一种晶棒/粘胶板/晶托粘接静置出库翻转升降装置的制作方法
1.本实用新型属于光伏技术领域,本实用新型涉及一种晶棒/粘胶板/晶托粘接静置出库翻转升降装置。
背景技术:
2.在面向光伏行业的自动化领域,存在着晶棒、粘胶板、晶托粘接静置出库翻转的自动化需求,对于光伏自动化晶棒粘胶线单工位晶棒、晶托、粘胶板上下的三合一压合工位,粘胶板与晶托粘接后,随即进行晶棒和粘胶板之间粘合,完成之后由机械手搬送粘接完成的晶棒、粘胶板、晶托至静置库里静置。待胶水固化后再由下料机械手搬起出库。
3.目前存在的晶棒、粘胶板、晶托粘接静置出库翻转装置结构复杂,不稳定,能耗高等缺点。
技术实现要素:
4.本实用新型的目的是克服上述背景技术中的不足,使得这种出库翻转升降装置能在光伏自动化中晶棒、粘胶板、晶托翻转出库过程中真正满足工业生产所需的高效稳定,提供一种晶棒/粘胶板/晶托粘接静置出库翻转升降装置,在将晶棒、粘胶板、晶托粘胶静置完成后从静置库到出库车的转运过程中,通过本实用新型的翻转机构、锁紧组件、升降机构,实现对晶棒、粘胶板、晶托翻转的操作,且拥有高稳定性与长使用寿命。
5.本实用新型解决其技术问题所采用的技术方案是:一种晶棒/粘胶板/晶托粘接静置出库翻转升降装置,包括翻转机构、升降机构;翻转机构设置在升降机构内部中间位置;所述翻转机构包括翻转锁紧组件框架;翻转锁紧组件框架上设有锁紧组件;升降机构包括主体框架,主体框架上设置升降横梁,升降横梁通过传动机构在主体框架内上下移动;升降横梁上设有翻转电机,翻转电机通过减速器和翻转旋转轴a与翻转锁紧组件框架连接。
6.锁紧组件包括气缸,气缸固定设置在翻转锁紧组件框架一面;气缸推杆与凸轮槽板连接座连接,凸轮槽板连接座通过导轨和滑块与翻转锁紧组件框架面活动连接;凸轮槽板连接座两端分别连接凸轮槽板左、凸轮槽板右,凸轮槽板连接座跟随气缸一起左右运动;凸轮槽板左、凸轮槽板右上分别开设有用于凸轮随动器滑动移动的凹槽,凸轮槽板左、凸轮槽板右的凹槽内分别设有凸轮随动器;其中一个凸轮随动器与凸轮转臂左连接,另一个凸轮随动器与凸轮转臂右连接;凸轮转臂左、凸轮转臂右的另一端分别与配设的凸轮连接,凸轮分别设置在凸轮槽板左、凸轮槽板右的侧面;锁紧组件还包括两个t形锁紧轴;凸轮转臂左、凸轮转臂右的安装孔分别安装在t形锁紧轴的轴上,从而实现t形锁紧轴转动;t形锁紧轴底部通过旋转轴承座上下锁紧后安装在翻转锁紧组件框架上。
7.升降机构还包括升降电机,升降电机设在主体框架的上部,主体框架内侧两面在竖直方向分别设有两条直线导轨,升降横梁设有两个,两个升降横梁分别通过直线导轨与主体框架内侧两面连接实现上下移动;每个升降横梁上均设有与翻转机构连接的翻转轴承座;传动机构设置在主体框架的两侧用于带动两个升降横梁上下移动,升降电机通过减速
器和传动轴连接,传动轴通过轴承座固定在主体框架上;传动轴上设有两个主动链轮,每个主动链轮处设有一个从动链轮导向,每个主动链轮、从动链轮通过链条分别与同侧的升降横梁连接实现升降横梁的上下移动。
8.翻转锁紧组件框架上还设有用于检测凸轮槽板左、凸轮槽板右位置的凸轮槽板位置检测传感器。
9.翻转锁紧组件框架的两侧分别设置翻转旋转轴a、翻转旋转轴b;翻转旋转轴a、翻转旋转轴b保证同心设置。翻转旋转轴a、翻转旋转轴b分别设置在翻转轴承座上。
10.翻转锁紧组件框架上下两端分别设有挡板;用于固定限位工件晶托的长边。
11.进一步的,翻转锁紧组件框架上对应一组锁紧组件还设有晶托导向条、晶托托板;晶托导向条、晶托托板分别设置在翻转锁紧组件框架上;工件通过晶托导向条和导向定位置于晶托托板上。
12.工件为晶棒、粘胶板、晶托组合工件。
13.进一步的,晶托托板设有两条;气缸与晶托托板、晶托导向条分别设置在翻转锁紧组件框架的正反两面上。
14.进一步的,锁紧组件不限制个数,按需配置即可,优选设置两组;
15.进一步的,凸轮设置在翻转锁紧组件框架面上。
16.装置还配设有plc控制系统,所述翻转电机、升降电机、气缸、凸轮槽板位置检测传感器分别与plc控制系统连接。
