一种自动导片上料机构的制作方法
1.本实用新型涉及晶圆上下料领域,尤其涉及一种自动导片上料机构。
背景技术:
2.目前,在湿法清洗工序中,需要先由工人利用晶圆导片机构,将一个晶圆拖篮内的晶圆片取出放置到另一专用的晶圆托篮内,然后将新的拖篮放置到晶圆清洗机构中;清洗之后,由人工取出,放入导片机构中,换回原来的拖篮里,进行下一道工序。
3.这会导致以下几个问题,首先需要人工搬,会因为工人操作的失误导致晶圆的破损、污染,造成重大损失;其次,人工进行所有的流程大概需要一个小时,就需要至少一个工人全程跟踪,费时费力。
技术实现要素:
4.本实用新型的一种自动导片上料机构,用于解决背景技术中晶圆在湿法清洗工序中自动化上下料的技术问题。
5.本实用新型提供的技术方案如下:一种自动导片上料机构,适用于晶圆甩干机的上料,包括:机架,横向排列在机架上、且可纵向位移的多个第一晶圆托篮,在机架上、并与第一晶圆托篮并排的第二晶圆托篮,在第一晶圆托篮和第二晶圆托篮上的抱片机构,在抱片机构正下方、且可上下位移的举片机构,移动连接于机架上、用于监测第二晶圆托篮内晶圆的监测机构,以及在机架上位移、用于将第二晶圆托篮送入晶圆甩干机内的气爪机构;
6.机架上连接有、用于气爪机构上下位移的第四丝杆机构,第四丝杆机构上连接有、用于气爪机构倾斜上料的抬升机构,连接于抬升机构和气爪机构之间、用于纵向位移的第五丝杆机构。
7.进一步的,抱片机构通过第一丝杆机构实现横向位移;抱片机构包括:与第一丝杆机构连接的第一抱片支架,连接于第一抱片支架顶部的第二抱片支架,以及连接于第二抱片支架顶部的抱片机构本体。
8.进一步的,举片机构通过第二丝杆机构连接于第一抱片支架上;举片机构包括:与第二丝杆机构连接的第一举片支架,竖直连接于第一举片支架上的第二举片支架,以及连接于第二举片支架顶部的举片机构本体。
9.进一步的,第一晶圆托篮通过第三丝杆机构连接于机架上,第一晶圆托篮包括:连接于第三丝杆机构上的第一托篮支架,以及插接在第一托篮支架上的第一托篮本体。
10.进一步的,第二晶圆托篮包括:连接于机架上的第二托篮支架,以及插接在第二托篮支架上的第二托篮本体。
11.进一步的,监测机构通过十字滑动机构连接于机架上,监测机构包括:光电传感器,以及竖直连接于十字滑动机构上、用于连接光电传感器的监测支架。
12.进一步的,抬升机构包括:连接于第五丝杆机构底部前后两侧位置的两组轴接机构,以及与一侧轴接机构连接的、用于上下位移的第六丝杆机构。
13.与现有技术相比,本实用新型的有益效果是:
14.(1)本实用新型的自动导片上料机构,通过机械化实现晶圆的上下料,传输稳定,避免了人工搬运,降低人员成本的同时,降低了因人工操作导致晶圆的破损、污染的风险。
15.(2)本实用新型的自动导片上料机构,通过设置抱片机构和举片机构的配合,使晶圆在传输换位时更为便捷,且避免了人员的触碰,避免了污染的风险。
16.(3)本实用新型的自动导片上料机构,通过设置第四丝杆机构、抬升机构和第五丝杆机构的配合,使气爪机构在上下料时,与清洗甩干设备的进料口更为契合,从而保证上下料的稳定,避免晶圆摆放不规范导致破损的风险。
附图说明
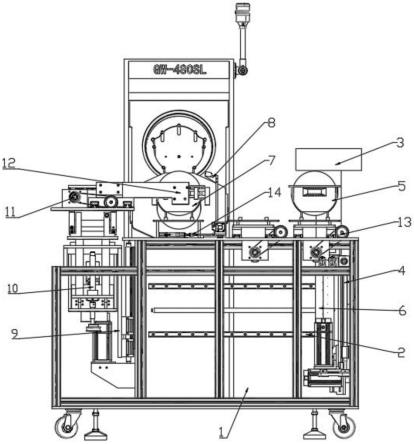
17.图1是本实用新型自动导片上料机构的整体结构示意图;
18.图2是本实用新型自动导片上料机构的后视图;
19.图3是本实用新型自动导片上料机构的右视图;
20.图4是本实用新型自动导片上料机构的俯视图;
21.图5是本实用新型图4中a-a的剖视图;
22.图6是本实用新型自动导片上料机构的主视图;
23.图7是本实用新型自动导片上料机构的左视图;
24.图8是本实用新型中第一托篮本体的结构示意图。
