物料夹取装置及T型机械手的制作方法
物料夹取装置及t型机械手
技术领域
1.本实用新型属于机械手技术领域,具体涉及一种物料夹取装置及t型机械手。
背景技术:
2.目前,t型机械手常用于替代人工进行物料的搬运,通过t型机械手的物料夹取装置能够将物料夹起,从一个位置搬运移动至另一个位置后放下。
3.但是在实际的使用过程中,通常需要在搬运过程中对物料进行不同角度的翻转,以满足不同的工作生产需求,现有的物料夹取装置仅能够对物料进行一个方向上的90
°
翻转,难以满足目前的使用需求。
4.因此,需要设计一种能够多角度对物料进行翻转的物料夹取装置及t型机械手来解决目前所面临的技术问题。
技术实现要素:
5.针对现有技术中所存在的不足,本实用新型提供了一种能够多角度对物料进行翻转的物料夹取装置及t型机械手。
6.本实用新型的技术方案为:物料夹取装置,包括支撑柱,所述支撑柱的底部铰接有翻转臂,所述支撑柱的一侧铰接有翻转气缸,所述翻转气缸与所述翻转臂相铰接,所述翻转臂的底部转动设置有架板,所述架板上对称设置有支撑杆,所述支撑杆上设置有用于驱动所述架板相对于所述翻转臂旋转的旋转驱动部件;所述支撑杆的两端分别设置有夹爪机构。
7.所述夹爪机构具有夹爪壳体,所述夹爪壳体的内部对称设置有两个夹臂,所述夹臂的中部与所述夹爪壳体转动连接,所述夹臂的下端内侧固定设置有夹板,所述夹爪壳体的顶部设置有驱动所述夹臂夹紧或释放的夹紧驱动部件。
8.所述夹紧驱动部件具有夹紧气缸,所述夹紧气缸的活塞杆端部固定设置有连接块,所述连接块的两端均铰接有连杆,所述连杆上与所述连接块相背离的一端与所述夹臂的上端相铰接。
9.所述夹板上与所述夹臂相背离的一侧开设有圆弧形凹槽。
10.所述旋转驱动部件具有旋转气缸,所述旋转气缸通过支架固定设置在所述支撑杆的底部,所述旋转气缸与所述翻转臂传动连接。
11.所述架板的顶部固定设置有转筒,所述翻转臂的底部固定设置有安装板,所述安装板的底部固定设置有转轴,所述转轴与所述旋转气缸传动连接。
12.所述支撑柱的顶端一侧固定设置有铰座,所述翻转气缸的上端与所述铰座相铰接。
13.t型机械手,具有如上任一项所述的物料夹取装置。
14.本实用新型的有益效果:本实用新型中,夹爪机构用于夹紧固定物料,翻转气缸驱使翻转臂相对于支撑柱转动,即可带动夹爪机构对物料进行翻转,同时通过旋转驱动部件
能够驱使夹爪机构带动物料进行旋转,对物料进行多角度灵活调节,满足不同的工作生产需求。
附图说明
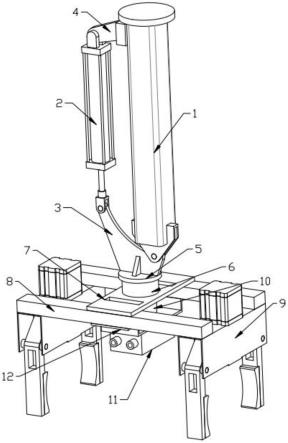
15.图1为本实用新型中物料夹取装置的结构示意图。
16.图2为本实用新型中夹爪机构的结构示意图之一。
17.图3为本实用新型中夹爪机构的结构示意图之二。
18.图4为图3中a-a处的剖面图。
具体实施方式
19.现在将参照附图来详细描述本实用新型的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。本实用新型可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本实用新型透彻且完整,并且向本领域技术人员充分表达本实用新型的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示例性的,而不是作为限制。
20.本实用新型中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
21.如图1所示,物料夹取装置,包括支撑柱1,支撑柱1的底部铰接有翻转臂3,支撑柱1的一侧铰接有翻转气缸2,翻转气缸2与翻转臂3相铰接,翻转臂3的底部转动设置有架板7,架板7上对称设置有支撑杆8,支撑杆8上设置有用于驱动架板7相对于翻转臂3旋转的旋转驱动部件;支撑杆8的两端分别设置有夹爪机构9;在本实施例中,夹爪机构9用于夹紧固定物料,翻转气缸2驱使翻转臂3相对于支撑柱1转动,即可带动夹爪机构9对物料进行翻转,同时通过旋转驱动部件能够驱使夹爪机构9带动物料进行旋转,对物料进行多角度灵活调节,满足不同的工作生产需求。
22.作为夹爪机构9具体的一种实施方式,如图2至4所示,夹爪机构9具有夹爪壳体901,夹爪壳体901的内部对称设置有两个夹臂903,夹臂903的中部与夹爪壳体901转动连接,夹臂903的下端内侧固定设置有夹板904,夹爪壳体901的顶部设置有驱动夹臂903夹紧或释放的夹紧驱动部件;通过夹紧驱动部件驱使夹臂903往复摆动,能够实现对物料进行夹紧释放,其中夹板904与物料相配合,能够稳定对物料进行夹持。
23.在一些实施例中,夹紧驱动部件具有夹紧气缸902,夹紧气缸902的活塞杆端部固定设置有连接块905,连接块905的两端均铰接有连杆906,连杆906上与连接块905相背离的一端与夹臂903的上端相铰接,通过夹紧气缸902驱使连接块905上下移动,连接块905通过连杆906拉动夹臂903的上端,带动夹臂903进行摆动,实现对物料的夹紧或释放。
24.在一些实施例中,夹板904上与夹臂903相背离的一侧开设有圆弧形凹槽,通过圆弧形凹槽能够圆柱状的物料外侧相匹配,增大夹板904与圆柱状的物料之间的接触面积,能
够稳定夹持固定圆柱状的物料。
25.在一些实施例中,旋转驱动部件具有旋转气缸11,旋转气缸11通过支架12固定设置在支撑杆8的底部,支架12为几字形支架,支架12的两端分别与两根支撑杆8的底部固定连接,旋转气缸11固定在支架12的底部,旋转气缸11的输出轴与翻转臂3传动连接,通过旋转气缸11控制器输出轴转动,即可驱使架板7带动夹爪机构9相对于翻转臂3进行转动。
26.在一些实施例中,架板7的顶部固定设置有转筒6,翻转臂3的底部固定设置有安装板5,安装板5的底部固定设置有转轴6,转轴6、通过轴承与转筒6的内侧转动连接,转轴10与旋转气缸11传动连接。
27.在一些实施例中,支撑柱1的顶端一侧固定设置有铰座4,翻转气缸2的上端与铰座相铰接。
28.在一些实施例中,公开了一种t型机械手,其具有上述任一实施例中的物料夹取装置。
29.至此,已经详细描述了本实用新型的各实施例。为了避免遮蔽本实用新型的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
30.以上所述实施例仅表达了本实用新型的部分实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1