17.翻转机构其两端的挡板固定板挡住晶托的两个长边,防止其前后窜动。在翻转机构上设有的锁紧组件,动力由气缸提供,气缸推动凸轮槽板连接座进而带动凸轮槽板左右移动,带动凸轮臂和凸轮随动器在凸轮槽板内的凹槽移动,从而带动t形锁紧轴旋转90度,此时t形锁紧轴头部卡在晶托下方燕尾槽内,实现了晶棒、粘胶板、晶托左右定位,且保证了晶棒、粘胶板、晶托在翻转过程中不会脱落。翻转机构两端安装翻转旋转轴,翻转旋转轴通过翻转轴承座固定在升降机构的主体框架上,最后与翻转电机加和减速器连接。晶棒、粘胶板、晶托固定好之后,通过翻转电机驱动翻转机构整体翻转180度。
18.升降机构通过链轮和链条传动,通过升降电机和减速器驱动主动链轮,通过从动链轮导向和链条,链条的另一端连接升降横梁,带动翻转机构共同上下运动,从而实现将晶棒、粘胶板、晶托放到下料车上或其他工序上。
19.本实用新型与现有技术相比具有的有益效果是:
20.本实用新型提供的晶棒/粘胶板/晶托粘接静置出库翻转升降装置使用气缸和凸轮实现晶棒、粘胶板、晶托翻转过程的锁止;使用电机加减速机和翻转机构实现翻转动作。采用链轮链条传动结构,电机驱动方式来实现晶棒、粘胶板、晶托上下运动。极大的改善了现有机构的稳定性,提高了使用寿命,使得这种装置可以达到工业化规模应用水平。
21.本实用新型提供的晶棒/粘胶板/晶托粘接静置出库翻转升降装置相比与现有技术具有以下优点:
22.1.由于可以替代人工和半自动设备,本发明可以有效节约生产成本;
23.2.由于本实用新型提供的装置可以快速精准完成翻转下料功能,能有效提升产能;
24.3.本实用新型提供的装置能够避免接触晶棒,可以消除晶棒污染,极大提升硅片
的良率。
25.4.本实用新型提供的装置结构简单,便于维护保养;
26.5.本实用新型提供的装置无金属屑污染,稳定性高,使用寿命高,适合工业批量使用。
附图说明
27.下面结合附图和实施例对本实用新型进一步说明:
28.图1是本实用新型翻转机构立体图。
29.图2是本实用新型翻转机构仰视图。
30.图3是本实用新型翻转机构俯视图。
31.图4是本实用新型翻转机构侧视图。
32.图5是图2的a-a剖视图。
33.图6是图2的b-b剖视图。
34.图7是图6的放大示意图。
35.图8是本实用新型翻转机构的示意图。
36.图9是本实用新型升降机构立体图。
37.图10是本实用新型升降机构俯视图。
38.图11是图10的a-a剖视图。
39.图12是本实用新型升降机构侧视图。
40.图13是本实用新型晶棒/粘胶板/晶托粘接静置出库翻转升降装置俯视图。
41.图14是本实用新型晶棒/粘胶板/晶托粘接静置出库翻转升降装置侧视图。
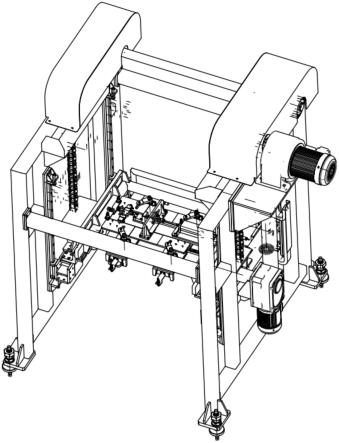
42.图15是本实用新型晶棒/粘胶板/晶托粘接静置出库翻转升降装置立体图。
43.图中1.翻转机构,2.升降机构,101.晶托导向条,102.晶托托板,103.工件,104.翻转锁紧组件框架,105.翻转旋转轴a,106.气缸,107.凸轮槽板位置检测传感器,108.凸轮转臂左,109.凸轮槽板左,110.凸轮槽板连接座,111.凸轮槽板右,112.凸轮转臂右,113.凸轮随动器,114.旋转轴承座,115.t形锁紧轴,116.左挡板,117.右挡板,118.翻转旋转轴b,201.升降电机,202.下料小车(非本机构内零件,仅供示意),203.从动链轮,204.传动轴,205.主动链轮,206.轴承座,207.链条,208.翻转轴承座,209.升降横梁,210.直线导轨,211.翻转电机,212.左主体框架,213.右主体框架。
具体实施方式
44.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。实施例中与plc控制系统连接的翻转电机、升降电机、气缸、凸轮槽板位置检测传感器均不限制某一具体型号,实现其工作功能即可。
45.实施例1
46.一种晶棒/粘胶板/晶托粘接静置出库翻转升降装置,如图1-图15所示,包括翻转机构1、升降机构2;翻转机构1设置在升降机构2内部中间位置;所述翻转机构1包括翻转锁紧组件框架104;翻转锁紧组件框架104上设有锁紧组件;升降机构2包括主体框架,主体框架上设置升降横梁209,升降横梁209通过传动机构在主体框架内上下移动;升降横梁209上