25.附图标记如下:1、机架,2、第一丝杆机构,21、第一滑轨,22、第一滑块,23、第一丝杆,24、第一丝杆螺母,25、第一电机,3、抱片机构,31、第一抱片支架,32、第二抱片支架,33、抱片机构本体,4、第二丝杆机构,41、第二滑轨,42、第二滑块,43、第二丝杆,44、第二丝杆螺母,45、第二电机,5、第一晶圆托篮,51、第一托篮支架,52、第一托篮本体,6、举片机构,61、第一举片支架, 62、第二举片支架,63、举片机构本体,7、第二晶圆托篮,71、第二托篮支架,72、第二托篮本体,8、监测机构,81、光电传感器, 82、监测支架,9、第四丝杆机构,91、第四滑轨,92、第四滑块, 93、第四丝杆,94、第四电机,10、抬升机构,101、框架,102、第六丝杆,1021、第六电机,103、第六丝杆螺母,104、限位板,105、支撑柱, 106、第一轴接座,107、第一连接件,108、连接板,109、第二轴接座,110、第二连接件,11、第五丝杆机构,111、倾斜平台,112、第五滑轨,113、第五滑块,114、第五丝杆,115、第五丝杆螺母, 116、第五电机,117、第二气爪支架,12、气爪机构,121、平行开闭型气爪,122、第一气爪支架,13、第三丝杆机构,131、第三滑轨, 132、第三滑块,133、第三丝杆,134、第三丝杆螺母,135、第三电机,14、十字滑动机构,141、第六滑轨,142、移动板,143、气缸, 144、第七滑轨,145、第七丝杆,146、第七丝杆螺母,147、第七电机。
具体实施方式
26.以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
27.如图1-8所示,本实用新型是一种自动导片上料机构,适用于晶圆甩干机的上料,包括:机架1,横向排列在机架1上、且可纵向位移的多个第一晶圆托篮5,在机架1上、并与第一晶圆托篮5并排的第二晶圆托篮7,在第一晶圆托篮5和第二晶圆托篮7上的抱片机构 3,
在抱片机构3正下方、且可上下位移的举片机构6,移动连接于机架1上、用于监测第二晶圆托篮7内晶圆的监测机构8,以及在机架1上位移、用于将第二晶圆托篮7送入晶圆甩干机内的气爪机构 12;
28.机架1上连接有、用于气爪机构12上下位移的第四丝杆机构9,第四丝杆机构9上连接有、用于气爪机构12倾斜上料的抬升机构10,连接于抬升机构10和气爪机构12之间、用于纵向位移的第五丝杆机构11。
29.本实施例的机架1外部包覆有钣金,用于设备防护。
30.如图2所示,抱片机构3通过第一丝杆机构2实现横向位移;抱片机构3包括:与第一丝杆机构2连接的第一抱片支架31,连接于第一抱片支架31顶部的第二抱片支架32,以及连接于第二抱片支架 32顶部的抱片机构本体33。
31.本实施例的抱片机构本体33有松开和夹紧两种状态,用于夹取晶圆。
32.本实施例的抱片机构本体33内设有多个用于夹持晶圆的弧形凹槽。
33.如图5所示,第一晶圆托篮5通过第三丝杆机构13连接于机架 1上,第一晶圆托篮5包括:连接于第三丝杆机构13上的第一托篮支架51,以及插接在第一托篮支架51上的第一托篮本体52。
34.本实施例的第一托篮支架51向后侧倾斜,防止第一托篮本体52 上的晶圆错位、偏摆。
35.本实施例的第一托篮本体52用于放置晶圆,且底部方便举片机构6穿行。
36.本实施例的第一托篮本体52内设有多个用于夹持晶圆的弧形凹槽。
37.本实施例的第二晶圆托篮7与第一晶圆托篮5可以是相同规格、也可以是不同规格的,根据实际生产设备情况来选择。
38.本实施例的第二晶圆托篮7包括:连接于机架1上的第二托篮支架71,以及插接在第二托篮支架71上的第二托篮本体72。
39.本实施例的第二托篮支架71向后侧倾斜,防止第二托篮本体72 上的晶圆错位、偏摆。
40.本实施例的第二托篮本体72内设有多个用于夹持晶圆的弧形凹槽。
41.本实施例的第二托篮本体72用于放置晶圆,且底部方便举片机构6穿行。
42.本实施例的气爪机构12包括:平行开闭型气爪121,以及连接于第五丝杆机构11和平行开闭型气爪121之间的第一气爪支架122。
43.本实施例的气爪机构12在第二晶圆托篮7的前侧。
