一种全自动曝光机用上下料机构的制作方法
1.本实用新型涉及阻焊曝光机领域,具体是一种全自动曝光机用上下料机构。
背景技术:
2.公开号为cn215679038u的专利文献公开了一种双面自动曝光机,包括机体,所述机体上表面一侧设有传送轨道,所述机体上表面中部设有曝光机构,所述曝光机构包括下玻璃、上玻璃、下uvled曝光灯、上uvled曝光灯和升降机构,所述下玻璃上表面设有下底片,所述上玻璃下表面设有上底片。
3.从该专利文献的具体实施方式可总结出进料机械臂81、第一吸料升降气缸 83、多个进料吸盘84和传送轨道2可构成上料机构,出料机械臂91、第二吸料升降气缸93、多个出料吸盘94和传送轨道2可构成下料机构,通过上料机构完成将进料滚筒82上待曝光的pcb板上料到曝光机构3的工作,通过下料机构完成将曝光机构3上完成曝光的pcb板下料到出料滚筒92上的工作。
4.上料机构和下料机构共用传送轨道2,上料机构和下料机构可概括成上下料机构,该上下料机构存在的缺点是1、多个进料吸盘84的相对位置不可调节,使得多个进料吸盘84只能适用特定尺寸规格的pcb板,不能适用其他尺寸规格pcb 板,适用性较低;2、多个出料吸盘94的相对位置不可调节,同理多个进料吸盘 84一样存在适用性低的缺点,因此如何适用不同尺寸规格pcb板是本领域技术人员需要解决的技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种全自动曝光机用上下料机构,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种全自动曝光机用上下料机构,包括x轴向驱动模组和左吸取模组,所述左吸取模组包括移动横梁、间距调节组件、左吸盘列和右吸盘列,所述移动横梁横跨设置在x轴向驱动模组上,所述左吸盘列和右吸盘列相对设置且均通过间距调节组件安装在移动横梁上,所述x轴向驱动模组驱动移动横梁通过间距调节组件带动左吸盘列和右吸盘列沿x轴向运动。
8.进一步地,所述间距调节组件包括前悬臂、后悬臂、左l形滑架、右l形滑架、左y轴向撑开定位组件和右y轴向撑开定位组件,所述前悬臂和后悬臂均安装在移动横梁上,所述左吸盘列和右吸盘列分别安装在左l形滑架和右l 形滑架上,所述左l形滑架可滑动连接在前悬臂和后悬臂的左部之间,所述右l 形滑架可滑动连接在前悬臂和后悬臂的右部之间,所述左y轴向撑开定位组件和右y轴向撑开定位组件分别安装在左l形滑架上和右l形滑架上,所述左y 轴向撑开定位组件和右y轴向撑开定位组件均位于前悬臂的后侧以及后悬臂的前侧之间。
9.进一步地,所述左y轴向撑开定位组件包括前气缸、后气缸、前顶块和后顶块,所述
前气缸和后气缸的输出部背向设置,所述前顶块和后顶块分别安装在前气缸和后气缸的输出部上且分别与前悬臂的后侧和后悬臂的前侧相对设置,所述前气缸和后气缸分别驱动前顶块和后顶块做相向运动或背向运动。
10.进一步地,还包括前固定加强模块和后固定加强模块,所述前固定加强模块和后固定加强模块互为镜像件,所述前固定加强模块安装在前悬臂和移动横梁之间,所述后固定加强模块安装在后悬臂和移动横梁之间。
11.进一步地,所述前固定加强模块和后固定加强模块互为镜像件,所述前固定加强模块包括凹形座、左l形座和右l形座,所述前悬臂与凹形座的凹口处固定连接,所述左l形座和右l形座均安装在前悬臂和移动横梁之间。
12.进一步地,所述左吸盘列包括条块、连接组件和真空吸盘一,所述连接组件可拆卸连接在条块上,所述真空吸盘一安装连接组件上,所述连接组件和真空吸盘一分别设置多组且数量对应,多组所述连接组件和多组真空吸盘一沿条块的长度方向排列分布。
