一种夹持机构及移载装置的制作方法
1.本实用新型属于物料移动技术领域,具体是涉及到一种夹持机构及移载装置。
背景技术:
2.电解精炼是指利用不同元素的阳极溶解或阴极析出难易程度的差异而提取纯金属的技术,常用于有色金属的精炼。在电解系统中,阳极板是必不可少的部件,通常悬挂在阳极杆上,在电解工艺中,针对需要移动阳极板的场景,如阳极板的套袋或拆袋,传统的做法是停机后通过人工手动提拉阳极杆,以移动阳极板,这种方式需要消耗大量人力和时间,还容易影响加工效率。
3.为了提高电解工艺的自动化程度,取消人工提拉阳极板作业,同时一次对多块阳极板进行移动,目前现有技术会采用多个挂钩配合移载机构的方式来进行,即移动挂钩使其钩在阳极杆的两端上,移载机构再带动阳极板进行移动,该种方式阳极板容易在移动过程中产生晃动,存在安全隐患,可靠性有待提升。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种夹持稳定可靠、安全性高、适用范围更广的夹持机构及移载装置。
5.本实用新型提供一种夹持机构,包括安装座和设置在安装座上的夹爪组件、动力模块一,所述夹爪组件设置有两个,单个所述夹爪组件包括平行设置两个安装杆,两个安装杆上各设置有两个以上的钩爪,两个以上钩爪沿安装杆的长度方向间隔设置,两个安装杆上的钩爪错位相对设置,所述动力模块一用于驱动两个安装杆沿自身长度方向移动,且两个安装杆移动方向相反。
6.更进一步地,所述钩爪包括夹持部和承托部,所述承托部横向设置在夹持部的一端。
7.更进一步地,所述安装杆滑动设置在安装座上。
8.更进一步地,所述安装座上设置有滑块一,所述安装杆背离钩爪的一面设置有与滑块一滑动配合的导轨一。
9.更进一步地,所述动力模块一设置有四个,四个所述动力模块一分别对应驱动四个安装杆移动。
10.更进一步地,所述动力模块一设置有两个,两个夹爪组件中移动方向相同的安装杆由同一个动力模块一驱动。
11.本实用新型还提供一种移载装置,包括上述的夹持机构,还包括用于驱动夹持机构沿z轴方向移动的z轴驱动机构。
12.更进一步地,还包括移动架,所述z轴驱动机构包括转动设置在移动架上的齿轮一、与齿轮一啮合的齿条一及用于驱动齿轮一转动的动力模块二,动力模块二固定设置在移动架上,齿条一与移动架滑动连接,所述安装座与齿条一的一端连接。
13.更进一步地,还包括用于驱动移动架沿y轴方向移动的y轴驱动机构。
14.更进一步地,还包括机架,所述移动架与机架滑动连接,所述y轴驱动机构包括齿轮二、与齿轮二啮合的齿条二及用于驱动齿轮二转动的动力模块三,动力模块三固定设置在移动架上,齿条二固定设置在机架上。
15.本实用新型的有益效果是,由于两个安装杆上的钩爪错位相对设置,在通过动力模块一驱动两个安装杆移动时,两个安装杆上的位置对应的钩爪相互靠近,阳极杆的端部被限位在两个安装杆的钩爪之间,从而使两个夹爪组件分别抱住阳极杆的两端,即对阳极杆的两端进行夹持,而钩爪的下端则起到承托的作用,本实用新型不仅可一次对两个以上的阳极杆进行夹持,相比于挂钩悬挂的方式,可避免移载过程中阳极板产生晃动,安全性及可靠性更高,而该种通过相对移动进行错位夹持的方式,使得本实用新型能够适用于一定范围内不同直径阳极杆的夹持作业,适用范围更广。
附图说明
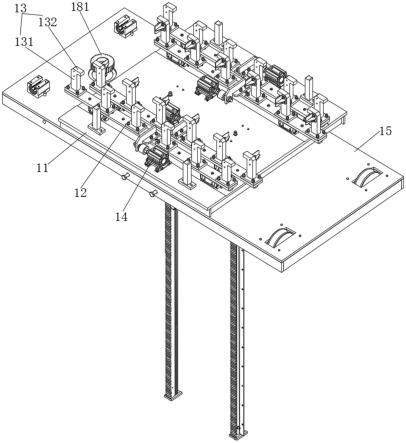
16.附图1为本实用新型第一视角的结构示意图。
17.附图2为本实用新型第二视角的结构示意图。
18.附图3为本实用新型第三视角的结构示意图。
19.在图中,11-安装座;12-安装杆;13-钩爪;131-夹持部;132-承托部;14-动力模块一;15-移动架;16-z轴驱动机构;161-齿轮一;162-齿条一;163-动力模块二;17-机架;18-y轴驱动机构;181-齿轮二;182-齿条二;183-动力模块三。
具体实施方式
