牵引装置以及牵引系统的制作方法
1.本实用新型涉及机械设备技术领域,特别是涉及了一种牵引装置以及牵引系统。
背景技术:
2.在诸如光纤、电缆等产品的生产过程中,通常需要利用牵引装置对作为待牵引件的光纤/电缆进行牵引,进而对牵引后的产品进行收绕。以光纤为例,当光纤预制棒在拉丝塔热熔下以细丝状态被拉制成形后,光纤牵引装置对光纤进行牵引,进而利用收卷装置对光纤进行收绕以存储到收纤盘上。
3.目前,现有的光纤牵引装置是利用无缝的皮带完成光纤传递及牵引的。在皮带张力一定的情况下,光纤与皮带之间存在相互作用的摩擦力。以当皮带传动时,能够利用光纤和皮带之间的摩擦力使得光纤保持停靠于皮带,随着皮带向目标方向移动。
4.容易理解的,当皮带较新未经过长时间使用时,皮带表面较为平整且清洁,有利于皮带与光纤之间保持可靠的摩擦力,光纤与皮带不易脱离。然而,当皮带经过一段时间的使用之后,容易出现疲劳失效、张力变化而影响摩擦力变化等情况,此时再将光纤利用皮带进行牵引时,容易出现光纤相对皮带滑动的情况,可能导致光纤受力不均匀,进而出现影响光纤强度、光纤段差等问题,在套塑、绞合、护套等阶段增加光纤生产成本。并且,出于成本考虑,一般更换皮带的周期较长,因此,容易光纤长时间利用存在使用痕迹的皮带牵引光纤的情况,光纤的良品率较低,进而导致生产成本增加。
技术实现要素:
5.有鉴于此,本实用新型的目的是提供一种牵引装置以及牵引系统,能够通过调节待牵引件的输送方向以调节待牵引件所承受的牵引力,有利于保持待牵引件表面受力均匀,并且能够简化牵引装置的结构。
6.为达到上述目的,本实用新型采用的技术方案是:提供一种牵引装置。该牵引装置包括驱动件、传动轮组件、导向组件以及活动组件。传动轮组件与驱动件传动连接,用于带动与其接触的待牵引件;待牵引件绕设于导向组件,用于在导向组件处改变待牵引件的输送方向;导向组件和传动轮组件中的一者设于活动组件,活动组件可带动导向组件与传动轮组件相对移动,使待牵引件的输送方向改变,以改变待牵引件所承受的牵引力。
7.在本实用新型的一实施例中,传动轮组件包括主动轮,与驱动件的输出端传动连接;牵引装置包括第一侧、第二侧、第三侧以及第四侧,第一侧与第二侧相对,第三侧与第四侧相对;第一侧与第二侧的相对方向、第三侧与第四侧的相对方向、驱动件与主动轮的相对方向相互垂直;导向组件包括导向件,导向件位于主动轮的上游侧,且相对主动轮靠近第一侧;待牵引件绕设于导向件靠近第四侧的一侧,经导向件后的输送方向为朝向第二侧和第三侧移动,以绕设于主动轮靠近第三侧的一侧;活动组件与导向件连接以带动导向件沿预设方向移动,改变待牵引件的入牵角度;预设方向平行于第一侧与第二侧的方向,入牵角度为导向件与主动轮之间的待牵引件与第一参考线之间的角度;第一参考线的延伸方向平行
于第一侧和第二侧的相对方向。
8.在本实用新型的一实施例中,入牵角度与待牵引件所承受的牵引力为反比关系;导向件为导向轮;导向轮设有限位槽,待牵引件可移动地嵌入限位槽。
9.在本实用新型的一实施例中,传动轮组件还包括第一传动轮;第一传动轮设于导向件的上游侧,且相对导向件靠近第一侧以及第三侧。
10.在本实用新型的一实施例中,第一传动轮与第二参考线相切,主动轮与第二参考线相切;第二参考线的延伸方向平行于第三侧与第四侧的相对方向;第一传动轮位于第二参考线朝向第一侧的一侧,主动轮位于第二参考线朝向第二侧的一侧。
11.在本实用新型的一实施例中,传动轮组件还包括第二传动轮,第二传动轮设于主动轮的下游侧,待牵引件绕设于第二传动轮靠近第四侧的一侧;第一目标点相对第二目标点靠近第三侧,用于增大待牵引件的缠绕角度;第一目标点为主动轮最靠近第三侧的点,第二目标点为第二传动轮最靠近第三侧的点,缠绕角度为待牵引件绕设于主动轮的部分与主动轮的圆心所形成扇面的圆心角。
