转向节通用托盘的制作方法
1.本实用新型涉及一种部件转运托盘,具体说是一种转向节通用托盘。
背景技术:
2.目前,大多在生产上线上采用多种产品混线生产及利用托盘进行转运,所以现有单一的产品托盘不能柔性兼容多种产品同时上线的需求,更换托盘又不能满足频繁更换多种产品形的状及定位时的节拍要求。因此,能够满足工厂自动化上下料的通用托盘,已成为目前急需要解决的问题。
技术实现要素:
3.鉴于上述技术的现状,本实用新型提供了一种转向节通用托盘,有效解决了人工上下料不容易分类,多种产品同时上产线托盘不能柔性兼容的问题。
4.本实用新型的技术解决方案是:转向节通用托盘,包括安装底板,在所述安装底板上呈半封闭状依次间隔排列设置1#仿形夹块、2#仿形夹块、3#仿形夹块、4#仿形夹块、5#仿形夹块、6#仿形夹块、7#仿形夹块、8#仿形夹块、9#仿形夹块、10#仿形夹块,位于1#仿形夹块至10#仿形夹块之间的安装底板上设置防滑的橡胶块;在1#仿形夹块与10#仿形夹块之间形成转向节的放置口或是取出口;所述各仿形夹块为非等高体,其上设有稳定多种转向节的定位沉槽。
5.本新型中,所述1#仿形夹块、2#仿形夹块、3#仿形夹块、4#仿形夹块、5#仿形夹块、6#仿形夹块、7#仿形夹块、8#仿形夹块、9#仿形夹块、10#仿形夹块为橡胶材料制成。
6.本新型中,所述各仿形块定位沉槽形状与多种转向节的形状相吻合。
7.本新型中,所述橡胶块表面是具有粗糙度的防滑表面。这样放置转向节后不易滑动,有益于机器人放置转向节的准确定位。
8.本实用新型的有益效果是: 将已有技术的系托盘改为通用托盘,这样能满足多种转向节的摆放,托盘上有一层防滑橡胶块,产品放置后不易滑动,有益于机器人定位,每款产品摆放时和其他产品的仿形块不发生干涉,允许多种转向节同时上线,以及提高托盘的通用性,适用于不同种类转向节的利用效率,可满足多种不同异形产品同时生产时机器人从托盘上进行上下料的夹取。
附图说明
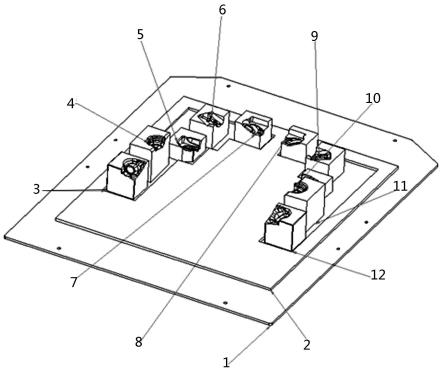
9.图1为本新型的结构示意图;
10.图2为实施例1转向节摆放在1#仿形夹块上视图;
11.图3为实施例2转向节摆放在2#仿形夹块上视图;
12.图4为实施例3转向节摆放在3#仿形块夹上视图;
13.图5为实施例4转向节摆放在4#仿形夹块上视图;
14.图6为实施例5转向节摆放在5#仿形夹块视图;
15.图7为实施例6转向节摆放在6#仿形夹块上视图;
16.图8为实施例7转向节摆放在7#仿形夹块上视图;
17.图9为实施例8转向节摆放在8#仿形夹块上视图;
18.图10为实施例9转向节摆放在9#仿形夹块上视图;
19.图11为实施例10转向节摆放在10#仿形夹块上视图。
20.图中:1为安装底板、2为橡胶块、3为1#仿形块、4为2#仿形块、5为3#仿形块、6为4#仿形块、7为5#仿形块、8为6#仿形块、9为7#仿形块、10为8#仿形块、11为9#仿形块、12为10#仿形夹块。
具体实施方式
21.下面将结合附图实施例对本实用新型作进一步说明。
22.见图1所示的转向节通用托盘,包括安装底板1,在所述安装底板1上呈半封闭状依次间隔排列固定设置1#仿形夹块3、2#仿形夹块4、3#仿形夹块5、4#仿形夹块6、5#仿形夹块7、6#仿形夹块8、7#仿形夹块9、8#仿形夹块10、9#仿形夹块11、10#仿形夹块12,使其1#仿形夹块3与10#仿形夹块12之间形成转向节的放置口或是取出口。本实施例在其安装底板1上设有橡胶块2,该橡胶块2位于1#仿形夹块至10#仿形夹块之间的安装底板上,所述橡胶块2表面是具有粗糙度的防滑表面。这样放置转向节后不易滑动,有益于机器人放置转向节的准确定位。本实施例中,所述各仿形夹块3至12为非等高体,其上设有稳定多种转向节的定位沉槽(图中未标注)。本新型中,所述1#仿形夹块3、2#仿形夹块4、3#仿形夹块5、4#仿形夹块6、5#仿形夹块7、6#仿形夹块8、7#仿形夹块9、8#仿形夹块10、9#仿形夹块11、10#仿形夹块12均为橡胶材料制成。
