洁净环境用低扬程电动葫芦的制作方法
1.本实用新型涉及电动葫芦技术领域,具体为一种洁净环境用低扬程电动葫芦。
背景技术:
2.洁净室是指能将一定空间范围内空气中的悬浮微粒、细菌等污染物排除,并将室内的温湿度、洁净度、压力、气流速度及经典等影响生产的环境因素控制在某一设计需求范围内,而给予特别设计的房间。也就是说不论外面空气条件如何变化,其室内均能具有维持所设定的洁净度、温湿度、压力等生产所需环境因素性能的特性。针对这种环境下使用的电动葫芦称之为“洁净环境用电动葫芦”。
3.现有的电动葫芦自身带有起升限位装置,当吊钩达到一定高度限制时,碰触到限位装置会自动停下来,但是现有电动葫芦的起升限位装置一般只有上升保护限位没有下限位装置。这样会导致吊钩移动会与接触物直接接触,一旦吊钩下移放到最低位置会直接碰触到物体或者地面,一方面会影响其运行以及起吊精度,另一方面还会导致吊钩出现损坏,降低其使用安全性。
技术实现要素:
4.本实用新型的目的在于提供一种洁净环境用低扬程电动葫芦,以解决上述背景技术中提出的不足之处。
5.为实现上述实用新型目的,本实用新型采用如下技术方案:
6.本实用新型提供一种洁净环境用低扬程电动葫芦,包括起升电机,所述起升电机上设置有安全限位机构,所述安全限位机构包括第一减速箱,所述第一减速箱的输入轴与起升电机的输出轴联接,所述第一减速箱具有第一输出轴,并且所述第一输出轴驱动有凸轮限位组件;
7.所述凸轮限位组件包括设置其内腔的四个同轴转动的触点凸轮以及对应各个触点凸轮的触点开关,且所述触点凸轮均装配在第一输出轴上,各个所述触点凸轮被第一输出轴驱动转动一周时仅触发一次其对应的触点开关;
8.所述四个触点开关分别用以向起升电机发出“上停止”“上减速”“下减速”“下停止”的信号;所述起升电机完成一次起升高度行程时,所述输出轴恰好转动一周。
9.优选地,所述第一减速箱还具有一个与所述起升电机的输出轴同步转动的第二输出轴,所述第二输出轴连接有超速开关。
10.优选地,所述第一减速箱还具有一个用以连接编码器的第三输出轴,所述编码器与起升电机的变频器连接。
11.优选地,所述凸轮限位组件还包括用以调节各所述触点凸轮在第一输出轴上初始角度的调节螺栓。
12.优选地,所述触点凸轮周向设有与调节螺栓的螺纹相匹配的调节齿,以使得所述调节螺栓转动时驱动所述触点凸轮相对第一输出轴转动。
13.优选地,所述调节螺栓的外端设置有滑动块,所述滑动块与调节螺栓之间设置有轴承,所述滑动块与凸轮限位组件内腔设置的滑动杆滑动相连,所述滑动块的一端设置有弹簧,所述调节螺栓的底端与限位凸轮组件内腔的滑动槽滑动相连。
14.与现有技术相比,以上一个或多个技术方案存在以下有益效果:
15.本实用新型提供一种洁净环境用低扬程电动葫芦,新增安全限位机构用于对电动葫芦的运行高度进行上下限位,相比传统控制方式具有更高的控制精度,让电动葫芦在一定高度范围内来实现上下减速、上下停止的功能、取消原有的接触式限位方式,避免电动葫芦与地面以及横梁直接接触造成损坏,还可以减少因摩擦或者冲撞产生的细屑。
附图说明
16.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
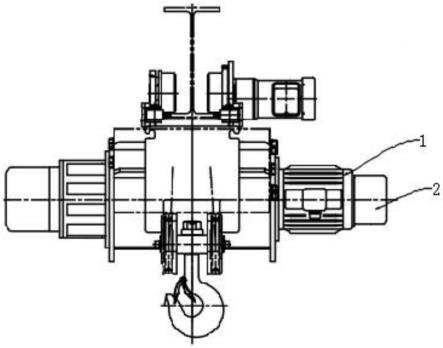
17.图1是本实用新型主视示意图;
18.图2是本实用新型安全限位机构示意图;
19.图3是本实用新型凸轮限位组件立体结构示意图;
20.图4是本实用新型凸轮限位组件内部示意图;
21.图5是本实用新型调节螺栓侧视示意图。
22.图中:
23.1、起升电机;
24.2、第一减速箱;201、第一输出轴;202、第二输出轴;203、第三输出轴;
25.3、凸轮限位组件;301、触点凸轮;302、触点开关;303、调节螺栓;304、滑动块;305、滑动杆;306、弹簧;307、滑动槽;
26.4、超速开关;
27.5、编码器。
具体实施方式
28.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
29.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤或单元。
30.在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
31.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本技术中的具体含义。
32.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”、“套接”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