12.在本实用新型的一实施例中,第三目标点与第四目标点的相对方向平行于第一侧和第二侧的相对方向;第三目标点为主动轮最靠近第四侧的点,第四目标点为第二传动轮最靠近第四侧的点。
13.在本实用新型的一实施例中,牵引装置还包括牵引台,传动轮组件以及导向组件设于牵引台的同一侧;活动组件包括连接件以及活动件,连接件设于牵引台,活动件可移动地设于连接件远离牵引台的一侧。
14.在本实用新型的一实施例中,连接件包括连接部以及弯折部,连接部设于牵引台,与活动件相对且间隔设置,连接部与活动件通过弯折部连接;弯折部设有轴孔;活动组件还包括活动驱动件,活动驱动件可移动地穿设于轴孔,与活动件连接,以带动活动件相对连接件移动。
15.为达到上述目的,本实用新型采用的又一技术方案是:提供一种牵引系统。该牵引系统包括收卷装置以及如上述任一项实施例中的牵引装置,收卷装置设于牵引装置的下游侧,待牵引件自牵引装置伸出,收绕于收卷装置。
16.区别于现有技术,本实用新型利用驱动件驱动传动轮组件带动待牵引件移动,有效减小光纤与传动过程中与牵引装置的接触面积,有利于减小光纤与牵引装置之间的摩擦力,还有利于保持待牵引件表面受力均匀。并且,本实用新型中会利用导向组件改变待牵引装置的输送方向,并且导向组件与传动轮组件可以相对移动,进一步对待牵引件的输送方向进行控制。如是,可以通过改变待牵引件的输送方向的形式,改变待牵引件所承受的牵引力;这意味着,在牵引过程可以根据待牵引件的情况调节其输送方向,调节待牵引件所承受的力,以有利于保证待牵引件的品质。并且,本实用新型能够简化牵引装置的结构,有利于降低成本。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提
下,还可以根据这些附图获得其他的附图。
18.图1是本实用新型牵引系统一实施例中的结构示意图;
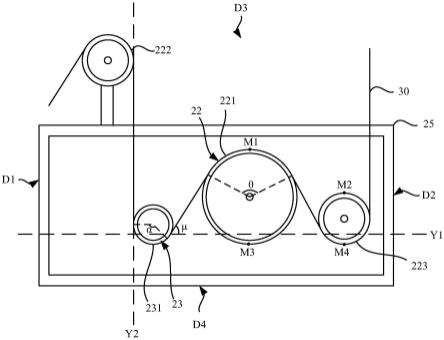
19.图2是本实用新型牵引装置省略驱动件一实施例的正视结构示意图;
20.图3是本实用新型驱动件、活动组件、导向组件以及牵引台一实施例的侧视结构示意图;
21.图4是本实用新型导向件一实施例的结构示意图;
22.图5是图4所示导向件沿a-a方向的剖面结构示意图。
具体实施方式
23.下面将通过具体实施方式对本实用新型的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.为解决现有技术中待牵引件所受牵引力不均匀而影响待牵引件品质的技术问题,本实用新型提供一种牵引装置以及牵引系统。其中,牵引装置包括驱动件、传动轮组件、导向组件以及活动组件。传动轮组件与驱动件传动连接,用于带动与其接触的待牵引件。待牵引件绕设于导向组件,用于在导向组件处改变待牵引件的输送方向。导向组件和传动轮组件中的一者设于活动组件,活动组件可带动导向组件与传动轮组件相对移动,使待牵引件的输送方向改变,以改变待牵引件所承受的牵引力。以下对本实用新型进行详细阐述。
25.请参阅图1,图1是本实用新型牵引系统一实施例中的结构示意图。
26.在一实施例中,牵引系统包括收卷装置10以及牵引装置20。收卷装置10设于牵引装置20的下游侧,待牵引件30经牵引装置20进行牵引后伸出,收卷装置10能够对伸出于牵引装置20的待牵引件30进行收绕以及存储。其中,待牵引件30可以是光纤等。
27.以下对本实用新型牵引装置进行阐述。