44.进一步的,本实施例的第一丝杆机构2包括:横向连接在机架1 上的两个第一滑轨21,横向连接在机架1上、于第一滑轨21之间的第一丝杆23,第一丝杆23与第一电机25传动,第一电机25连接于机架1上;第一滑轨21上分别连接有第一滑块22,第一丝杆23上连接有第一丝杆螺母24,第一滑块22和第一丝杆螺母24上连接有第一抱片支架31。
45.本实施例的第一抱片支架31呈l型结构,第一抱片支架31的后侧与第一滑块22和第一丝杆螺母24连接。
46.具体的,当第一电机25启动后,第一电机25带动第一丝杆23 旋转,从而通过第一丝杆螺母24带动第一抱片支架31在第一丝杆 23上沿第一滑轨21位移。
47.进一步的,举片机构6通过第二丝杆机构4连接于第一抱片支架 31上;举片机构6
包括:与第二丝杆机构4连接的第一举片支架61,竖直连接于第一举片支架61上的第二举片支架62,以及连接于第二举片支架62顶部的举片机构本体63。
48.本实施例的第二丝杆机构4包括:竖直连接在第一抱片支架31 上的两个第二滑轨41和第二丝杆43,第二滑轨41上均连接有第二滑块42,第二丝杆43上连接有第二丝杆螺母44,第二丝杆43与第二电机45传动连接,第二电机45连接于第一抱片支架31上。
49.本实施例的第一举片支架61与第二滑块42和第二丝杆螺母44 连接。
50.本实施例的举片机构本体63可以从第一晶圆托篮5和第二晶圆托篮7内穿行。
51.本实施例的举片机构本体63内设有多个用于夹持晶圆的弧形凹槽。
52.具体的,当第二电机45启动时,第二电机45带动第二丝杆43 旋转,从而通过第二丝杆螺母44带动第一举片支架61在第二丝杆 43上沿第二滑轨41上下位移。
53.本实施例的第二滑轨41和第二丝杆44连接于第一抱片支架31 的右侧壁上。
54.具体的,当第一晶圆托篮5上的晶圆放置好后,启动第二电机 45,带动举片机构本体63上移,穿过第一晶圆托篮5将晶圆托起,直至抱片机构本体33内,抱片机构本体33收紧将晶圆托起,举片机构本体63从抱片机构本体33内下移、复位;启动第一电机25带动抱片机构本体33向左侧位移至第二晶圆托篮7上,再次启动第二电机45,带动举片机构本体63上移,穿过第二晶圆托篮7、将抱片机构本体33上的晶圆托起,抱片机构本体33松开,由举片机构本体 63下移,将晶圆放置于第二晶圆托篮7上,举片机构本体63继续下移、复位。
55.进一步的,本实施例的第三丝杆机构13包括:纵向连接在机架 1上的两个第三滑轨131,纵向连接在机架1上的第三丝杆133,第三滑轨131上连接有第三滑块132,第三丝杆133上连接有第三丝杆螺母134,第三滑块132和第三丝杆螺母134上连接有第一托篮支架 51;第三丝杆133与第三电机135传动连接,第三电机135连接于机架1上。
56.具体的,当第三电机135启动时,带动第三丝杆133旋转,从而通过第三丝杆螺母134带动第一托篮支架51在第三丝杆133上沿第三滑轨131纵向位移。
57.如图4所示,监测机构8通过十字滑动机构14连接于机架1上,监测机构8包括:光电传感器81,以及竖直连接于十字滑动机构14 上、用于连接光电传感器81的监测支架82。
58.本实施例的十字滑动机构14包括:在机架1上横向连接的两个第六滑轨141,第六滑轨141上连接有第六滑块,第六滑块上连接有移动板142,机架1上连接有气缸143,气缸143的输出轴与移动板 142连接;移动板142上纵向连接有两个第七滑轨144,在移动板142 上、于两个第七滑轨144之间连接有第七丝杆145,第七滑轨144上连接有第七滑块,第七丝杆145上连接有第七丝杆螺母146,第七滑块和第七丝杆螺母146上与监测支架82连接;第七丝杆145与第七电机147传动连接。
59.本实施例的光电传感器81用于对第二晶圆托篮7上的晶圆监测,防止晶圆出现重叠、错位等情况。
60.具体的,启动气缸143带动移动板142横向移动,从而带动光电传感器81横向位移;当第七电机147启动时,带动第七丝杆145旋转,从而通过第七丝杆螺母146带动监测支架82在第七丝杆145上沿第七滑轨144纵向位移。
61.具体的,先将光电传感器81向右侧偏移,使晶圆放置于第二晶圆托篮7上;当晶圆放置于第二晶圆托篮7上后,光电传感器81向左侧位移至晶圆处,从前向后位移,依次对晶圆监测。