33.如说明书附图图1-图5,本实用新型提供一种洁净环境用低扬程电动葫芦,包括起升电机1,起升电机1上设置有安全限位机构,安全限位机构包括第一减速箱2,第一减速箱2内设减速齿轮,第一减速箱2直接与起升电机1的输出轴相连,其作用是将电机的输出轴输出转换成三个同轴输出,第一减速箱2的输入轴与起升电机1的输出轴联接,第一减速箱2具有第一输出轴201,并且第一输出轴201驱动有凸轮限位组件3;
34.凸轮限位组件3包括设置其内腔的四个同轴转动的触点凸轮301以及对应各个触点凸轮301的触点开关302,且触点凸轮301均装配在第一输出轴201上,各个触点凸轮301被第一输出轴201驱动转动一周时仅触发一次其对应的触点开关302;
35.具体地,如图2所示,通过起升电机1的旋转带动第一减速箱2齿轮旋转,进而带动第一输出轴201的旋转,经过第一减速箱2减速齿轮与触点凸轮301的速比,将起升电机1的高速转化为触点凸轮301运转的低速;
36.四个触点开关302分别用以向起升电机1发出“上停止”“上减速”“下减速”“下停止”的信号;起升电机1完成一次起升高度行程时,输出轴恰好转动一周,当起升电机1驱动第一输出轴201旋转带动触点凸轮301发生同步转动,当触点凸轮301的凸起部分触发到触点开关302,此时触点开关302触点动作,发出对应的信号,凸轮限位组件3具有4组独立触点,可以为电动葫芦提供上停止、上减速、下减速、下停止信号,不但功能更强而且安全系数更高,从而取消原有接触式上限位,新增安全限位机构用于对电动葫芦的运行高度进行上下限位,相比传统控制方式具有更高的控制精度,让电动葫芦在一定高度范围内来实现上下减速、上下停止的功能、取消原有的接触式限位方式,避免电动葫芦与地面以及横梁直接接触造成损坏,还可以减少因摩擦或者冲撞产生的细屑。
37.如图2所示,本实施例中,第一减速箱2还具有一个与起升电机1的输出轴同步转动的第二输出轴202,第二输出轴202连接有超速开关4,超速开关4主要用于起升电机1的超速保护,如果起升电机1运行速度过快,超过了正常运行的速度,超速开关4便会自动切断电源,起升电机1停止运动,避免出现速度超出负荷,损伤设备的使用寿命,可有效提高电动葫芦的洁净度、准确度及安全性。
38.如图2所示,本实施例中,第一减速箱2还具有一个用以连接编码器5的第三输出轴203,编码器5与起升电机1的变频器连接,编码器5分别与第三输出轴203、变频器的连接组成闭环控制,闭环控制相比传统的控制方式有更高的控制精度,编码器5随第三输出轴203同步旋转,可以随时采集起升电机1的动态情况反馈给变频器,采用高分辨率编码器5可以
获得更高的控制精度、特别是在低速时,防止电流过小而转矩不够或者因为堵转起升电机1失速,反向电动势不够而驱动电流过流,防止烧损元件或者起升电机1。
39.如图5所示,本实施例中,凸轮限位组件3还包括用以调节各触点凸轮301在第一输出轴201上初始角度的调节螺栓303,通过旋转调节螺栓303能够驱动相对应的触点凸轮301发生转动,对触点凸轮301的角度进行调节,由于各触点凸轮301需要转动与触点开关302触发的时间不同,因此需要通过调节螺栓303调节各触点凸轮301之间的转动角度,使得各个信号触发时间点不相同。
40.具体地,如图5所示,触点凸轮301周向设有与调节螺栓303的螺纹相匹配的调节齿,以使得调节螺栓303转动时驱动触点凸轮301相对第一输出轴201转动,当控制调节螺栓303转动时通过螺纹配合驱动触点凸轮301发生转动,进而调节触点凸轮301的转动角度。
41.如图5所示,本实施例中,调节螺栓303的外端设置有滑动块304,滑动块304与调节螺栓303之间设置有轴承,滑动块304与凸轮限位组件3内腔设置的滑动杆305滑动相连,滑动块304的一端设置有弹簧306,调节螺栓303的底端与限位凸轮组件内腔的滑动槽307滑动相连,通过滑动块304在滑动杆305上的滑动能够控制调节螺栓303与凸轮盘之间的间距,进而能够将调整角度后的调节螺栓303移开凸轮盘表面,使得凸轮盘不受调节螺栓303限制受到驱动轴的驱动影响发生转动,需要调整时在将调节螺栓303移动与凸轮盘连接驱动其发生转动,在调整凸轮盘角度后通过滑动杆305上的弹簧306能够驱动调节螺栓303自动复位,并且在运动过程中调节螺栓303的底端是在滑动槽307内滑动。
42.以上所述仅为本实用新型的优选实施例而已,本实用新型中未述及的部分采用或借鉴已有技术即可实现。当然,上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1