28.请参阅图1至图3,图2是本实用新型牵引装置省略驱动件一实施例的正视结构示意图,图3是本实用新型驱动件、活动组件、导向组件以及牵引台一实施例的侧视结构示意图。
29.在一实施例中,牵引装置包括驱动件21、传动轮组件22、导向组件23以及活动组件24。
30.顾名思义,驱动件21能够起到驱动其他部件的作用。结合待牵引件30、牵引装置以及牵引系统的体积、重量等因素,驱动件21可以选择液压驱动、气动驱动、电动驱动等,在此不做限定。
31.传动轮组件22与驱动件21传动连接。当驱动件21驱动传动轮组件22运作时,传动轮组件22能够带动与其接触的待牵引件30移动,完成对待牵引件30的牵引。
32.导向组件23能够改变绕设于其的待牵引件30的输送方向,输送方向是指待牵引件30经导向组件23而输至传动轮组件22的方向。也就是说,待牵引件30绕设于导向组件23,以在导向组件23处改变待牵引件30的输送方向。其中,随着传动轮组件22牵引带动待牵引件30,待牵引件30能够带动导向组件23随之运动;亦或是,导向组件23固定,待牵引件30能够相对导向组件23运动,在此不做限定。
33.活动组件24能够起到相对其他部件运动的作用。导向组件23和传动轮组件22中的一者设于活动组件24。也就是说,可以是导向组件23设于活动组件24,以能够相对传动轮组件22移动;亦或是,可以是传动轮组件22设于活动组件24,以能够相对导向组件23移动。
34.由活动组件24带动导向组件23与传动轮组件22发生相对移动,以此使得待牵引件30的输送方向发生改变,进而待牵引件30所承受的牵引力也随输送方向的改变而发生改变。
35.由此可见,在本实施例中,传动轮组件22带动待牵引件30移动,能够有效减小光纤与传动过程中与牵引装置的接触面积,减小光纤与牵引装置之间的摩擦力,还有利于保持待牵引件30表面受力均匀。并且,在牵引过程可以根据待牵引件30的情况,调节导向组件23与传动论组件之间的相对位置,使得待牵引件30的输送方向改变,以调节待牵引件30所承受的力,进而有利于保证待牵引件30的品质。并且,本实施例中牵引装置的结构简洁,有利于降低成本。
36.请继续参阅图2以及图3。在一实施例中,传动轮组件22包括主动轮221。主动轮221与驱动件21的输出端传动连接,驱动件21能够驱动主动轮221转动,利用主动轮221与绕设于其的待牵引件30之间的摩擦力,主动轮221能够带动待牵引件30移动。
37.牵引装置包括第一侧d1、第二侧d2、第三侧d3以及第四侧d4,第一侧d1与第二侧d2相对,第三侧d3与第四侧d4相对;第一侧d1与第二侧d2的相对方向、第三侧d3与第四侧d4的相对方向、驱动件21与主动轮221的相对方向相互垂直。
38.导向组件23包括导向件231,导向件231位于主动轮221的上游侧,上游侧是指待牵引件30经导向件231而伸入主动轮221。并且,导向件231相对主动轮221靠近第一侧d1。
39.待牵引件30绕设于导向件231靠近第四侧d4的一侧,经导向件231后的输送方向为朝向第二侧d2和第三侧d3移动,以绕设于主动轮221靠近第三侧d3的一侧。
40.活动组件24与导向件231连接以带动导向件231沿预设方向x移动,改变待牵引件30的入牵角度μ。其中,预设方向x平行于第一侧d1与第二侧d2的方向,入牵角度μ为导向件231与主动轮221之间的待牵引件30与第一参考线y1之间的角度;第一参考线y1的延伸方向平行于第一侧d1和第二侧d2的相对方向。其中,入牵角度μ用于表示待牵引件30的输送方向。
