用于确定旋转电机的转子的角位置的装置和包括该装置的组件的制作方法
1.本实用新型涉及用于确定旋转电机的转子的角位置的装置以及包括这种确定装置和这种旋转电机的组件。
背景技术:
2.电机例如是由12v或48v或甚至更高的标称电压供电的交流发电机或起动机-交流发电机。
3.该电机可以集成到混合动力或纯电动车辆中,例如机动车辆中。
4.为了控制该电机,有必要知道电机转子的角位置。为了做到这一点,在三相同步电机的情况下,已知的实践是使用多个霍尔效应传感器,在诸如 clarke或concordia变换的数学变换之后,由产生用于估计转子位置的控制回路的电路来处理这些传感器的信号。该电路在输出处传送表示转子位置的信号。然后,该测量可以例如用于控制置于该电机的定子和车辆车载网络的电能存储单元之间的逆变器/整流器,该电能存储单元特别是电池。
5.在产生控制回路的电路的输出处获得的位置的精度很大程度上取决于由传感器传递的信号的精度。在各个传感器中,信号可以具有不同的一次谐波幅度,并且在各个传感器中,该幅度差距导致谐波出现在产生控制回路的上述电路中。
6.为了克服传感器之间的幅度差距问题,已知的做法是给用于应用上述数学变换的矩阵的系数分配校正上述参数的值。由于这种系数是基于电机的一个运行点的行为一劳永逸地固定的,所以校正并不稳健,并且不适用于电机的整个运行范围。例如,当电机温度变化时,这种校正不再是最佳的。
7.需要通过稳健地改善由产生用于估计转子位置的控制回路的电路接收的信号的质量来克服上述缺点。
技术实现要素:
8.本实用新型旨在满足该需求,并且根据其一方面,本实用新型使用一种用于基于由多个位置传感器传递的信号来确定旋转电机的转子的角位置的装置来实现该需求,该装置包括:
[0009]-产生用于估计转子位置的控制回路的电路,在输出处传递表示转子位置的信号,以及
[0010]-通过源自位置传感器的每个信号的一次谐波的幅度进行动态归一化的电路,
[0011]
该动态归一化电路在输入处接收:
[0012]-源自位置传感器的每个信号,以及
[0013]-表示转子位置的信号的至少一个图像,
[0014]
该动态归一化电路配置成:
[0015]-通过表示转子位置的信号的图像解调源自位置传感器的每个信号,
[0016]-在该解调结束时,确定源自位置传感器的该信号的一次谐波的幅度,以及
[0017]-通过将源自位置传感器的每个信号除以所述先前确定的信号的一次谐波的幅度来归一化该信号。
[0018]
根据本实用新型,源自位置传感器的每个信号因此被动态地归一化,使得产生用于估计转子位置的控制回路的电路处理源自位置传感器的信号,该信号的幅度相对于一次谐波随时间保持恒定。因此,在产生控制回路的电路中产生的谐波减少了,甚至消除了,从而提高表示转子位置的信号的精度。因此,使用表示转子位置的该信号的任何其他控制都得到了改善。
[0019]
源自位置传感器的信号的解调可以同步执行。
[0020]
表示转子位置的信号例如是相对于参考位置的角度值。表示转子位置的信号图像例如是相对于参考位置测量的该角度的余弦和正弦的线性组合。
[0021]
在解调期间,表示转子位置的信号的相同图像可以应用于源自传感器的每个信号。在使用两个以上的传感器来确定转子位置的情况下,例如三个传感器,例如三个霍尔效应传感器,代表性信号的图像可以与前述角度的余弦成比例,或者与该角度的正弦成比例,或者是该角度的余弦和该角度的正弦的线性组合。
