一种用以夹持车身的抓手的制作方法
1.本实用新型涉及一种用以夹持车身的抓手,属于自动化制造技术领域。
背景技术:
2.随着科技进步,在现代汽车制造业中,整体压铸成型车身技术能极大的简化部件及工艺流程,极大的提高生产效率,因此开始被广泛的应用于生产中。在自动生产线中,现有技术都是通过机械手的抓手夹持车身压铸件上的加强筋以运送车身压铸件,但由于车身压铸件的有些部位的加强筋的筋位较小,普通的抓手无法抓取,因此为了保证压铸件抓取的稳定性,通常都是采用夹手直接夹持车身,但是由于压铸机中取出的车身压铸件温度较高,现有的金属抓手会刮伤车身,甚至导致车身变形,而塑料抓手不耐高温,易融化沾粘在车身压铸件上,从而影响车身压铸件的后续加工。此外,传统抓手与机械手的连接臂为直臂,在机械手使用此类抓手伸入压铸机内时,机械手需要弯折一定角度以使抓手与车身压铸件抓取位置对准,从而抓取车身压铸件,导致机械手抓取车身压铸件动作繁琐,效率低。
技术实现要素:
3.本实用新型的目的在于提供一种用以夹持车身的抓手,其不会损伤车身,同时简化了机械手抓取动作。
4.为达到上述目的,本实用新型提供如下技术方案:一种用以夹持车身的抓手,包括:
5.机械手连接臂,与机器人连接;
6.夹爪连接板,连接在机械手连接臂上;
7.若干夹爪组件,设置在所述夹爪连接板的底部,所述夹爪组件夹持压铸件;
8.若干传感器,设置在所述夹爪连接板的底部,所述传感器检测压铸件的完整性;及
9.控制阀岛;安装在所述夹爪连接板上,控制所述传感器和夹爪组件工作;
10.其中,所述机械手连接臂为45
°
弯管法兰,所述弯管法兰的弯管处设置有若干加强块;
11.所述夹爪组件包括连接臂、夹爪气缸和两个夹手,所述连接臂连接在所述夹爪连接板上,所述夹爪气缸安装在连接臂的端部,两个所述夹手安装在夹爪气缸的输出轴上,所述夹爪气缸驱动两个所述夹手相对移动以夹紧或松开压铸件,所述夹手包括夹手基座和夹齿,所述夹手基座为l形块,所述夹手基座安装在所述输出轴上,所述夹齿可拆卸地安装在夹手基座上,所述夹齿的上设置有齿锯面,所述夹手包括筋位夹手和车身夹手,所述筋位夹手的两个夹手基座贴合时组成t字形,两个所述两个夹手基座的竖直方向的一端向端部逐渐缩小,所述筋位夹手的两个夹齿贴合时组成箭头形;所述车身夹手的两个夹手基座贴合时组成门字形,所述车身夹手的夹齿为pi耐高温块。
12.进一步地,所述pi耐高温块为梯形块,所述梯形块的上表面与所述夹手基座紧贴配合,所述梯形块的下表面为锯齿面。
13.进一步地,所述夹爪连接板与所述机械手连接臂之间设置有连接座,所述连接座两端分别连接两条长条加强筋,所述长条加强筋底部连接在所述夹爪连接板上表面。
14.进一步地,所述控制阀岛包括电动控制阀和气动控制阀,所述连接座的两端的侧面分别与两条长条加强筋及夹爪连接板围设形成安装腔,其中一个所述安装腔内容设电动控制阀,另一个所述安装腔内容设气动控制阀,所述电动控制阀控制传感器检测压铸件,所述气动控制阀控制所述夹爪气缸驱动两个所述夹手夹紧或松开压铸件。
15.进一步地,所述安装腔套设防护罩,所述电动控制阀上的防护罩上开设有快插接头,所述快插接头与电动控制阀电连接。
16.进一步地,所述夹爪连接板和连接座上设置有若干圆形镂空孔。
17.进一步地,所述传感器通过传感器安装板安装在夹爪连接板上,所述传感器外套设有传感器防护罩。
18.本实用新型的有益效果在于:本技术通过多组夹爪组件配合出去车身压铸件的筋位和车身,从而实现稳定抓取压铸件,通过采用pi耐高温塑料制作的夹齿夹持车身,pi耐高温塑料的硬度小于车身压铸件,有效避免了夹齿与车身压铸件硬碰硬从而使车身变形或刮花。此外,通过45
°
弯管法兰连接抓手与机械手,简化了机械手抓取车身压铸件的动作,提高了工作效率。
19.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
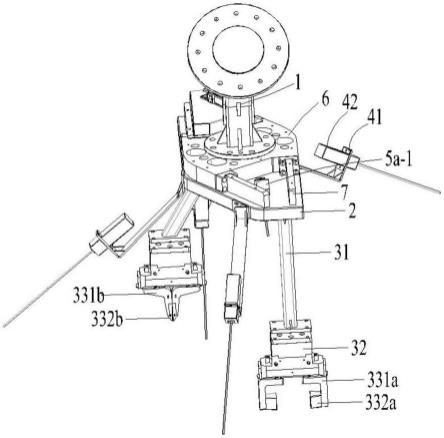
20.图1为本技术一较佳实施例所示一种用以夹持车身的抓手的结构图。
21.图2为图1中抓手的轴侧图。
具体实施方式
22.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
23.请参照图1至图2,本技术一较佳实施例所示一种用以夹持车身的抓手包括:机械手连接臂1、夹爪连接板2、若干夹爪组件3、若干传感器4及控制阀岛5。机械手连接臂1与机器人连接,夹爪连接板2连接在机械手连接臂1上。若干夹爪组件3设置在夹爪连接板2的底部,夹爪组件3夹紧或松开压铸件。若干传感器4设置在夹爪连接板2的底部,传感器4检测压铸件的指定位置。控制阀岛5安装在夹爪连接板2上,控制阀岛5控制传感器4和夹爪组件3工作。具体的,控制阀,5与机器人控制系统电连接,控制阀岛5控制传感器4和夹爪组件3工作并反馈传感器4的检测信号给控制系统。