13.进一步地,所述连接组件包括连接板和t型螺母,所述条块的上部开设有t 型槽,所述t型槽沿条块的长度方向延伸,所述t型螺母配合在t型槽内,所述t型螺母上开设有螺纹孔,所述连接板一端开设有吸盘装配位,所述真空吸盘一安装在吸盘装配位,所述连接板另一端开设有通孔,所述通孔通过螺栓与螺纹孔连接。
14.进一步地,所述条块的下部内开设有气路,所述气路沿条块的长度方向延伸,所述气路的一端封口,所述条块的侧壁上开设有多个均与气路连通的气孔,多个所述气孔上分别安装有气嘴一,多个所述真空吸盘一的上端分别安装有气嘴二,多个所述气嘴二分别通过分支气管与多个气嘴一连接。
15.进一步地,还包括右吸取模组,所述左吸取模组和右吸取模组的结构相同,所述右吸取模组安装在x轴向驱动模组上,所述x轴向驱动模组可分别驱动左吸取模组和右吸取模组沿x轴向运动。
16.进一步地,还包括中吸盘列,所述中吸盘列安装在移动横梁上,所述中吸盘列包括非接触式吸料组件和真空吸盘二,所述非接触式吸料组件和真空吸盘二均安装在移动横梁上,所述非接触式吸料组件和真空吸盘二分别设置多组且均沿移动横梁的长度方向排列分布。
17.上一个工位将pcb板输送到曝光机构中时,pcb板位于左吸盘列和右吸盘列均的正下方,x轴向驱动模组驱动移动横梁通过间距调节组件带动左吸盘列和右吸盘列联动pcb板沿左右方向运动到曝光机构中,左吸盘列和右吸盘列均停止吸取使pcb板下落到曝光机构中,x轴向驱动模组驱动移动横梁通过间距调节组件带动左吸盘列和右吸盘列进行复位,完成一个工作周期;
18.本实用新型的有益效果:
19.通过间距调节组件对左吸盘列和右吸盘列的位置进行解锁,这时通过人工带动左吸盘列和右吸盘列沿x轴线运动,可调节左吸盘列和右吸盘列的间距以适应不同尺寸规格的pcb板,调节完毕后,通过间距调节组件对左吸盘列和右吸盘列的位置进行锁定,实现对两者的相对位置进行固定。
20.本实用新型通过设置左吸盘列、右吸盘和间距调节组件,实现适用不同尺寸规格的pcb板。
附图说明
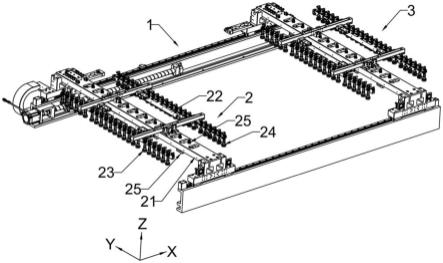
21.图1:一种全自动曝光机用上下料机构的立体示意图。
22.图2:一种全自动曝光机用上下料机构的俯视示意图。
23.图3:一种全自动曝光机用上下料机构的分解示意图。
24.图4:一种全自动曝光机用上下料机构的a处放大示意图。
25.图5:一种全自动曝光机用上下料机构的b处放大示意图。
具体实施方式
26.以下结合附图对本实用新型进行进一步说明:
27.请参照图1和图2,一种全自动曝光机用上下料机构,包括x轴向驱动模组1和左吸取模组2,左吸取模组2安装在x轴向驱动模组1上,x轴向驱动模组 1驱动左吸取模组2沿x轴向运动,左吸取模组2包括移动横梁21、间距调节组件22、左吸盘列23和右吸盘列24,移动横梁21横跨设置在x轴向驱动模组 1上,左吸盘列23和右吸盘列24相对设置且均通过间距调节组件22安装在移动横梁21上,x轴向驱动模组1驱动移动横梁21通过间距调节组件22带动左吸盘列23和右吸盘列24沿x轴向运动。
28.请参照图1和图2,移动横梁21为槽钢结构,移动横梁21的凹口朝下,移动横梁21开设有多个减重通孔211,多个减重通孔211沿移动横梁21的长度方向排列。