41.其中,入牵角度μ与待牵引件30所承受的牵引力为反比关系。也就是说,随着入牵角度μ增大,待牵引件30所承受的牵引力则减小;反之,随着入牵角度μ减小,待牵引件30所承受的牵引力则增大。
42.待牵引件30绕设于主动轮221时还具有包绕角度α。包绕角度α是指,待牵引件30绕设于主动轮221的部分与主动轮221的圆心所形成扇面的圆心角。入牵角度μ增大时,包绕角度α减小;入牵角度μ减小时,包绕角度α增大。
43.以下对入牵角度μ与待牵引件30所承受的牵引力为反比关系进行具体分析,根据欧拉公式,为满足待牵引件30受牵引而进行传动的条件,包绕角度α与待牵引件30受力情况应满足以下公式:
[0044][0045]
其中,t1是指待牵引件30所受正向牵引力,即朝向主动轮221方向的牵引力;t2是指
反向牵引力;f是指待牵引力与导向件231之间的摩擦力;α是指t1、t2作用在导向件231的切点与导向件231圆心连线之间的角度,相当于包绕角度α。
[0046]
根据公式1-1可知,当包绕角度α增大时,正向牵引力随之增大,即待牵引件30所承受的牵引力增大。这意味着,当活动组件24带动导向件231沿预设方向x移动时,若入牵角度μ增大,则包绕角度α减小,待牵引件30所承受的牵引力减小;若入牵角度μ减小,则包绕角度α增大,待牵引件30所承受的牵引力增大。可见,入牵角度μ与待牵引件30所承受的牵引力为反比关系。
[0047]
可选地,入牵角度μ可以处于45
°‑
60
°
之间,以有利于产生合理的牵引力,且降低拉断待牵引件30的风险。当入牵角度μ过大时,牵引装置所作用于待牵引件30的牵引力过小,容易对待牵引件30的质量造成影响;而当入牵角度μ过小时,牵引装置作用于待牵引件30的牵引力过大,容易出现拉断待牵引件30的情况。
[0048]
例如,入牵角度μ可以是45
°
、50
°
、52.5
°
、57
°
、60
°
,在此不做限定。
[0049]
请继续参阅图2以及图3。在一实施例中,传动轮组件22还包括第一传动轮222。第一传动轮222设于导向件231的上游侧,且相对导向件231靠近第一侧d1以及第三侧d3。
[0050]
第一传动轮222能够延长待牵引件30的牵引路径。以待牵引件30为光纤为例,第一传动轮222能够延长光纤的牵引路径,进一步释放光纤拉丝塔搓动装置产生的扭转张力,降低光纤偏移或扭转的风险,进而有效降低光纤断纤率,提高光纤的良品率。
[0051]
可选地,第一传动轮222与第二参考线y2相切,主动轮221与第二参考线y2相切;第二参考线y2的延伸方向平行于第三侧d3与第四侧d4的相对方向;第一传动轮222位于第二参考线y2朝向第一侧d1的一侧,主动轮221位于第二参考线y2朝向第二侧d2的一侧。
[0052]
请继续参阅图2以及图3。在一实施例中,传动轮组件22还包括第二传动轮223,第二传动轮223设于主动轮221的下游侧,待牵引件30绕设于第二传动轮223靠近第四侧d4的一侧。第二传动轮223用于增大待牵引件30的缠绕角度θ,以有利于保证待牵引件30与传动轮组件22之间的摩擦力,降低光纤相对传动轮组件22滑动的风险。缠绕角度θ是指,待牵引件30绕设于主动轮221的部分与主动轮221的圆心所形成扇面的圆心角。
[0053]
具体地,第一目标点m1相对第二目标点m2靠近第三侧d3。其中,第一目标点m1为主动轮221最靠近第三侧d3的点,第二目标点m2为第二传动轮223最靠近第三侧d3的点。
[0054]
可选地,第三目标点m3与第四目标点m4的相对方向平行于第一侧d1和第二侧d2的相对方向。第三目标点m3为主动轮221最靠近第四侧d4的点,第四目标点m4为第二传动轮223最靠近第四侧d4的点。在一替代实施例中,第三目标点m3与第四目标点m4的相对方向也可以无需平行于第一侧d1和第二侧d2的相对方向,在此就不再赘述。
