一种PC构件装配演示用机器人手爪的制作方法
一种pc构件装配演示用机器人手爪
技术领域
1.本实用新型涉及一种pc构件装配演示用机器人手爪,属于建筑行业领域。
背景技术:
2.对于建筑行业预制模台,由于安装放置零件较多,目前在预制模台领域市面上没有这类夹具,在应对工件放置时都是采用人工吊装放置,对工人来说整个装配非常的繁琐,使得装配过程变得复杂,对位精度低,工作效率大大降低。
技术实现要素:
3.本实用新型要解决的技术问题是:对应多个零件时,如何使得装配过程变得简单,提高工作效率的问题。
4.为了解决上述技术问题,本实用新型的技术方案是提供了一种pc构件装配演示用机器人手爪,其特征在于,包括机械臂,机械臂的端部连接快换盘一端,快换盘另一端连接底板的一侧,底板另一侧的两端均设有夹紧气缸,每个夹紧气缸的活动端上分别设有一个夹爪;两个夹爪之间设有磁石,磁石通过伸缩结构与底板另一侧的中间位置连接。
5.优选地,每个所述的夹爪由两个z字形支架组成,两个z字形支架分别固定在夹紧气缸的两个移动端上。
6.优选地,所述的两个z字形支架之间形成凹槽型结构;两个z字形支架的外侧均设有凸起结构。
7.优选地,所述的伸缩结构包括小底板,小底板的两端穿设有两个导向轴,两个导向轴设于底板上,每个导向轴的外侧均套设有一个缓冲弹簧,缓冲弹簧一端顶在小底板上,缓冲弹簧另一端连接在导向轴上;每个导向轴上靠近小底板的一端均设有防止小底板从导向轴上脱出的限位结构。
8.优选地,所述的两个导向轴通过直线轴承与底板另一侧连接。
9.优选地,所述的限位结构为螺栓,螺栓穿过小底板一端的孔并与导向轴一端螺纹连接;螺栓尾端大于小底板端部的孔。
10.与现有技术相比,本实用新型具有以下有益效果:
11.采用本实用新型的机器人手爪后,对于建筑行业预制模台,可以很大程度精简了装配的流程,使得整个过程变得简单便捷,大大的提高了生产装配效率。
附图说明
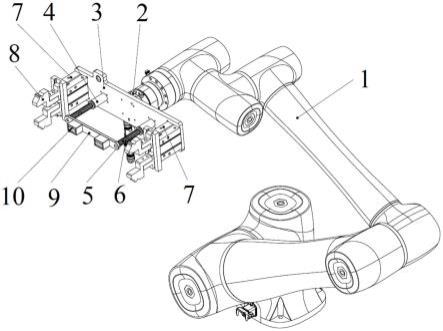
12.图1为一种pc构件装配演示用机器人手爪的整体结构示意图;
13.图2为一种pc构件装配演示用机器人手爪的局部结构示意图。
具体实施方式
14.为使本实用新型更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
15.本实用新型提供了一种pc构件装配演示用机器人手爪,用于演示pc构件在预制生产过程中各个零部件的抓取动作,如图1、图2所示,其包括机械臂1,机械臂1的端部设有快换盘2;快换盘2的一端面上设有螺纹孔,通过螺栓将快换盘2固定在机械臂1上;底板3通过螺栓固定在快换盘2另一端面上;两个直线轴承4通过螺栓连接固定在底板3上;导向轴5通过销轴连接安装在对应的直线轴承4上,一端设有螺纹孔;缓冲弹簧6安装在导向轴5上,并套在导向轴5外侧;两个夹紧气缸7通过螺纹连接固定在底板3上,且位于两个直线轴承4的两侧;夹爪8通过螺纹连接安装在夹紧气缸7上;小底板9的两端分别通过螺栓连接安装在两个导向轴5上,使得小底板9可以沿着两个导向轴5滑动,且与导向轴5一端的螺纹孔螺纹连接;磁石10通过螺栓连接安装在小底板9上,磁石10位于两个夹爪8中间位置,使得两个夹爪8夹取零部件的同时,磁石10能吸住该零部件,提高夹取的作用力,便于夹爪8的夹取。
16.每个夹爪8由两个z字形支架组成,两个z字形支架分别固定在夹紧气缸7的两个移动端上,从而使得两个z字形支架之间可以夹取各个不同的零部件;对于有内孔的结构,可以将夹爪8的两个z字形支架伸入零部件的孔内,从而通过向外撑开的方式固定住零部件。
17.两个z字形支架之间形成凹槽型结构,用于零部件的放置,从而合拢两个z字形支架,即可夹取该零部件。两个z字形支架的外侧均设有凸起结构,便于顶住带内孔零部件,提高撑开的摩擦力。