29.请参照图3,间距调节组件22包括前悬臂221、后悬臂222、左l形滑架 223、右l形滑架224、左y轴向撑开定位组件225和右y轴向撑开定位组件226,前悬臂221和后悬臂222均安装在移动横梁21上,左吸盘列23和右吸盘列24 分别安装在左l形滑架223和右l形滑架224上,左l形滑架223可滑动连接在前悬臂221和后悬臂222的左部之间,右l形滑架224可滑动连接在前悬臂 221和后悬臂222的右部之间,左y轴向撑开定位组件225安装在左l形滑架 223上,左y轴向撑开定位组件225和右y轴向撑开定位组件226均位于前悬臂 221的后侧和后悬臂222的前侧之间。
30.前悬臂221和后悬臂222互为镜像件,左l形滑架223和右l形滑架224 互为镜像件,左y轴向撑开定位组件225和右y轴向撑开定位组件226互为镜像件,左y轴向撑开定位组件225可沿y轴向进行撑开以对前悬臂221的左后侧和后悬臂222的左前侧分别进行顶紧,实现对左l形滑架223进行定位,达到对左吸盘列23进行定位的效果,右y轴向撑开定位组件226可沿y轴向进行撑开以对前悬臂221的右后侧和后悬臂222的右前侧分别进行顶紧,实现对右l 形滑架224进行定位,达到对右吸盘列24进行定位的效果。
31.请参照图4,左y轴向撑开定位组件225包括前气缸2251、后气缸2252、前顶块2253和后顶块2254,前气缸2251和后气缸2252的输出部背向设置,前顶块2253和后顶块2254分别安装在前气缸2251和后气缸2252的输出部上且分别与前悬臂221的后侧以及后悬臂222的前侧相对设置,前气缸2251和后气缸2252分别驱动前顶块2253和后顶块2254做相向运动或背向运动。
32.当需要左吸盘列23和右吸盘列24的相对位置以适用不同规格尺寸的pcb 板时,左y轴向撑开定位组件225和右y轴向撑开定位组件226均通过前气缸 2251和后气缸2252分别驱动前顶块2253和后顶块2254沿y轴向进行相向运动,实现对左l形滑架223和右l形滑架224进行解除定位,这时左l形滑架223 和右l形滑架224可沿x轴向滑动,人工驱动左吸盘列
23和右吸盘列24沿x 轴向进行滑动,实现调节左吸盘列23和右吸盘列24的间距,使两者适用不同规格尺寸的pcb板,调节完毕后,左y轴向撑开定位组件225和右y轴向撑开定位组件226均通过前气缸2251和后气缸2252分别驱动前顶块2253和后顶块 2254沿y轴向进行背向运动,使前顶块2253和后顶块2254分别对前悬臂221 的后侧和后悬臂222的前侧进行顶紧,实现对左l形滑架223和右l形滑架224 进行定位,这时对左吸盘列23和右吸盘列24施力不能使两者进行移动,实现对左吸盘列23和右吸盘的间距进行固定。
33.请参照图4,间距调节组件22还包括前固定加强模块227和后固定加强模块228,前固定加强模块227安装在前悬臂221和移动横梁21之间,用于增强前悬臂221和移动横梁21连接的牢靠度,防止左y轴向撑开定位组件225和右y轴向撑开定位组件226对前悬臂221的施力使其与移动横梁21的相对位置发生改变,后固定加强模块228安装在后悬臂222和移动横梁21之间,用于增强后悬臂222和移动横梁21连接的牢靠度,防止左y轴向撑开定位组件225和右 y轴向撑开定位组件226对后前悬臂221施力使其与移动横梁21的相对位置发生改变。
34.请参照图4,前固定加强模块227和后固定加强模块228互为镜像件,前固定加强模块227包括凹形座2271、左l形座2272和右l形座2273,前悬臂221 与凹形座2271的凹口处固定连接,左l形座2272和右l形座2273均安装在前悬臂221和移动横梁21之间。
