一种主动防护型转运机械臂的制作方法
本技术涉及夹取机械,尤其涉及一种主动防护型转运机械臂。
背景技术:
1、在现今的自动化加工制程当中,传送设备为非常重要的一环,其主要用以将原物料或半成品依照预先设定的路径及速率传送通过相关的加工设备,进而以提高生产品的加工产能,以及避免原物料、半成品或成品在传送过程中遭不当毁损。
2、而在当今的自动化机械运用中,在后包装生产流程中,为了让产品或半成品通过自动程序控制进行货物的码放是十分便利的,而现阶段所采用的自动化码垛机械只能进行单独的将货物码放在指定位置上,在码垛设备进行码垛前,需要前端设备进行封箱处理,而在封箱后则没有设备对封箱后的箱包进行质检,存在封箱不良的情况,并且会造成内部产品在运输、转运过程中发生箱体破裂,造成运输损耗率上升;而在码垛设备进行码垛的过程中,且夹头上并无任何防护措施,当设备夹头在工作过程中与外界物体接触碰撞,则还会造成码垛设备损毁,导致生产效率降低的同时,还由于设备损坏位置产生巨大的经济成本。
技术实现思路
1、本实用新型的目的是针对背景技术中存在的问题,提出一种能够具有防护能力且进行夹取质检的防护型夹取装置。
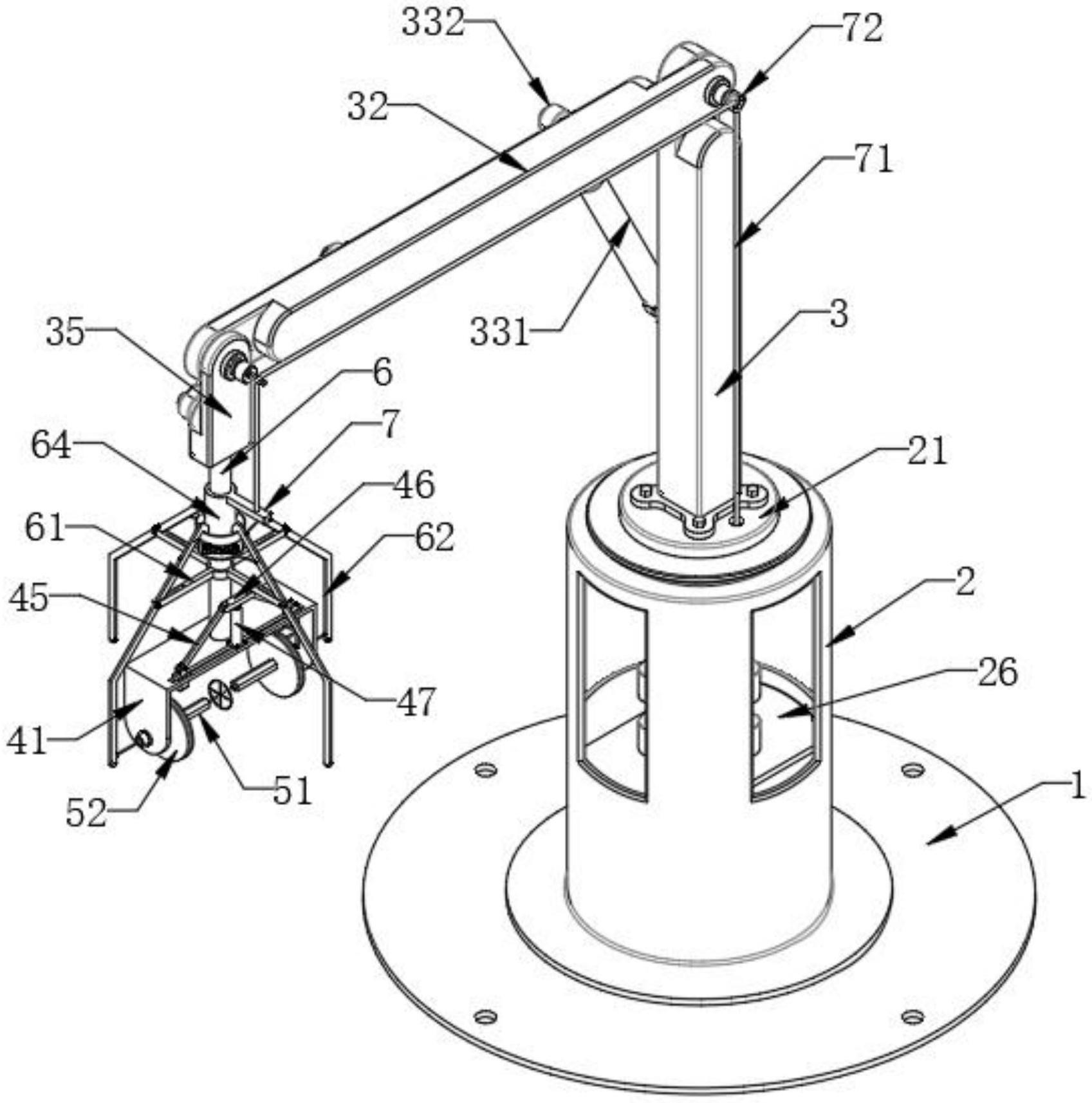
2、本实用新型的技术方案:一种主动防护型转运机械臂,包括安装底盘以及固定安装在安装底盘上的底座空筒,所述底座空筒的顶部转动连接有延伸至底座空筒内的连接柱,所述连接柱的下侧固定有棱杆一,所述棱杆一的下端设置有用于驱动棱杆一转动的驱动组件;所述连接柱的上侧固定有主臂,所述主臂通过轴一转动连接有臂一,所述主臂与臂一之间固定有第一驱动器,所述臂一上通过轴二转动连接有臂三,所述臂三与臂一之间固定有第二驱动器;所述臂三的下端通过圆臂杆固定有夹取机构,所述圆臂杆上设置有防护机构;
3、所述防护机构包括固定套设在圆臂杆上的固定套,所述固定套上圆周方向等间距固定有多个支撑臂,所述支撑臂的自由端转动连接有多折弯护杆,其中两个所述多折弯护杆之间固定有触发件,所述固定套的上侧设置有活动套设在圆臂杆上的护套,所述护套上固定套设有与多个多折弯护杆配合的内坡形环套件,所述圆臂杆上设置有与多个多折弯护杆配合联动的联结组件,所述护套上固定有外接条一,所述外接条一上固定有牵拉索,所述轴一与轴二的端部均转动连接有套设在牵拉索上的引导环,所述牵拉索的另一端固定有与轴承套外圈固定的外接条二。
4、优选的,所述夹取机构包括与圆臂杆固定的u形板架,所述u形板架内侧固定有固定导向杆,所述固定导向杆上活动套设有两个l形滑杆,所述l形滑杆上固定有滑动连接在u形板架上的滑块,两个所述滑块上均转动连接有同步连杆,两个所述同步连杆共同转动连接有同接板,所述同接板与u形板架顶部之间固定有伸缩件,每个所述l形滑杆的下端均固定有延长限定杆;所述u形板架的两侧均转动连接有圆管,两个所述圆管相互靠近的一端均固定有多棱导管,每个所述多棱导管上均活动套设有与延长限定杆相配合的夹持盘,所述u形板架上设置有用于驱动圆管转动的动力件。