24.其中,机械手连接臂1为45
°
弯管法兰,45
°
弯管法兰1的弯管处设置有若干加强块11。具体的,45
°
弯管法兰1为矩形弯管法兰,矩形弯管法兰1的弯管处的侧面设置有四个加强块11,以增强矩形弯管法兰1弯管处的强度。
25.夹爪组件3包括连接臂31、夹爪气缸32和两个夹手33,连接臂31连接在夹爪连接板2上,夹爪气缸32安装在连接臂31的端部,两个夹手33安装在夹爪气缸32的输出轴上,夹爪
气缸32驱动两个夹手33相对移动以夹紧或松开压铸件,夹手33包括夹手基座331和夹齿332,夹手基座331为l形块,夹手基座331安装在输出轴上,夹齿332可拆卸地安装在夹手基座331上,夹齿332的上设置有齿锯面,夹手33包括筋位夹手33b和车身夹手33a,筋位夹手33b的两个夹手基座331b贴合时组成t字形,两个夹手基座331b的竖直方向的一端向端部逐渐缩小,筋位夹手33b的两个夹齿332b贴合时组成箭头形;车身夹手33a的两个夹手基座331a贴合时组成门字形,车身夹手33a的夹齿332a为pi耐高温块。
26.在本实施例中,传感器4共有五个,五个传感器4按照压铸件的指定位置对应安装在夹爪连接板2的底部和周侧,夹手33共有三组,其中筋位夹手33b有两个,车身夹手33a数量为1个,筋位夹手33b夹持车身压铸件的筋位,车身夹手33a夹持车身压铸件的车身,车身夹手33a、筋位夹手33b分别对应压铸件抓取的位置安装在夹爪连接板2的底部和侧边上。筋位夹手33b的向端部逐渐缩小的夹手基座331b及贴合组成箭头形的夹齿331b便于夹手33插入压铸件的筋位的两侧,从而减少与压铸件其他部位的碰撞,以保护压铸件。
27.在本实施例中,pi耐高温块331a为梯形块,梯形块331a的上表面与夹手基座紧贴配合,梯形块331a的下表面为锯齿面。具体的pi耐高温块331a为pi耐高温塑料,具体为聚酰亚胺,聚酰亚胺具备耐磨、高负荷能力和尺寸稳定性等特性,同时自身硬度低于压铸件,在夹持压铸件时不会损坏压铸件,其中聚酰亚胺为现有材料,在此不做详细赘述。
28.为了提高夹爪连接板2的强度,在本实施例中,夹爪连接板2与机械手连接臂1之间设置有连接座6,连接座6两端分别连接两条长条加强筋7,长条加强筋7底部连接在夹爪连接板2上表面。
29.为了方便控制传感器4和夹手33工作,在本实施例中,控制阀岛5包括电动控制阀岛5b和气动控制阀岛5a,连接座6的两端的侧面分别与两条长条加强筋7及夹爪连接板2围设形成安装腔,其中一个安装腔内容设电动控制阀岛5b,另一个安装腔内容设气动控制阀岛5a,电动控制阀岛5b控制传感器4检测压铸件的指定位置,气动控制阀岛5a控制夹爪气缸32驱动两个夹手33夹紧或松开压铸件。具体的,控制阀岛5为现有技术中的集成电气控制元件,电动控制阀岛5b为电动控制阀(未图示),电动控制阀与机械手的控制系统电连接,电动控制阀5b接来自机械手的控制系统的收控制命令并反馈传感器4检测结果给控制系统,气动控制阀岛5a内设置有气动控制阀5a,气动控制阀5a-1控制夹爪气缸32驱动两个夹手33夹紧或松开压铸件。气动控制阀5a和电动控制阀为现有技术,在此不做详细赘述。
30.为了方便电动控制阀5b与机械手的控制系统连接,在本实施例中,安装腔套设防护罩51,电动控制阀5b上的防护罩上开设有快插接头5b-1,快插接头5b-1与电动控制阀电连接。
31.为了减轻整个抓手的自重,在本实施例中,夹爪连接板2和连接座6上设置有若干圆形镂空孔。
32.为了防止传感器4被磕碰损坏,在本实施例中,传感器4通过传感器安装板41安装在夹爪连接板2上,传感器4外套设有传感器防护罩42。
33.工作原理:由机械手控制抓手伸入压铸机内并控制3个夹爪组件的夹手33移动到压铸件的筋位和车身的两侧,通过气动控制阀5a-1控制3个夹爪气缸32驱动夹手33夹紧压铸件,再通过机械手带动抓手将压铸件移出压铸机,在此过程中,通过电动控制阀控制传感器4开始工作,检测传感器4检测指定位置的压铸件并反馈给电动控制阀,再由电动控制阀
反馈给器械手控制系统,控制系统根据反馈信号判断压铸件是否完整,若是压铸件结构完整,则继续下一步加工;若压铸件不完整,则发出报警信号,已提示工人对压铸机进行清理。
34.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
35.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1