一种搬运机器人的制作方法
1.本实用新型属于仓储技术领域,更具体地,涉及一种搬运机器人。
背景技术:
2.随着人工智能技术、自动化技术、和信息技术的飞速发展,末端物流的智能化程度也随着不断提高,智能物流终端是末端物流发展的趋势,搬运机器人是可以实现智能物流终端并进行自动化搬运作业的主要设备之一,通过搬运机器人能够减轻人类繁重的体力劳动,并提高搬运作业效率。相关的搬运机器人缓存货物的稳定性较差。
技术实现要素:
3.有鉴于此,本实用新型提供一种搬运机器人,以解决如何提高搬运机器人缓存稳定性的技术问题。
4.本实用新型的技术方案是这样实现的:
5.本实用新型实施例提供一种搬运机器人,包括:支撑架;缓存机构;所述缓存机构包括:缓存架,所述缓存架具有在第一方向相对的第一端和第二端,其中,所述第一端与所述支撑架连接,所述第一方向与水平方向呈第一锐角设置,所述第二端在竖直方向上高于所述第一端;限位机构,沿所述缓存架的周向突出设置,以与所述缓存架之间形成限位区。
6.一些实施例中,所述第一锐角大于0度且小于等于5度。
7.一些实施例中,所述限位机构包括:第一限位组件,在竖直方向上相对所述所述缓存架突起,靠近所述缓存架的第一端设置;第二限位组件,在竖直方向上相对所述所述缓存架突起,设置在所述缓存架的至少一侧部,其中,所述侧部为所述所述缓存架在所述第一方向的两侧。
8.一些实施例中,所述第一限位组件包括:第一延伸部,沿竖直方向延伸,所述第一延伸部在竖直方向的一端与所述缓存架连接;第二延伸部,所述第二延伸部的一端与所述第一延伸部的另一端连接,且与竖直方向呈第二锐角设置,所述第二延伸部的另一端相对一端远离所述缓存架的中心。
9.一些实施例中,所述第二锐角大于等于10度且小于等于45度。
10.一些实施例中,所述第二限位组件包括:第一导向件,沿所述第一方向延伸;第二导向件,所述第二导向件的一端与所述第一导向件靠近所述第一端的一端连接,所述第二导向件与所述第一导向件呈第三锐角设置;所述第二导向件的另一端在第二方向上相对所述第二导向件的一端远离所述缓存架的中心,所述第二方向垂直所述第一方向。
11.一些实施例中,所述第三锐角大于等于10度且小于等于45度。
12.一些实施例中,所述第一导向件包括第一延伸部和第二延伸部,所述第一延伸部沿竖直方向延伸,所述第一延伸部的一端与所述缓存架连接,另一端与所述第二延伸部连接,所述第二延伸部与竖直方向呈第二锐角设置;和/或,所述第二导向件包括第一延伸部和第二延伸部,所述第一延伸部沿竖直方向延伸,所述第一延伸部的一端与所述缓存架连
接,另一端与所述第二延伸部连接,所述第二延伸部与竖直方向呈第二锐角设置。
13.一些实施例中,所述缓存机构还包括:滚动组件,与所述缓存架可活动地连接,至少部分突出于所述限位区内。
14.一些实施例中,所述缓存机构设置有多个,多个所述缓存机构在所述支撑架的竖直方向上间隔设置。
15.本实用新型实施例提供了一种搬运机器人,该搬运机器人包括支撑架和缓存机构,该缓存机构包括缓存架和限位机构,其中缓存架具有在第一方向的第一端和第二端,第一端与支撑架连接,第二端在竖直方向上高于第一端,且第一方向与水平方向呈第一锐角设置,限位机构沿缓存架的周向突出设置,以与缓存架之间形成限位区。本实用新型实施例通过将搬运机器人中的缓存架的第一方向与水平方向倾斜设置,能够使缓存架上的货物具有靠近支撑架方向的运动趋势,降低货物从缓存架上脱落的风险;缓存架的周向上还突出设置限位机构,限位机构能够对货物的周向起到阻挡作用,降低货物在缓存架上晃动的风险,进一步提高了搬运机器人搬运货物过程的稳定性。
附图说明
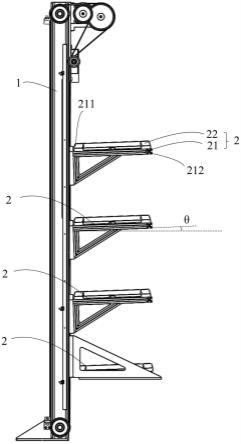
16.图1为本实用新型实施例的搬运机器人的侧视图;
17.图2为本实用新型实施例的搬运机器人的立体图;
18.图3为本实用新型实施例的缓存机构的立体图;
19.图4为本实用新型实施例的缓存机构的俯视图;
20.图5为本实用新型实施例的缓存机构的主视图。
21.附图标记说明:
22.1、支撑架;2、缓存机构;200、限位区;21、缓存架;211、第一端;212、第二端;22、限位机构;221、第一限位组件;222、第二限位组件;2221、第一导向件;2222、第二导向件;3、第一延伸部;4、第二延伸部;5、滚动组件。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.在具体实施例中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,例如通过不同的具体技术特征的组合可以形成不同的实施例和技术方案。为了避免不必要的重复,本实用新型中各个具体技术特征的各种可能的组合方式不再另行说明。
25.在以下的描述中,所涉及的术语“第一\第二\...”仅仅是区别不同的对象,不表示各对象之间具有相同或联系之处。应该理解的是,所涉及的方位描述“上方”、“下方”、“外”、“内”均为正常使用状态时的方位,“左”、“右”方向表示在具体对应的示意图中所示意的左右方向,可以为正常使用状态的左右方向也可以不是。
26.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括
没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
…”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。“多个”表示大于或等于两个。
27.本实用新型实施例提供一种搬运机器人,该搬运机器人用于将货物从一个位置搬运至另一个位置,在搬运过程中,搬运机器人可同时对多个货物进行缓存,以提高搬运的效率,该搬运机器人可用于有货架的货物仓储系统中,也可用于无货架的货物仓储系统中。需要说明的是,本实用新型实施例的应用场景类型并不对本实用新型实施例的搬运机器人的结构产生限定。
28.本实用新型实施例提供了一种搬运机器人,如图1所示,图1所示实施例仅对搬运机器人的部分结构示意,该搬运机器人包括支撑架1和缓存机构2。支撑架1作为整个搬运机器人的支撑结构,起到支撑和限位作用,缓存机构2固定在支撑架1上,缓存机构2用于对搬运机器人所搬运的货物进行暂时存放,以实现搬运机器人可以对多个货物集中运送。
29.如图2所示,该缓存机构2包括缓存架21和限位机构22。缓存架21具有在第一方向(图2所示x方向)相对的第一端211和第二端212,其中,第一端211与支撑架1连接,需要说明的是,本实用新型实施例不对缓存机构2与支撑架1连接的形式进行限定,例如,缓存架21可与支撑架1通过焊接的形式实现永久性的固定,缓存架21还可与支撑架1用过卡接件或者其他连接件实现可拆卸地连接,只要缓存架21可与支撑架1保持相对静止即可。缓存架21用于放置待转运的货物,因此,通过缓存架21与支撑架1的固定,能够提高货物放置的稳定性。
30.结合图1所示,第一方向与水平方向(图1所示左右方向)呈第一锐角θ设置,第二端212在竖直方向(图1所示上下方向)上高于第一端211。需要说明的是,本实用新型实施例所述的水平方向和竖直方向为绝对坐标系下的水平面的方向和竖直面的方向。本实用新型实施例通过将缓存架与水平方向呈第一锐角设置,且第二端高于第一端,将货物放置在缓存架的状态下,由于缓存架相对水平方向倾斜设置,货物的重力在缓存架的表面方向具有分量,重力分量使得缓存架上的货物朝向第一端的方向运动的趋势,支撑架能够对货物起到支撑作用,使得货物能够稳定的抵靠在支撑架上,在搬运机器人运动的过程中,搬运机器人受到颠簸可能会影响到缓存架上的货物,由于货物的重力分量抵靠支撑架,故搬运机器人需要更大的外力才能克服货物的重力分量,因此,增加了缓存架上货物晃动的难度,从而提高了货物放置在缓存架上的稳定性。