5、优选的,所述动力件包括固定在u形板架上的电机二,所述电机二的输出轴上固定有齿轮二,所述齿轮二的下侧设置有固定套设在圆管上与齿轮二啮合传动的齿轮一。
6、优选的,所述u形板架的上侧开设有供两个滑块滑动的滑动槽,两个所述滑块滑动连接在滑动槽内。
7、优选的,所述夹持盘的外圆周面上加工有凹形环槽,两个延长限定杆的下端分别延伸至两个凹形环槽内。
8、优选的,所述第一驱动器包括两个分别与主臂、臂一同侧固定的安装轴一,两个所述安装轴一上均活动套设有连接套一,两个所述连接套一之间固定有电推杆一,所述第二驱动器包括两个分别与臂一、臂三同侧固定的安装轴二,两个所述安装轴二上均活动套设有连接套二,两个所述连接套二之间固定有电推杆二。
9、优选的,所述触发件包括固定在两个多折弯护杆之间的拉绳一,所述圆管以及多棱导管均套设在拉绳一上,所述拉绳一的中部固定套设有触发轮。
10、优选的,所述联结组件包括固定套设在圆臂杆上的定位套板,所述定位套板上固定有多个定轴件,每个所述定轴件上均活动套设有齿轮三,多个所述齿轮三共同啮合传动有活动套设在圆臂杆上的齿环,每个所述齿轮三上侧均固定有指向杆,所述指向杆上通过球接头一固定有中接杆,所述中接杆的自由端通过球接头二与对应的多折弯护杆连接。
11、优选的,所述驱动组件包括固定在底座空筒内的固定板,所述固定板的下侧固定有电机一,所述电机一的输出轴贯穿固定板且通过联轴器固定有棱杆二,所述棱杆二上套设有与棱杆二配合的内棱套管,所述内棱套管上固定套设有与棱杆一配合插接的轴承套。
12、优选的,所述底座空筒的内侧设置有报警组件,所述报警组件包括与内棱套管固定的延长定杆,所述延长定杆上滑动设置有滑件,所述滑件的上端固定有击打盘,所述固定板的上侧圆周等距固定有多个竖杆,多个所述竖杆上端均固定有与击打盘配合撞击的撞击发声器。
13、与现有技术相比,本实用新型具有如下有益的技术效果:
14、通过设置的主臂、臂一、臂三的多节转动臂,可配合电推杆一以及电推杆二完成驱动配合工作,实现自动调整摆动位置,并且通过驱动组件实现驱动偏转方向,设置的夹取机构能够进行夹取工作,通过外部控制终端自动控制电推杆一、电推杆二、电机一、伸缩件以及电机二,可实现自动化操作;
15、通过设置的防护机构可当在任意的多折弯护杆与外界箱包接触碰撞,通过多折弯护杆的偏转转动配合上连接组件使用,可自动将多折弯护杆与内坡形环套件脱离,其护套上通过外接条一、牵拉索、外接条二的牵拉作用在内棱套管的重力作用下自动牵拉,即可自动断开电机一通过内棱套管带动棱杆一转动的目的,实现自动停机,避免与外界箱包持续碰撞;并且增设的报警装置可由于电机一未停机持续工作,而发生击打盘击打撞击发声器的情况,实现响铃声音,提示报警,便于及时处理;