[0055]
如图2中所举例展示的,在一实施例中,传动轮组件22可以同时包括主动轮221、第一传动轮222以及第二传动轮223。待牵引件30在伸入牵引装置后,依次经过第一传动轮222、导向件231、主动轮221以及第二传动轮223后伸出。
[0056]
请参阅图2至图5,图4是本实用新型导向件一实施例的结构示意图,图5是图4所示导向件沿a-a方向的剖面结构示意图。
[0057]
导向件231为导向轮2311,当主动轮221转动以牵引待牵引件30朝向收卷装置10移动时,导向轮2311能够随之转动,减少待牵引件30所受的摩擦力,降低待牵引件30被磨损的风险。
[0058]
进一步地,导向轮2311设有朝向导向轮2311圆心凹陷的限位槽2312,待牵引件30可移动地嵌入限位槽2312,以有利于待牵引件30可靠地停靠于导向轮2311,降低待牵引件30与导向轮2311脱离的风险。
[0059]
可选地,限位槽2312可以是“v”形槽,限位槽2312的角度可以处于90
°‑
120
°
之间,以能够提供足以牵引待牵引件30所需的摩擦力,同时待牵引件30具有活动空间,有利于减少对待牵引件30所造成的磨损。并且,限位槽2312处于该角度范围时,易于加工,且加工精度更加准确。限位槽2312的角度在90
°‑
120
°
的范围内时,随着位槽的角度增大,待牵引件30与限位槽2312之间的接触应力减小。该角度范围对应的接触应力既足以提供待牵引件30被牵引时所需要的摩擦力,降低待牵引件30打滑的风险,同时也不会对光纤造成剧烈磨损,减少缩短光纤的使用寿命的情况。
[0060]
当限位槽2312的角度过大时,待牵引件30绕设于导向轮2311时仍具有较大的活动范围,容易出现待牵引件30“打滑”的情况;当限位槽2312的角度过小时,待牵引件30绕设于导向轮2311时,限位槽2312的槽壁可能与待牵引件30过盈配合,容易出现过度夹持待牵引件30而导致损伤待牵引件30的情况。
[0061]
例如,限位槽2312的角度可以是90
°
、97.5
°
、105
°
、112.5
°
、120
°
,在此不做限定。
[0062]
限位槽2312的槽口至远离槽口的槽底的高度可以处于4mm-6mm之间。其中,槽底相对槽口更靠近导向轮2311的圆心。例如,限位槽2312的高度可以是4mm、4.5mm、5mm、5.5mm、6mm,在此不做限定。
[0063]
前文中所阐述的限位槽2312的角度和高度,适应直径为125微米的光纤(即待牵引件30)。这意味着,当待牵引件30的直径不同时,可以对限位槽2312的角度和高度进行适应性调整。
[0064]
可选地,导向轮2311的轮面直径可以处于120mm-160mm之间,有利于待牵引件30以适应的牵引力伸入导向轮2311,且便于待牵引件30自第一传动轮222伸入导向轮2311。当导向轮2311的轮面直径过大时,待牵引件30初始承受的牵引力可能过高,容易出现待牵引件30粗细不均甚至被拉断的风险;当导向轮2311的轮面过小时,待牵引件30初始承受的牵引力可能过低,且加工困难容易导致成本上升。
[0065]
例如,导向轮2311的轮面可以是120mm、130mm、140mm、150mm、160mm,在此不做限定。其中,导向轮2311可以选择铝合金材质,还可以在导向轮2311表面进行阳极氧化处理。表面阳极氧化处理的铝合金导向轮2311,具有密度低、成本低、加工工艺简单、周期短等优势。此外,导向轮2311表面光滑,不易损伤待牵引件30,导向轮2311表面阳极氧化处理,能够有效提高导向轮2311的硬度,延长导向轮2311的使用寿命。