23.本新型中,所述各仿形夹块定位沉槽形状与多种转向节的定位部位形状相吻合。
24.见图2给出了实施例1的转向节13定位放置示意图。该实施例1的转向节13上的a、b部位分别放置在9#仿形夹块11和10#仿形夹块12上,使其转向节13上的其它部位接触在橡胶块2上形成支撑点,保证转向节13安放在托盘上的稳定性。
25.见图3给出了实施例2的转向节14定位放置示意图。该实施例2的转向节14上的a、b、c部位分别放置在8#仿形夹块10、9#仿形夹块11和10#仿形夹块12上,使其转向节14上的其它部位接触在橡胶块2上形成支撑点,保证转向节14安放在托盘上的稳定性。
26.见图4给出了实施例3的转向节15定位放置示意图。该实施例3的转向节15上的a部位放置在8#仿形夹块10上,b部位与9#仿形夹块1一侧接触,使其转向节15上的其它两点部位接触在橡胶块2上形成支撑点,保证转向节15安放在托盘上的稳定性。
27.见图5给出了实施例4的转向节16定位放置示意图。该实施例4的转向节16上的a部位放置在7#仿形夹块9上,该转向节16上的a部位侧向位置搭接在8#仿形夹块10上,其它两点部位接触在橡胶块2上形成支撑点,保证转向节16安放在托盘上的稳定性。
28.见图6给出了实施例5的转向节17定位放置示意图。该实施例5的转向节17上的a、b部位分别放置在6#仿形夹块8和8#仿形夹块10上,其它两点部位接触在橡胶块2上形成支撑点,保证转向节17安放在托盘上的稳定性。
29.见图7给出了实施例6的转向节18定位放置示意图。该实施例6的转向节18上的a部位放置在5#仿形夹块7上,转向节18上的其中一个部位与3#仿形夹块5的一侧接触,其它两
点部位接触在橡胶块2上形成支撑点,保证转向节18安放在托盘上的稳定性。
30.见图8给出了实施例7的转向节19定位放置示意图。该实施例7的转向节19上的a部位放置在4#仿形夹块6上,转向节19上的其中一个部位与2#仿形夹块4的一侧接触,其它两点部位接触在橡胶块2上形成支撑点,保证转向节19安放在托盘上的稳定性。
31.见图9给出了实施例8的转向节20定位放置示意图。该实施例8的转向节20上的a、b部位分别放置在3#仿形夹块5和2#仿形夹块4上,转向节20其它两点部位接触在橡胶块2上形成支撑点,保证转向节20安放在托盘上的稳定性。
32.见图10给出了实施例9的转向节21定位放置示意图。该实施例9的转向节21上的a、b部位分别放置在2#仿形夹块4和3#仿形夹块5上,转向节21的c部位放置在1#仿形夹块3上,转向节21的其它部位接触在橡胶块2上形成支撑点,保证转向节21安放在托盘上的稳定性。
33.见图11给出了实施例10的转向节22定位放置示意图。该实施例10的转向节22上的a部位放置在1#仿形夹块3上,转向节22的b部位与2#仿形夹块4一侧接触,转向节22的其它部位接触在橡胶块2上形成支撑点,保证转向节22安放在托盘上的稳定性。
34.本新型中的转向节是利用机器人抓取后,将不同的转向节放置到相应的仿形夹块上进行稳定的定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1