16、当在夹取箱包内箱包掉落时,由于设置的触发轮以及拉绳一作用牵拉多折弯护杆,即可实现与碰撞相同的停机动作,利于对产品进行包装质检。
技术特征:
1.一种主动防护型转运机械臂,其特征在于:包括安装底盘(1)以及固定安装在安装底盘(1)上的底座空筒(2),所述底座空筒(2)的顶部转动连接有延伸至底座空筒(2)内的连接柱(21),所述连接柱(21)的下侧固定有棱杆一(22),所述棱杆一(22)的下端设置有用于驱动棱杆一(22)转动的驱动组件;所述连接柱(21)的上侧固定有主臂(3),所述主臂(3)通过轴一(31)转动连接有臂一(32),所述主臂(3)与臂一(32)之间固定有第一驱动器,所述臂一(32)上通过轴二(34)转动连接有臂三(35),所述臂三(35)与臂一(32)之间固定有第二驱动器;所述臂三(35)的下端通过圆臂杆(4)固定有夹取机构,所述圆臂杆(4)上设置有防护机构;
2.根据权利要求1所述的一种主动防护型转运机械臂,其特征在于:所述夹取机构包括与圆臂杆(4)固定的u形板架(41),所述u形板架(41)内侧固定有固定导向杆(42),所述固定导向杆(42)上活动套设有两个l形滑杆(43),所述l形滑杆(43)上固定有滑动连接在u形板架(41)上的滑块(44),两个所述滑块(44)上均转动连接有同步连杆(45),两个所述同步连杆(45)共同转动连接有同接板(46),所述同接板(46)与u形板架(41)顶部之间固定有伸缩件(47),每个所述l形滑杆(43)的下端均固定有延长限定杆(48);所述u形板架(41)的两侧均转动连接有圆管(5),两个所述圆管(5)相互靠近的一端均固定有多棱导管(51),每个所述多棱导管(51)上均活动套设有与延长限定杆(48)相配合的夹持盘(52),所述u形板架(41)上设置有用于驱动圆管(5)转动的动力件。
3.根据权利要求2所述的一种主动防护型转运机械臂,其特征在于:所述动力件包括固定在u形板架(41)上的电机二(54),所述电机二(54)的输出轴上固定有齿轮二(55),所述齿轮二(55)的下侧设置有固定套设在圆管(5)上与齿轮二(55)啮合传动的齿轮一(53)。
4.根据权利要求2所述的一种主动防护型转运机械臂,其特征在于:所述u形板架(41)的上侧开设有供两个滑块(44)滑动的滑动槽,两个所述滑块(44)滑动连接在滑动槽内。
5.根据权利要求2所述的一种主动防护型转运机械臂,其特征在于:所述夹持盘(52)的外圆周面上加工有凹形环槽,两个延长限定杆(48)的下端分别延伸至两个凹形环槽内。
6.根据权利要求2所述的一种主动防护型转运机械臂,其特征在于:所述第一驱动器包括两个分别与主臂(3)、臂一(32)同侧固定的安装轴一(33),两个所述安装轴一(33)上均活动套设有连接套一(332),两个所述连接套一(332)之间固定有电推杆一(331),所述第二驱动器包括两个分别与臂一(32)、臂三(35)同侧固定的安装轴二(36),两个所述安装轴二(36)上均活动套设有连接套二(362),两个所述连接套二(362)之间固定有电推杆二(361)。