设有翻转电机211,翻转电机211通过减速器和翻转旋转轴a 105与翻转锁紧组件框架104连接。
47.锁紧组件包括气缸106,气缸106固定设置在翻转锁紧组件框架104一面;气缸106推杆与凸轮槽板连接座110连接,凸轮槽板连接座110通过导轨和滑块与翻转锁紧组件框架104面活动连接;凸轮槽板连接座110两端分别连接凸轮槽板左109、凸轮槽板右111,凸轮槽板连接座110跟随气缸106一起左右运动;凸轮槽板左109、凸轮槽板右111上分别开设有用于凸轮随动器113滑动移动的凹槽,凸轮槽板左109、凸轮槽板右111的凹槽内分别设有凸轮随动器113;其中一个凸轮随动器113与凸轮转臂左108连接,另一个凸轮随动器113与凸轮转臂右112连接;凸轮转臂左108、凸轮转臂右112的另一端分别与配设的凸轮连接,凸轮分别设置在凸轮槽板左109、凸轮槽板右111的侧面;锁紧组件还包括两个t形锁紧轴115;凸轮转臂左108、凸轮转臂右112的安装孔分别安装在t形锁紧轴115的轴上,从而实现t形锁紧轴115转动;t形锁紧轴115底部通过旋转轴承座114上下锁紧后安装在翻转锁紧组件框架104上。
48.升降机构2还包括升降电机201,升降电机201设在主体框架的上部,主体框架内侧两面在竖直方向分别设有两条直线导轨210,升降横梁209设有两个,两个升降横梁209分别通过直线导轨210与主体框架内侧两面连接实现上下移动;每个升降横梁209上均设有与翻转机构1连接的翻转轴承座208;传动机构设置在主体框架的两侧用于带动两个升降横梁209上下移动,升降电机201通过减速器和传动轴204连接,传动轴204通过轴承座206固定在主体框架上;传动轴204上设有两个主动链轮205,每个主动链轮205处设有一个从动链轮203导向,每个主动链轮205、从动链轮203通过链条207分别与同侧的升降横梁209连接实现升降横梁209的上下移动。
49.翻转锁紧组件框架104上还设有用于检测凸轮槽板左109、凸轮槽板右111位置的凸轮槽板位置检测传感器107。
50.翻转锁紧组件框架104的两侧分别设置翻转旋转轴a 105、翻转旋转轴b 118;翻转旋转轴a 105、翻转旋转轴b 118保证同心设置。翻转旋转轴a 105、翻转旋转轴b 118分别设置在翻转轴承座208上。
51.翻转锁紧组件框架104上下两端分别设有挡板;用于固定限位工件103晶托的长边。
52.翻转锁紧组件框架104上对应一组锁紧组件还设有晶托导向条101、晶托托板102;晶托导向条101、晶托托板102分别设置在翻转锁紧组件框架104上;工件103通过晶托导向条101和导向定位置于晶托托板102上。
53.工件103为晶棒、粘胶板、晶托组合工件。
54.晶托托板102设有两条;气缸106与晶托托板102、晶托导向条101分别设置在翻转锁紧组件框架104的正反两面上。
55.装置还配设有plc控制系统,所述翻转电机211、升降电机201、气缸106、凸轮槽板位置检测传感器107分别与plc控制系统连接。
56.锁紧组件设置两组。
57.凸轮设置在翻转锁紧组件框架104面上。
58.其具体实施工序为工件103由出库机械手从静置库抓取出来依次放到晶托托板
102上,锁组件设置两个为例,然后气缸106推出,通过凸轮槽板连接座110带动凸轮槽板左109和凸轮槽板右111同时运动,此时凸轮随动器113带动凸轮转臂左108和凸轮转臂右112转动90度,从而带动t形锁紧轴115旋转90度,正好卡在晶托的燕尾槽内将晶托锁紧。其两端的挡板挡住晶托的两个长边,防止其前后窜动。且保证了晶棒、粘胶板、晶托在翻转过程中不会脱落。升降横梁209通过直线导轨210和滑块与主体框架连接并能实现在直线导轨210上下滑动。链条207一端与升降横梁209连接,另一端在经过从动链轮203导向与主动链轮205连接。两侧的主动链轮205通过传动轴204连接最后和升降电机201连接。由翻转电机201驱动进行翻转动作;翻转机构1翻转180度后,由升降电机201带动升降横梁和翻转机构整体升降。
59.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1