20.如附图1-3所示,本实用新型提供一种夹持机构,包括安装座11、夹爪组件和动力模块一14,夹爪组件和动力模块一14均设置在安装座11上,所述夹爪组件设置有两个,用于对应夹持阳极杆的两端,单个所述夹爪组件包括两个安装杆12,两个安装杆12平行设置,两个安装杆12上各设置有两个以上的钩爪13,两个以上钩爪13沿其所在的安装杆12的长度方向间隔设置,两个安装杆12上的钩爪13位置对应,且两个安装杆12上的钩爪13的朝向相反,使得两个安装杆12上的钩爪13错位相对设置,所述动力模块一14固定设置在安装座11上,用于驱动两个安装杆12沿自身长度方向移动,且单个夹爪组件中的两个安装杆12移动方向相反,从而使得两个安装杆12上的钩爪13相互靠近或远离,以完成夹持或松开的操作。
21.本实用新型提供夹持机构,通过设置两个平行且移动方向相反的安装杆12,并在两个安装杆12上均设置两个以上钩爪13,由于两个安装杆12上的钩爪13错位相对设置,在通过动力模块一14驱动两个安装杆12移动时,两个安装杆12上的位置对应的钩爪13相互靠近,阳极杆的端部被限位在两个安装杆12的钩爪13之间,从而使两个夹爪组件分别抱住阳极杆的两端,即对阳极杆的两端进行夹持,而钩爪13的下端则起到承托的作用,本实用新型不仅可一次抱住两个以上的阳极杆,以对其进行夹持,相比于挂钩悬挂的方式,本实用新型可避免移载过程中阳极板产生晃动,安全性及可靠性更高,而该种通过相对移动进行错位夹持的方式,也使得本实用新型能够适用于一定范围内范围内不同直径阳极杆的夹持作业,可适用的范围更广。
22.其中,如图1所述,所述钩爪13包括夹持部131和承托部132,所述承托部132横向设
置在夹持部131的一端。夹持部131即为对阳极杆端部侧面进行夹持固定的区域,所述承托部132即为钩爪13底部承托阳极杆的区域。
23.所述安装杆12滑动设置在安装座11上,以对安装杆21的移动起到导向作用。具体为,所述安装座11上设置有滑块一,所述安装杆12背离钩爪13的一面设置有导轨一,所述导轨一与滑块一滑动连接。
24.在本实用新型的一个实施方式中,如图1所示,所述动力模块一14设置有四个,四个所述动力模块一14分别一对一驱动四个安装杆12移动。
25.在本实用新型的另一个实施方式方式中,所述动力模块一14设置有两个,两个夹爪组件中,移动方向相同的其中两个安装杆12由一个动力模块一14驱动,移动方向相同的另外两个安装杆12由另一个动力模块一14驱动。
26.在上述的实施方式中,优选动力模块一14为气缸或油缸,其输出端直接或通过传动杆与安装杆12连接。
27.本实用新型还提供一种移载装置,包括上述的夹持机构,还包括用于驱动夹持机构沿z轴方向移动的z轴驱动机构16,以进行阳极板的提升作业。
28.在该移载装置中还包括移动架15,所述z轴驱动机构16包括转动设置在移动架15上的齿轮一161、与齿轮一161啮合的齿条一162及用于驱动齿轮一161转动的动力模块二163,动力模块二163固定设置在移动架15上,动力模块二163的输出端与齿轮一161连接,齿条一162背离齿轮一161的一面设置有导轨二,导轨二沿齿条一162的长度方向设置,移动架15上固定设置有滑块二,滑块二与导轨二与滑动连接,以使齿条一162与移动架15滑动连接,所述安装座11与齿条一162的一端连接。优选动力模块二163为电机,动力模块二163驱动齿轮一161转动时,齿条一162带动夹持机构移动,以进行提升作业。
29.在该移载装置中还包括用于驱动移动架15沿y轴方向移动的y轴驱动机构18,以进行阳极板的横向移载作业。具体地,还包括机架17,所述移动架15上设置有滑块三,机架17顶部设置有导轨三,导轨三与滑块三滑动连接,以使移动架15与机架17滑动连接,所述y轴驱动机构18包括齿轮二181、与齿轮二181啮合的齿条二182及用于驱动齿轮二181转动的动力模块三183,动力模块三183优选为电机,动力模块三183固定设置在移动架15上,齿轮二181固定设置在动力模块三183的输出端上,齿条二182固定设置在机架17上。动力模块三183驱动齿轮二181转动时,在齿条二182的配合作用下,移动架15沿机架17上移动,以进行横向移载作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1