签双向驱动机构、第三标签过渡辊、检标电眼、第四标签过渡辊、标签剥离承印机构、热转印打码机(tto)、热转印打码机固定支架、第五标签过渡辊、标签底纸回收机构、检物光电、抚标辊和控制系统组成。
22.在图2和图3中,双向驱动结构2由伺服电机201、第三同步带轮202、正向驱动结构203、反向驱动结构204、支撑立柱205、外侧支撑板206和同步带207七个部件组成,贴标机主体1的前侧固定安装有伺服电机201,根据运行指令带动安装在一起的第三同步带轮 202按逆时针方向转动,伺服电机201输出轴的外表面固定安装有第三同步带轮202,用于带动同步带207转动,贴标机主体1的正面固定安装有正向驱动结构203,贴标机主体1的正面固定安装有反向驱动结构204,正向驱动结构203与反向驱动结构204相互配合,带动标签运转,贴标机主体1的设置有数量为四个的支撑立柱205,分别用于安装第一驱动主动软轴2031、第一驱动被动滚花硬轴2033、第二驱动主动软轴2041和第二驱动被动滚花硬轴2043,四个支撑立柱205的外表面固定安装有外侧支撑板206,用于对四个支撑立柱205 进行位置的基本固定,正向驱动结构203、反向驱动结构204和第三同步带轮202的外表面传动连接有同步带207,用于带动第一同步带轮2032和第二同步带轮2042也以逆时针方向转动。
23.在图2和图3中,在安装中,正向驱动结构203由第一驱动主动软轴2031、第一同步带轮2032和第一驱动被动滚花硬轴2033三个部件组成,正向驱动机构203的第一同步带轮2032逆时针方向的转动直接传递给第一驱动主动软轴2031,从而带动第一驱动主动软轴 2031与第一驱动被动滚花硬轴2033压住的标签正向运行。
24.在图2和图3中,在安装中,反向驱动结构204由第二驱动主动软轴2041、第二同步带轮2042和第二驱动被动滚花硬轴2043由三个部件组成,第二同步带轮2042在第三同步带轮202的带动下进行逆时针方向运行。
25.在图2和图3中,四个支撑立柱205分为两组,一组为两个,上侧两个支撑立柱205与反向驱动结构204相对应,下侧两个支撑立柱 205与正向驱动结构203相对应,对第一驱动主动软轴2031、第一驱动被动滚花硬轴2033、第二驱动主动软轴2041和第二驱动被动滚花硬轴2043进行支撑。
26.在图2和图3中,正向驱动结构203位于反向驱动结构204的上方,且正向驱动结构203与反向驱动结构204位于同一竖向水平线上,使得标签和同步带207的运行更加流畅。
27.在图2和图3中,第二驱动主动软轴2041通过逆时针单向轴承与支撑立柱205转动连接,因单向轴承为顺时针锁止、逆时针为轴承功能,即第二同步带轮2042以逆时针方向转动时,第二驱动主动软轴2041为逆时针无动力状态和顺时针方向转动无阻碍状态,实现标签的正常正向运行和张力控制,保证标签绷紧能有效剥离与自动贴标,第一同步带轮2032、第二同步带轮2042和第三同步带轮202通过同步带207连接进行同步转动。
28.在图2和图3中,第一驱动主动软轴2031与第一驱动被动滚花硬轴2033在运行状态时通过锁紧块压紧在一起,给标签运行传递动力,并防止打滑,第二驱动主动软轴2041与第二驱动被动滚花硬轴 2043在运行状态时通过锁紧块2压紧在一起,给标签运行传递动力,并防止打滑。
29.现对本实用新型的操作原理做如下描述:
30.1、标签正向驱动时,控制系统发送指令给伺服电机201,伺服电机201根据运行指令带动安装在一起的第三同步带轮202按逆时针方向转动,从而带动通过同步带207连接的第一同步带轮2032和第二同步带轮2042也以逆时针方向转动,此时,正向驱动机构203的第一同步带轮2032将逆时针方向的转动直接传递给第一驱动主动软轴2031,从而带动第一驱动主动软轴2031与第一驱动被动滚花硬轴 2033压住的标签正向运行,此时反向驱动机构204的第二同步带轮 2042也是以逆时针方向运行,因反向驱动机构204内的单向轴承为顺时针锁止、逆时针为轴承功能,即第二同步带轮2042以逆时针方向转动时,第二驱动主动软轴2041为逆时针无动力状态和顺时针方向转动无阻碍状态。
31.2、标签反向驱动时,控制系统发送指令给伺服电机201,伺服电机201根据运行指令带动安装在一起的第三同步带轮202按顺时针方向转动,从而带动通过同步带连接的第一同步带轮2032和第二同步带轮2042也以顺时针方向转动,正向驱动机构203的第一同步带轮2032将顺时针方向的转动直接传递给第一驱动主动软轴2031,从而带动第一驱动主动软轴2031与第一驱动被动滚花硬轴2033压住的标签以反向送标,同时反向驱动机构204的第二同步带轮2042也是以顺时针方向运行,因反向驱动机构204内的单向轴承为顺时针锁止、逆时针为轴承功能,即第二同步带轮2042以顺时针方向转动时,能将顺时针方向的转动传递给第二驱动主动软轴2041,从而带动反向驱动机构204的第二驱动主动软轴2041和第二驱动被动滚花硬轴 2043压住的标签以顺时针方向运行,从达到了驱动标签回退的功能,以上特征将实现标签的反向运行并保持同步,提高了反向运行停标的精度,从而保证了打印位置的准确度。
32.在使用中,通过设置双向驱动机构2,实现了热转印打码机打印范围和标签就绪位置的动态统一,使得热转印打码机在即时贴标打印行业的应用成为可能;标签正向驱动为正向驱动机构203单驱动控制,反向驱动机构204为无动力状态,因此标签在正向运动时,本智能即时打印贴标系统的弹力标签辊机构和压标机构都能正常地起作用,达到标签绷紧的状态,从而保证标签运行精度与稳定;标签反向驱动为正向驱动机构203和反向驱动机构204双驱动同步完成,保证标签反向运动的精度与稳定性;在正常生产过程中,标签正向驱动的单驱动和标签反向驱动的双驱动交替进行,保证了标签持续生产运行的精度与稳定性。
33.而且,双向驱动机构2可使用热转印打码机,在标签停止的时候打印,标签运行的速度和打印的速度可以各自设定,互不影响;热转印打码机安装的色带最长支持1200米,热转印打印机有专门的色带盒,可以很快更换色带,这在很大程度上减少了停机更换色带的时间,提高生产效率,热转印打印机的色带上的相邻两次使用过的痕迹间隙稳定在0.5毫米左右,极大地节省了色带的消耗,降低生产成本,可使用热转印打码机和刮贴的贴标方式,即标签在剥离的同时直接完成贴标,决不会产生掉标现象,贴标稳定性高、贴标效率高、贴标精度高。
34.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1