[0022]
动态归一化电路可以包括低通滤波器,使得可以从所执行的解调的结果中分离出源自位置传感器的信号的一次谐波的幅度。因此,没有必要在解调的上游提供具有可变截止频率的带通滤波器。
[0023]
低通滤波器可以是二阶的。
[0024]
对于由具有八对极的转子承载的磁性目标,低通滤波器可以具有0.3hz 和50hz之间的截止频率。该截止频率可以是固定的,并且使得可以提取信号的一次谐波的幅度,对于电机的整个运行范围,对该信号应用解调。然后,通过将源自位置传感器的每个信号除以使用前述解调确定的一次谐波的幅度,可以在进行的基础上执行动态归一化电路对所述信号的归一化。
[0025]
作为变型,通过将所述信号除以一次谐波的幅度来执行这种归一化,一次谐波的幅度是仅针对电机的特定运行范围(例如超过转子的最小转速)使用前述解调来确定的。在该最小转速(例如100、200、300、400、500、600 或700rpm)以下,可以通过将信号除以预定的一次谐波幅度值来执行归一化,该一次谐波幅度值例如是为该一次谐波确定的最后幅度值或另一个值,比如为旋转电机的给定运行点计算的值。这个预定的一次谐波幅度值不一定是恒定的。这种基于速度阈值的标准化使得可以避免不得不使用选择性太强的低通滤波器。
[0026]
低通滤波器可以配置成具有取决于转子速度的可变截止频率。当希望提高要确定的一次谐波幅度的精度时,这种配置是合适的。低通滤波器可以具有:
[0027]-第一运行范围,其截止频率高于第一频率阈值,例如当转子的速度低于第一速度阈值(例如2000rpm的量级)时,对于由具有八对极的转子承载的磁性目标为2hz的量级,以及
[0028]-第二运行范围,其截止频率低于第二频率阈值,该第二频率阈值低于第一频率阈值,当转子的速度高于第一速度阈值并且仍具有前述磁性目标时,该第二频率阈值例如为0.5hz的量级。
[0029]
在与刚刚描述的不同的变型中,低通滤波器可以保持在第二运行范围中,即使在第一运行范围之后存在低于第一速度阈值的下降。
[0030]
低通滤波器的第一运行范围的存在使得可以快速提取源自传感器的信号的一次谐波的幅度值。在该第一运行范围的开始,可以在低通滤波器的输入处使用预定的一次谐波幅度值。
[0031]
如已经看到的,贯穿前面的文本,确定装置可以包括用于根据预定条件例如根据电机转子的旋转速度而去激活动态归一化电路的装置。
[0032]
对于源自传感器的每个信号,动态归一化电路可以应用特定于该信号的解调,并通过特定的低通滤波器处理该解调的输出。这些低通滤波器中的每个都可以是相同的。此外,在各个位置传感器中,预定的一次谐波幅度值可以不同。
[0033]
贯穿前文,该装置可以配置为对动态归一化电路的输出处的每个归一化信号应用数学变换,用于将系统特别是三相系统建模为两相系统。这种变换使用例如clarke或concordia矩阵。
[0034]
动态归一化电路布置在产生用于估计转子位置的控制回路的电路的上游。
[0035]
用于对系统建模的数学变换可以由布置在动态归一化电路的输出处和产生用于估计转子位置的控制回路的电路的输入处的块来应用。
[0036]
根据本实用新型的另一方面,本实用新型的另一主题是一种组件,包括:
[0037]-用于推进混合动力或电动车辆的旋转电机,以及