[0066]
可选地,上述实施例中的第一传动轮222、主动轮221、第二传动轮223亦可进行阳极氧化处理,和/或,开设限位槽,在此不做限定。
[0067]
请继续参阅2至图5。在一实施例中,牵引装置还包括牵引台25,传动轮组件22以及导向组件23设于牵引台25的同一侧。其中,当牵引装置正确放置时,牵引台25朝向传动轮组件22以及导向组件23的一面可以平行于重力方向。如是,导向组件23相对传动轮组件22移动的预设方向x平行于重力方向。
[0068]
活动组件24包括连接件241以及活动件242。连接件241设于牵引台25,且连接件241与牵引台25相对固定。
[0069]
活动件242可移动地设于连接件241远离牵引台25的一侧,以当活动件242相对连接件241移动时,能够带动设于其的导向组件23相对牵引台25移动,相对传动轮组件22运动。
[0070]
进一步地,连接件241包括连接部2411以及弯折部2412。连接部2411设于牵引台25,与活动件242相对且间隔设置,连接部2411与活动件242通过弯折部2412连接。
[0071]
弯折部2412可以设有轴孔。活动组件24还包括活动驱动件243,活动驱动件243可移动地穿设于轴孔,且活动驱动件243与活动件242连接,以带动活动件242相对连接件241沿预设方向x移动。
[0072]
可选地,活动驱动件243可以测微丝杆、连接杆等。轴孔表面与活动驱动件243表面可以设有相对应的螺纹、磁性组件等,在此不做限定。
[0073]
在一替代实施例中,连接件241与活动件242还可以通过滑块与滑槽结构相对移动等,在此不做限定。
[0074]
请继续参阅图3。在一实施例中,导向组件23还可以包括连接轴232,连接轴232设于活动件242,导向件231可转动地设于连接轴232远离活动件242的一侧,导向件231通过连接轴232连接活动件242。
[0075]
请继续参阅图3。在一实施例中,活动组件24还包括锁扣件244,设于连接件241和/或活动件242。锁扣件244具有锁定状态以及开启状态,当锁扣件244处于锁定状态时,能够组件活动件242相对连接件241移动;当锁扣件244处于开启状态时,允许活动件242相对连接件241移动。以当活动驱动件243驱动导向组件23移动至目标位置后,可以利用锁扣件244将活动件242“锁死”,使得导向件231可靠停靠于目标位置。
[0076]
可选地,连接件241可以设有沉孔,以能够配合螺杆、螺母等固定于牵引台25。进一步地,沉孔周围可以进一步使用m3、m2内六角圆柱头螺钉进行加固,进一步保证活动组件24能够可靠设于牵引台25。
[0077]
综上,本实用新型剔除使用皮带的风险。光纤受单侧导轮的摩擦力,能够有效减少摩擦力来源。同时,减小光纤与导轮的接触面积,减小光纤在拉丝过程中产生的内部缺陷进一步传导。并且,本实用新型合理利用光纤牵引传输路径,采用第二传动轮与主动轮的结构,通过调节光纤在主动轮的缠绕角度,控制光纤的牵引力稳定。当移动台运动到合理的目标位置后,利用锁扣件将活动件锁死,有利于导向轮的可靠停靠,保证长期使用过程中牵引装置结构的稳定性。零件使用寿命长,一致性程度高。
[0078]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下在其他实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1