31.如图2所示,限位机构22沿缓存架21的周向突出设置,周向表示的是缓存架21的四周,本实用新型实施例中的限位机构22可以设置在缓存架21的周向上的至少一侧,也就是说,限位机构22可以不完全包围缓存架21的四周只要限位机构22设置在缓存架21的周向即可。限位机构22与缓存架21之间形成限位区200。突出表示的是限位机构22相对于缓存架21的上表面突起,放置在限位区200内的货物的周向受到限位机构22的阻挡,在搬运机器人受外力颠簸的过程中,突出的限位机构22能够对货物周向起到阻挡作用,降低货物相对缓存架的表面晃动。搬运机器人上的搬运机构可将货物搬运至限位区200内,限位机构22能够对货物起到限位作用,降低货物在缓存架21上晃动的风险,提高货物搬运的平稳性。需要说明的是,图1中未示意出搬运机器人中的搬运机构,也就是说,本实用新型实施例不对搬运机构的结构进行限定,无论搬运机构采用何种形式只要能够实现将货物搬运至缓存机构即可。
32.本实用新型实施例提供了一种搬运机器人,该搬运机器人包括支撑架和缓存机构,该缓存机构包括缓存架和限位机构,其中缓存架具有在第一方向的第一端和第二端,第一端与支撑架连接,第二端在竖直方向上高于第一端,且第一方向与水平方向呈第一锐角设置,限位机构沿缓存架的周向突出设置,以与缓存架之间形成限位区。本实用新型实施例通过将搬运机器人中的缓存架的第一方向与水平方向倾斜设置,能够使缓存架上的货物具有靠近支撑架方向的运动趋势,降低货物从缓存架上脱落的风险;缓存架的周向上还突出设置限位机构,限位机构能够对货物的周向起到阻挡作用,降低货物在缓存架上晃动的风险,进一步提高了搬运机器人搬运货物过程的稳定性。
33.在一些实施例中,如图1所示,第一锐角θ大于0度且小于等于5度。本实用新型实施例通过将第一锐角大于0度,使得缓存架21能够相对水平方向倾斜设置,以提高缓存架上货物的平稳性,通过将第一锐角小于等于5度,使得缓存架相对水平方向倾斜的角度不会太大,以降低货物转运的难度,因此,本实用新型实施例通过将缓存架与水平方向的第一锐角限定在一定范围内,既能够提高缓存架上货物的平稳性,又能够提高搬运机器人中货物搬运的效率。
34.在一些实施例中,如图3所示,限位机构22包括第一限位组件221和第二限位组件222。第一限位组件221在竖直方向上相对缓存架21突起,第一限位组件221靠近缓存架21的第一端211设置,靠近第一端211表示的是第一限位组件221设置的位置与第一端211的距离小于设定值,也可以是第一限位组件221即设置在第一端211处,本实用新型实施例通过将第一限位组件221设置在靠近第一端的位置,在将货物放置在缓存架的状态下,第一限位组件221能够对货物在第一方向的一侧起到抵靠作用,使得第一限位组件221与货物的抵靠作用力能与货物的重力分量相平衡,从而提高缓存架上货物的稳定性。
35.如图3所示,第二限位组件222在竖直方向上相对缓存架21突起,第二限位组件222设置在缓存架21的至少一侧部,其中,侧部为缓存架21在第一方向的两侧。需要说明的是,本实用新型实施例将缓存架21在第一方向上的相对两个位置定义为缓存架21的两端,将缓存架21在垂直第一方向上的相对两个位置定位为缓存架21的两侧。第二限位组件222可以只设置在缓存架21的一个侧部,也可以是第二限位组件222设置有两个,两个第二限位组件222设置在缓存架21的相对两侧,两个第二限位组件222相对的方向与第一方向垂直。本实用新型实施例通过将第二限位组件设置在缓存架的至少一侧部,能够对放置在缓存架上的货物的侧部起到限位作用,可以提高缓存架上货物的稳定性。
36.在一些实施例中,如图3所示,第一限位组件221包括第一延伸部3和第二延伸部4。第一延伸部3沿竖直方向延伸,第一延伸部3在竖直方向的一端与缓存架21连接,第二延伸部4的一端与第一延伸部3的另一端连接,第一延伸部3的另一端为自由端,且第二延伸部4与竖直方向呈第二锐角β设置,第二延伸部4的另一端相对一端远离缓存架21的中心。缓存架21的中心表示的是缓存架21的表面的几何中心,通过将缓存架21的另一端相对一端远离缓存架21的中心,使得第二限位部形成喇叭状结构,在将货物放置在限位区200的过程中,相对竖直方向倾斜的第二延伸部能够对货物的运动起到导向作用,降低货物与限位区对准的难度,从而提高货物准确放置在缓存架的限位区的效率,第一延伸部沿竖直方向延伸,也就是说,在货物放置在限位区的状态下,第一限位部更容易与货物的表面贴合,从而提高第一限位部对货物支撑的稳定性。