[0038]-用于控制该电机的装置,包括如上定义的确定装置。
[0039]
旋转电机例如是同步电机,例如三相同步电机或其定子电绕组限定双三相系统的同步电机。定子电绕组例如由电线或彼此连接的导电条形成。
[0040]
贯穿前文,转子可以是爪极转子。该转子包括嵌套的第一和第二极轮,第一极轮限定一系列总体形状为梯形的爪,每个爪在第二极轮的方向上轴向延伸,第二极轮限定一系列总体形状为梯形的爪,每个爪在第一极轮的方向上轴向延伸。从周向上来说,永磁体可以容纳在转子的两个连续爪之间。作为变型,转子可以不同于爪极转子,包括例如叠片堆或者是笼型转子。
[0041]
贯穿前文,转子可以包括任意数量的极对,例如六对或八对极。
[0042]
旋转电机可以具有4kw、8kw、15kw、25kw或更高的额定电功率。
[0043]
该旋转电机可以由电能存储单元通过组件的逆变器/整流器供电,根据电机是作为电动机还是作为发电机运行,该逆变器/整流器可以给车辆的车载网络充电或者由该网络供电。
[0044]
电能存储单元的额定电压可以是12v或48v,或者具有另一值,例如高于300v的另一值。
[0045]
旋转电机还可以包括滑轮或连接到车辆动力系其余部分的任何其他装置。电机例如特别是通过皮带连接到车辆内燃机的曲轴上。作为变型,电机连接在传动系的其他位置,例如,从传递到车辆车轮的扭矩的角度来看在齿轮箱的输入处,从传递到车辆车轮的扭矩的角度来看在齿轮箱的输出处,从传递到车辆车轮的扭矩的角度来看在齿轮箱处,或者甚至在该传动系的前轴组件或后轮轴组件上。
[0046]
旋转电机不一定是同步电机,也可能是异步电机。
[0047]
根据本实用新型的另一方面,本实用新型的另一主题是一种基于由多个位置传感器传递的信号来确定旋转电机的转子的角位置的方法,其中使用如前所述的确定装置。
[0048]
之前所述的全部或部分内容也适用于本实用新型的该其他方面。
[0049]
该确定方法例如被集成到用于控制电机的方法中,其中如上确定的转子的角位置用于控制发动机扭矩和/或电能存储单元的电流。
附图说明
[0050]
通过阅读以下对本实用新型的一个非限制性示例性实施方式的描述并研究附图,可以更好地理解本实用新型,其中:
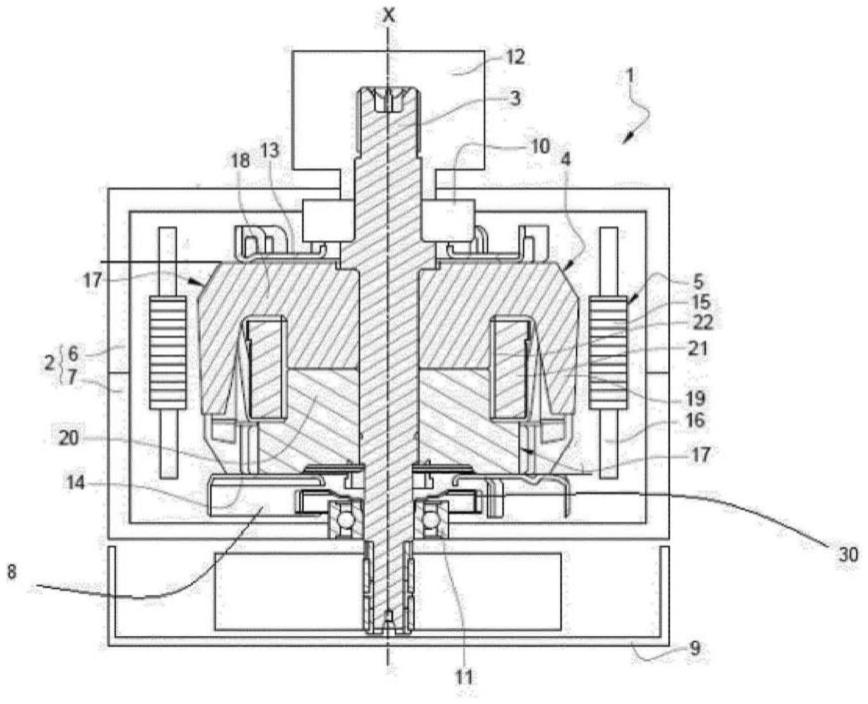
[0051]-图1示意性地示出了本实用新型可以应用的示例性旋转电机的轴向截面图,
[0052]-图2示意性地示出了根据本实用新型的一个非限制性示例性实施方式的用于确定电机转子位置的装置,
[0053]-图3示意性地示出了图2的动态归一化电路,
[0054]-图4示意性地示出了产生用于估计图2的转子位置的控制回路的电路,以及
[0055]-图5示出了取决于施加到电机转子的相同速度设定点的源自位置传感器的信号幅度的多个变化。
具体实施方式
[0056]
图1示出了可以应用本实用新型的多相旋转电机1,特别是用于机动车辆。
[0057]
该旋转电机可以形成车辆的交流发电机或起动机-交流发电机。该旋转电机可以经由包括逆变器/整流器的电力电子部件9由电池供电,该电池的额定电压例如是12v或48v或者具有高于300v的值。
[0058]