62.如图6-7所示,第四丝杆机构9包括:竖直连接在机架1上的两个第四滑轨91,第四滑轨91上连接有第四滑块92,竖直连接在机架 1上的第四丝杆93,第四丝杆93上连接有第四丝杆螺母,第四滑块 92和第四丝杆螺母与抬升机构10连接;第四丝杆93与第四电机94 传动连接,第四电机94连接于机架1上。
63.具体的,当第四电机94启动时,带动第四丝杆93旋转,从而通过第四丝杆螺母带动抬升机构10沿第四滑轨91上下位移。
64.如图6-7所示,抬升机构10包括:连接于第五丝杆机构11底部前后两侧位置的两组轴接机构,以及与一侧轴接机构连接的、用于上下位移的第六丝杆机构。
65.具体的,与第四丝杆机构9连接的框架101,连接在框架101内的第六丝杆102,连接于第六丝杆102上的第六丝杆螺母103,与第六丝杆螺母103连接、且与框架101内契合的限位板104,连接在限位板104上、且穿过框架101顶部的两个支撑柱105,框架101顶部、于上料侧连接有两个第一轴接座106,第一轴接座106内轴接有第一连接件107,支撑柱105顶部连接有连接板108,连接板108上连接有两个第二轴接座109,第二轴接座109内轴接有第二连接件110,第一连接件107和第二连接件110顶部连接有第五丝杆机构11,框架101上连接有与第六丝杆102传动的第六电机1021。
66.本实施例的框架101与第四滑块92和第四丝杆螺母连接。
67.具体的,当第六电机1021启动时,带动第六丝杆102旋转,从而通过第六丝杆螺母103带动限位板104和支撑柱105上下移动;支撑柱105上移,使第五丝杆机构11整体绕第一轴接座106和第一轴接座106的轴接点摆动倾斜。
68.如图4所示,第五丝杆机构11包括:连接于第一连接件107和第二连接件110顶部的倾斜平台111,倾斜平台111上纵向连接有两个第五滑轨112,第五滑轨112上连接有第五滑块113,倾斜平台111 上纵向连接有第五丝杆114,第五丝杆114上连接有第五丝杆螺母 115,第五丝杆114与第五电机116传动连接,第五电机116连接于倾斜平台111上,第五滑块113和第五丝杆螺母115上连接有第二气爪支架117,第二气爪支架117与第一气爪支架122连接。
69.具体的,当第五电机116启动时,带动第五丝杆114旋转,从而通过第五丝杆螺母115带动气爪支架117沿第五滑轨112纵向位移,实现气爪机构12的上下料。
70.工作原理:将第一托篮支架51通过第三丝杆机构13前移,将前道工序的第一托篮本体52以及晶圆放置于第一托篮支架51上,再通过第三丝杆机构13后移复位;通过第一丝杆机构2将抱片机构本体 33左移至第一托篮本体52的正上方、并使第一托篮本体52为松开状态;通过第二丝杆机构4使举片机构本体63上移,将第一托篮本体52上的晶圆托起,并穿过抱片机构本体33,将抱片机构本体33 启动为夹紧状态,下移举片机构本体63,使举片机构本体63上的晶圆放置于夹紧状态下的抱片机构本体33内,继续下移举片机构本体 63复位;通过第一丝杆机构2将抱片机构本体33左移至第二托篮本体72正上方,通过第二丝杆机构4使举片机构本体63上移,将抱片机构本体33上的晶圆托起,将抱片机构本体33启动为松开状态,下移举片机构本体63,使举片机构本体63上的晶圆放置于第二托篮本体72内,继续下移举片机构本体63复位;通过十字滑动机构14带动监测机构8对第二托篮本体72内的晶圆监测;通过第五丝杆机构 11带动平行开闭型气爪121后移,平行开闭型气爪121将第二托篮本体72夹紧,通过第四丝杆机构9带动平行开闭型气爪121上移,通过抬升机构10带动平
行开闭型气爪121倾斜,通过第五丝杆机构 11带动平行开闭型气爪121后移,将第二托篮本体72放入甩干机内;湿法清洗甩干完成后,通过本实施例的自动导片上料机构将第二托篮本体72从甩干机内取出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1