7.根据权利要求6所述的一种主动防护型转运机械臂,其特征在于:所述触发件包括固定在两个多折弯护杆(62)之间的拉绳一(63),所述圆管(5)以及多棱导管(51)均套设在拉绳一(63)上,所述拉绳一(63)的中部固定套设有触发轮(631)。
8.根据权利要求7所述的一种主动防护型转运机械臂,其特征在于:所述联结组件包括固定套设在圆臂杆(4)上的定位套板(65),所述定位套板(65)上固定有多个定轴件(651),每个所述定轴件(651)上均活动套设有齿轮三(652),多个所述齿轮三(652)共同啮合传动有活动套设在圆臂杆(4)上的齿环(653),每个所述齿轮三(652)上侧均固定有指向杆(654),所述指向杆(654)上通过球接头一(655)固定有中接杆(656),所述中接杆(656)的自由端通过球接头二(657)与对应的多折弯护杆(62)连接。
9.根据权利要求1所述的一种主动防护型转运机械臂,其特征在于:所述驱动组件包括固定在底座空筒(2)内的固定板(26),所述固定板(26)的下侧固定有电机一(27),所述电机一(27)的输出轴贯穿固定板(26)且通过联轴器固定有棱杆二(28),所述棱杆二(28)上套设有与棱杆二(28)配合的内棱套管(23),所述内棱套管(23)上固定套设有与棱杆一(22)配合插接的轴承套(24)。
10.根据权利要求9所述的一种主动防护型转运机械臂,其特征在于:所述底座空筒(2)的内侧设置有报警组件,所述报警组件包括与内棱套管(23)固定的延长定杆(8),所述延长定杆(8)上滑动设置有滑件(81),所述滑件(81)的上端固定有击打盘(82),所述固定板(26)的上侧圆周等距固定有多个竖杆(83),多个所述竖杆(83)上端均固定有与击打盘(82)配合撞击的撞击发声器(84)。
技术总结
本技术涉及夹取机械技术领域,尤其涉及一种主动防护型转运机械臂。其技术方案包括:安装底盘以及固定安装在安装底盘上的底座空筒,底座空筒的顶部转动连接有延伸至底座空筒内的连接柱,连接柱的下侧固定有棱杆一,棱杆一的下端设置有用于驱动棱杆一转动的驱动组件;连接柱的上侧固定有主臂,主臂通过轴一转动连接有臂一,主臂与臂一之间固定有第一驱动器,臂一上通过轴二转动连接有臂三,臂三与臂一之间固定有第二驱动器;臂三的下端通过圆臂杆固定有夹取机构。本技术能够在夹取箱包的过程中,实现对箱包包装稳定性检测,实现自动报警;同时具备良好的防护性能,可在撞击时及实现缓冲以及提醒,降低损坏可能性。
技术研发人员:吴尹以沫,李为相,王晓荣,于文月
受保护的技术使用者:吴尹以沫
技术研发日:20221010
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!