旋转电机1包括外壳2。在该外壳2内,它还包括轴3、与轴3一体旋转的转子4和围绕转子4的定子5。转子4的旋转运动围绕轴线x进行。在该示例中,外壳2包括组装在一起的前轴承6和后轴承7。这些轴承6、7在形式上是中空的,并且每个都在中心支承相应的滚珠轴承10、11,用于轴3 的旋转安装。
[0059]
在所考虑的示例中,滑轮12在前轴承6处固定到轴3的前端,例如使用该滑轮的腔底部上的螺母轴承。该滑轮12可以将旋转运动传递到轴3上,并且可以通过皮带连接到车辆内燃机的曲轴上。
[0060]
在这种情况下,轴3的后端带有属于换向器的滑环,并通过电线连接与绕组相连。属于电刷架8的电刷布置成摩擦滑环。
[0061]
前轴承6和后轴承7可以进一步包括用于空气通过的基本横向开口,以便使得旋转电机可以通过由转子4的前背面上(也就是说在前轴承6处)的前风扇13和转子的后背面上(也就是说在后轴承7处)的后风扇14的旋转产生的空气流通来冷却。
[0062]
在该示例性实施例中,定子5包括叠片堆形式的主体15,该主体15设置有例如半封闭或开放类型的凹口,配备有用于安装定子的多相电绕组的凹口绝缘体。每相包括绕组16,绕组16穿过主体15的凹口,并且与所有相一起在定子主体的任一侧形成前束和后束。绕组16例如由覆盖有瓷漆的连续电线获得,或者由棒形式的导电元件获得,例如彼此连接的销。定子的电绕组例如是三相的,然后实现星形或三角形配置,其输出连接到电力电子部件 9。
[0063]
图1的转子4是爪极转子。它包括两个极轮17。第一极轮17面向电力电子部件9,而第二极轮17面向滑轮12。每个极轮17包括在轴线x的任一侧径向延伸的底部18,该轮限定一系列总体形状为梯形的爪19。极轮17的每个爪从布置在底部18的径向外周上的基部沿另一极轮的方向轴向延伸。
[0064]
转子4在径向内部20和爪19之间还包括缠绕在线圈绝缘体22上的线圈。
[0065]
转子4还可以包括永磁体(未示出),该永磁体在转子的外周插入两个相邻的爪19之间。作为变型,转子4可以没有这种永磁体。
[0066]
可以有由转子4限定的任意数量的极对,例如六对或八对。
[0067]
该电机还包括用于测量转子4的位置的传感器,例如三个霍尔效应传感器,它们一起组合在由塑料制成的同一壳体中。这些传感器例如定位在电机的后轴承7处,并且它们与磁性目标30相互作用,该磁性目标30与转子一体旋转。在将要描述的示例中,该磁性目标30限定了八对极。
[0068]
由这些传感器传递的测量被电路100用于确定转子4的角位置,现在将参照图2至图4对其进行描述。
[0069]
以已知的方式,电路100包括对由每个位置传感器获取的信号s1至s3 进行离散化的块101。
[0070]
在该块101的输出处,源自传感器并已被离散化的各种信号攻击动态归一化电路102,该电路还在输入处接收表示转子位置的信号图像。在这种情况下,该图像是相对于该转子的参考位置测量的角度θ的余弦和正弦的线性组合,该角度的时间导数对应于该转子4的转速。
[0071]
在所考虑的示例中,在动态归一化电路102的输入处接收的源自传感器的每个离散信号首先在105中通过减去零误差进行校正。然后,在106中,通过转子角度的余弦和正弦的线性组合,对如此校正的信号进行同步和相干解调。
[0072]