37.在一些实施例中,如图3所示,第二锐角β大于等于10度且小于等于45度。本实用新型实施例通过将第一延伸部3与第二延伸部4之间的夹角限定在一定范围内,既能够提高第二延伸部对货物的导向作用,又能够降低货物与限位区对准的难度。
38.在一些实施例中,如图4所示,第二限位组件222包括第一导向件2221和第二导向件2222。第一导向件2221沿第一方向(图4所示上下方向)延伸,第二导向件2222的一端与第一导向件2221靠近第一端211的一端连接,第二导向件2222的延伸方向与第一导向件2221的延伸方向呈第三锐角α设置,其中,延伸方向表示的是第一导向件2221或第二导向件2222的长度方向。第二导向件2222的另一端在第二方向(图4所示左右方向)上相对第二导向件2222的一端远离缓存架21的中心,第二方向垂直第一方向。如图4所示,本实用新型实施例中的第二限位组件222可设置一个第一导向件2221和两个第二导向件2222,其中,两个第二导向件2222设置在第一导向件2221在第一方向的两端,且第二导向件2222相对第一导向件2221倾斜设置,第二导向件2222远离第一导向件2221的一端朝远离缓存架21的中心的方向设置,也就是说,第二导向件2222形成喇叭形。图4所示实施例中设置两个第二限位组件222,两个第二限位组件222对称设置在缓存架21在第二方向的两端(也就是第一方向的两侧),两个第二限位组件222的第二导向件2222之间形成喇叭形,在货物搬运至缓存架的过程中,搬运机构将货物从图4中的上方往下方的方向搬运,货物先接触到第二导向件2222,再接触到第一导向件2221,第二导向件2222能够对货物的搬运起到限位和导向的作用,有利于提高货物搬运的效率。
39.在一些实施例中,第三锐角α大于等于10度且小于等于45度。本实用新型实施例通过将第二导向件与第二二导向件之间的夹角限定在一定范围内,既能够提高第二导向件对货物的导向作用,又能够降低货物与限位区对准的难度。
40.在一些实施例中,如图3所示,第一导向件2221包括第一延伸部3和第二延伸部4,第一延伸部3沿竖直方向延伸,第一延伸部3的一端与缓存架21连接,第一延伸部3的另一端与第二延伸部4连接,第二延伸部4与竖直方向呈第二锐角β设置。本实用新型实施例通过将第一导向件由在竖直方向上相互倾斜的第一延伸部和第二延伸部组成,使得第一导向件不但在周向上能够对货物起到限位作用,还能够在竖直方向上对货物搬运至限位区的过程起到导向作用,以提高货物搬运的效率。
41.在一些实施例中,如图5所示,第二导向件2222包括第一延伸部3和第二延伸部4,第一延伸部3沿竖直方向延伸,第一延伸部3的一端与缓存架21连接,第一延伸部3的另一端与第二延伸部4连接,第二延伸部4与竖直方向呈第二锐角β设置。本实用新型实施例通过将第二导向件由在竖直方向上相互倾斜的第一延伸部和第二延伸部组成,使得第二导向件不但在第一方向上能够对货物起到导向作用,还能够在竖直方向上对货物搬运至限位区的过程起到导向作用,以提高货物与限位区对齐的准确度。
42.在一些实施例中,如图4所示,缓存机构2还包括滚动组件5。滚动组件5与缓存架21可活动地连接,例如滚动组件5可相对缓存架21滚动,或者滚动组件5可相对自身轴线滚动,其中,滚动组件5包括但不限于皮带、滚轮、齿轮及链条。只要滚动组件能够相对缓存架21在第一方向可活动即可。且滚动组件5至少部分突出于限位区200内,滚动组件5突出的方向为竖直方向,可以理解为滚动组件5部分突出缓存架21的表面,本实用新型实施例通过将滚动组件5至少部分突出于限位区内,放置在限位区内的货物能够与滚动组件接触,在货物搬运
的过程中,货物与滚动组件变成了滚动摩擦,降低了货物与缓存架的摩擦力,从而节省了货物搬运的作用力,在节约能源的同时还能提高货物搬运的效率。
43.在一些实施例中,如图1所示,缓存机构2设置有多个,多个缓存机构2在支撑架1的竖直方向(图1所示上下方向)上间隔设置。本实用新型实施例通过增加缓存机构2的数量,能够增加搬运机器人对货物单次缓存的数量,从而提高货物搬运的效率。
44.以上所述,仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1