35.请参照图5,左吸盘列23包括条块231、连接组件232和真空吸盘一233,连接组件232可拆卸连接在条块231上,真空吸盘一233安装连接组件232上,连接组件232和真空吸盘一233分别设置多组且数量对应,多组连接组件232 和多组真空吸盘一233沿条块231的长度方向排列分布。
36.请参照图5,连接组件232包括连接板2321和t型螺母2322,条块231的上部开设有t型槽2311,t型槽2311沿条块231的长度方向延伸,t型螺母2322 配合在t型槽2311内,t型螺母2322上开设有螺纹孔,连接板2321一端开设有吸盘装配位,真空吸盘一233安装在吸盘装配位,吸盘装配位为安装孔,连接板2321另一端开设有通孔,通孔通过螺栓与螺纹孔连接。
37.请参照图5,条块231的下部内开设有气路2312,气路2312沿条块231的长度方向延伸,气路2312的一端封口,气路2312的另一端安装有主气嘴,主气嘴通过主气管与真空发生器连接,条块231的侧壁上开设有多个均与气路2312 连通的气孔,多个气孔上分别安装有气嘴一234,多个真空吸盘一233的上端分别安装有气嘴二235,多个气嘴二235分别通过分支气管与多个气嘴一234连接。
38.左l形滑架223对应气嘴一234的位置处开设有避让缺口。
39.请参照图1至图3,左吸取模组2还包括中吸盘列25,中吸盘列25安装在移动横梁21上。当pcb板为pcb铝基板时,x轴向驱动模组1驱动移动横梁21 通过间距调节组件22带动左吸盘列23和右吸盘列24联动pcb铝基板进行高速移动的过程中,因为pcb铝基板的重量较重,pcb铝基板可能会脱离左吸盘列 23和右吸盘列24的吸力继而掉落,因此通过设置中吸盘列25来增加pcb铝基板的吸取力度,防止pcb铝基板在高速移动过程中发生掉落。
40.请参照图3,中吸盘列25包括非接触式吸料组件251和真空吸盘二252,非接触式吸料组件251和真空吸盘二252均安装在移动横梁21上,非接触式吸料组件251和真空吸盘二252分别设置多组且均沿移动横梁21的长度方向排列分布。
41.非接触式吸料组件251包括连接座和伯努利吸盘,伯努利吸盘通过连接座安装在
移动横梁21下。
42.请参照图1和图2,还包括右吸取模组3,左吸取模组2和右吸取模组3的结构相同,右吸取模组3安装在x轴向驱动模组1上,x轴向驱动模组1可分别驱动左吸取模组2和右吸取模组3沿x轴向运动,只设置左吸取模组2可以完成pcb板的上料和下料工作,增加设置右吸取模组3可以使左吸取模组2负责上料工作,右吸取模组3负责下料工作,从而更加高效地完成pcb板的上料和下料工作,具体体现在当左吸取模组2对待曝光的pcb板进行吸取时,右吸取模组3同时对曝光机构中已曝光的pcb板进行吸取,接着当左吸取模组2带动 pcb板运动到曝光机构中的过程中,右吸取模组3同时带动已曝光的pcb板运动到下料位,在x轴向驱动模组1驱动左吸取模组2和右吸取模组3分别运动到待曝光的pcb板和已曝光的pcb板正上方时,左吸取模组2与待曝光的pcb板之间的间隔较小,左吸取模组2通过真空吸附作用可直接对该pcb板进行吸取,同理右吸取模组3与已曝光的pcb板之间的间隔较小,右吸取模组3通过真空吸附作用可直接对该pcb板进行吸取。
43.以上并非对本实用新型的技术范围作任何限制,凡依据本实用新型技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本实用新型的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1