从该解调得到的信号xi然后进入低通滤波器107,在所考虑的示例中,低通滤波器107具有可变截止频率。在第一运行范围中,例如对于0rpm和 2000rpm之间的转子速度,在所考虑的示例中,该滤波器107的截止频率在 2hz和50hz之间。在第二运行范围内,例如对于高于2000rpm的转子速度,在所考虑的示例中,滤波器的截止频率为0.5hz的量级。
[0073]
低通滤波器107的另一输入对应于在动态归一化电路102的输入处接收的信号的一次谐波的预定幅度值x0i。该值x0i可以在第一运行范围开始时被低通滤波器107用作输入数据。
[0074]
在低通滤波器107的输出处,对于每种上述操作模式,可以从解调信号中提取在动态归一化电路102的输入处接收的信号的一次谐波值。
[0075]
相移补偿和饱和分别由相应的块110和111应用于在动态归一化电路 102的输入处接收的信号的一次谐波的该幅度,并且在选择器115的输入处接收所得信号。该选择器还通过输入116接收控制信号,以及通过另一输入 117接收也在滤波器107的输入处接收的一次谐波的幅度的预定值。
[0076]
根据情况,经由输入116处的控制信号,可以在选择器115的输出处施加:
[0077]-由解调操作产生的在电路102的输入处接收的信号的第一幅度值,或者
[0078]-所述信号的该一次谐波的预定第一幅度值x0i。
[0079]
然后,选择器115的输出处的该值用于归一化在电路102的输入处接收的信号,块120将在电路102的输入处接收的该信号除以在选择器115的输出处存在的该信号的一次谐波幅度值。
[0080]
上面刚刚描述的内容被并行应用于源自用于感测电机转子位置的传感器的每个信号。
[0081]
在电路102的输出处如此获得的信号在块122的输入处被接收,块122 执行数学变换以将该系统(其在该示例中是三相的)建模为两相系统。这种变换使用例如clarke或concordia矩阵。当位置传感器的数量不同于3时,可以使用其他变换。
[0082]
该块122的输出处的信号在电路130的输入处被接收,电路130产生用于控制转子4位置的控制回路,在输出处传递表示转子4位置的信号,该位置是前述角度θ。该电路130通过块131将块122的输出处的正弦信号调制成角度θ的余弦,并且该电路130还通过块132将块122的输出处的余弦信号调制成角度θ的正弦。在校正器135的输入处接收块131和132的输出处的信号之间的差值。校正器135的输出传递转子4的旋转速度,转子4传递电路130的另一输出,并且该旋转速度进入电路130的积分器136,以便获得角度θ。
[0083]
如此获得的速度和角度值可以用于控制旋转电机1。
[0084]
图5在同一曲线图上示出了在转子4从0转到10000rpm的速度提升210 期间源自位置传感器的多个响应。
[0085]
曲线200表示由根据现有技术的传感器在确定装置100的上游响应于该速度提升而传递的信号。
[0086]
曲线201表示响应于该速度提升的一次谐波的该振幅的实际值。
[0087]
曲线202表示响应于该速度提升的该信号的一次谐波的幅度,如使用上述电路102确定的。
[0088]
可以观察到,尽管曲线200既不快速也不稳定也不精确,但曲线202从低速开始跟随曲线201,尽管存在诸如偏移和其他谐波的干扰。
[0089]
本实用新型不限于刚刚描述的示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1