18.本实施例中,快换盘2固定在底板3的一侧,夹紧气缸7和直线轴承4均固定在底板3的另一侧。夹紧气缸7、直线轴承4在同一直线上。
19.由于夹紧气缸7可以带着夹爪8夹紧或者撑开,所以夹爪8既可以夹紧工件,也可以内撑工件。两个夹爪8之间的位置还设有磁石10,可以吸附各种金属零件。
20.本实用新型的工作过程如下:
21.在夹取工件时,夹紧气缸7通气,使得两个夹爪8张开,机械臂1带着夹具移动到要夹取的工件位置,夹紧气缸7通气,两个夹爪8夹紧工件,机械臂1带着工件移动到预先设定的位置,夹紧气缸7通气,两个夹爪8松开,工件留在设定位置。
22.在内撑工件时,夹紧气缸7通气,使得两个夹爪8收紧,机械臂1带着夹具移动到要夹取的工件位置,夹紧气缸7通气,两个夹爪8内撑工件,机械臂1带着工件移动到预先设定的位置,夹紧气缸7通气,两个夹爪8收紧,工件留在设定位置。
23.在吸附工件时,磁石10断电,使得磁石10磁性消失,机械臂1带着夹具移动到要夹取的工件位置,磁石10通电吸附工件,机械臂1带着工件移动到预先设定的位置,磁石10断电,磁石10失去磁性,工件留在设定位置。
技术特征:
1.一种pc构件装配演示用机器人手爪,其特征在于,包括机械臂(1),机械臂(1)的端部连接快换盘(2)一端,快换盘(2)另一端连接底板(3)的一侧,底板(3)另一侧的两端均设有夹紧气缸(7),每个夹紧气缸(7)的活动端上分别设有一个夹爪(8);两个夹爪(8)之间设有磁石(10),磁石(10)通过伸缩结构与底板(3)另一侧的中间位置连接。2.如权利要求1所述的一种pc构件装配演示用机器人手爪,其特征在于,每个所述的夹爪(8)由两个z字形支架组成,两个z字形支架分别固定在夹紧气缸(7)的两个移动端上。3.如权利要求2所述的一种pc构件装配演示用机器人手爪,其特征在于,所述的两个z字形支架之间形成凹槽型结构;两个z字形支架的外侧均设有凸起结构。4.如权利要求1所述的一种pc构件装配演示用机器人手爪,其特征在于,所述的伸缩结构包括小底板(9),小底板(9)的两端穿设有两个导向轴(5),两个导向轴(5)设于底板(3)上,每个导向轴(5)的外侧均套设有一个缓冲弹簧(6),缓冲弹簧(6)一端顶在小底板(9)上,缓冲弹簧(6)另一端连接在导向轴(5)上;每个导向轴(5)上靠近小底板(9)的一端均设有防止小底板(9)从导向轴(5)上脱出的限位结构。5.如权利要求4所述的一种pc构件装配演示用机器人手爪,其特征在于,所述的两个导向轴(5)通过直线轴承(4)与底板(3)另一侧连接。6.如权利要求4所述的一种pc构件装配演示用机器人手爪,其特征在于,所述的限位结构为螺栓,螺栓穿过小底板(9)一端的孔并与导向轴(5)一端螺纹连接;螺栓尾端大于小底板(9)端部的孔。
技术总结
本实用新型公开了一种PC构件装配演示用机器人手爪,其特征在于,包括机械臂,机械臂的端部连接快换盘一端,快换盘另一端连接底板的一侧,底板另一侧的两端均设有夹紧气缸,每个夹紧气缸的活动端上分别设有一个夹爪;两个夹爪之间设有磁石,磁石通过伸缩结构与底板另一侧的中间位置连接。采用本实用新型的机器人手爪后,对于建筑行业预制模台,可以很大程度精简了装配的流程,使得整个过程变得简单便捷,大大的提高了生产装配效率。大大的提高了生产装配效率。大大的提高了生产装配效率。
技术研发人员:王蔚成 刘鹏 俞骥一 郑凯宇 袁建军
受保护的技术使用者:南通上研机器人技术有限公司
技术研发日:2022.08.26
技术公布日:2023/2/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1