一种斗臂车斗臂系统及伸缩臂式绝缘斗臂车的制作方法
本技术涉及绝缘斗臂车,尤其涉及一种斗臂车斗臂系统及伸缩臂式绝缘斗臂车。
背景技术:
1、目前可用于高空带电检修作业的登高工具主要是绝缘斗臂车。现有的绝缘斗臂车的结构通常如申请公布号为cn114659193a的中国发明专利申请文件所公开的空调式绝缘斗臂车的结构,包括车体,车体上安装有旋转底座,旋转底座上铰接有伸缩臂以及用于控制伸缩臂俯仰动作的伸缩油缸,伸缩臂的一端铰接连接在旋转底座上,另一端与作业斗固定连接,俯仰油缸的一端铰接连接在旋转底座上,另一端与伸缩臂铰接连接,伸缩臂具有两个以上的臂节,可以通过另一液压缸控制臂节的伸出与缩回,进而调节伸缩臂的长度。
2、在实际应用中经常会遇到作业斗需要沿墙壁或杆体上下运动的情况,为了调节作业位置,需要反复调节两个油缸的动作以调节伸缩臂的俯仰与伸缩,而现有绝缘斗臂车需要通过人为对两个油缸的动作进行调节,不仅调节难度大、工作效率低,而且在调节过程中稍不注意还有可能导致作业斗撞到墙壁或杆体上的情况发生。
技术实现思路
1、本实用新型的目的在于提供一种斗臂车斗臂系统,以解决现有斗臂车斗臂系统在调节作业斗高度时需要人为调节俯仰油缸与伸缩油缸的伸缩动作,调节难度大且效率低的问题;本实用新型的目的还在于提供一种伸缩臂式绝缘斗臂车,以解决现有绝缘斗臂车需要人为调节俯仰油缸与伸缩油缸的伸缩动作,调节难度大、工作效率低且存在安全隐患的问题。
2、为实现上述目的,本实用新型斗臂车斗臂系统采用如下技术方案:
3、一种斗臂车斗臂系统,包括伸缩臂、用于控制伸缩臂俯仰动作的俯仰油缸以及用于控制伸缩臂伸缩动作的伸缩油缸,伸缩臂上固定连接有作业斗,所述斗臂车斗臂系统还包括控制器和距离传感器,距离传感器设置在作业斗上且与控制器通讯连接,俯仰油缸和/或伸缩油缸与控制器通讯连接,控制器中存储有控制程序以根据距离传感器检测的数值控制对应油缸伸缩进而实现作业斗在上下方向上直线移动。
4、有益效果:本实用新型斗臂车斗臂系统在现有斗臂车斗臂系统的基础上进行改进,通过在作业斗上设置距离传感器实时检测作业斗与墙壁或杆体之间的距离并反馈给控制器,使俯仰油缸和/或伸缩油缸也与控制器通讯连接,这样在俯仰油缸与伸缩油缸的其中一个缩回时控制器可以根据距离传感器的检测数值实时控制另一个油缸缩回以使作业斗和墙壁或杆体的距离保持不变,在俯仰油缸与伸缩油缸的其中一个伸出时控制器可以根据距离传感器的检测数值实时控制另一个油缸伸出以使作业斗和墙壁或杆体的距离保持不变,从而实现作业斗沿墙壁或杆体上下直线运动。需要调节作业斗的高度时工作人员只需要操作俯仰油缸或伸缩油缸的其中一个,另一个便可在控制器的控制下自动完成伸缩动作,或者,当两个油缸均与控制器通讯连接时控制器可同时控制两个油缸的伸缩动作,以实现作业斗在上下方向上直线移动,与现有技术相比,大大降低了调节难度,提高了工作效率,而且使油缸伸缩动作更加精准,安全性更高。
5、进一步地,距离传感器设置在作业斗的外侧面上。
6、有益效果:距离传感器需要实时检测作业斗与墙壁或杆体之间的距离并将检测数值发送给控制器,将距离传感器设置在作业斗的外侧面上能够使信号传输更加可靠,保证较高的信号强度。
7、进一步地,作业斗为矩形斗,所述伸缩臂连接在作业斗的其中一个侧面上,作业斗的另外三个外侧面上均设有所述距离传感器。
8、有益效果:在作业斗的三个外侧面上都设有距离传感器,无论三个外侧面中的任何一个与墙壁或杆体相对,均能够检测到作业斗与墙壁或杆体的距离,从而使作业斗的作业角度更加灵活,使用更方便。
9、进一步地,距离传感器与控制器之间为无线通讯,作业斗上设有用于给距离传感器供电的电源。
10、有益效果:距离传感器与控制器之间采用无线通讯,不需要走线,可以降低臂体制造难度。
11、或者,距离传感器与控制器之间通过导线实现通讯连接和供电。
12、有益效果:距离传感器与控制器之间采用有线通讯,能够使信号在传输过程中受干扰较小,从而保证信号传输的准确度。
13、本实用新型伸缩臂式绝缘斗臂车采用如下技术方案:
14、一种伸缩臂式绝缘斗臂车,包括车体,车体上配置有斗臂系统,所述斗臂系统包括伸缩臂、用于控制伸缩臂俯仰动作的俯仰油缸以及用于控制伸缩臂伸缩动作的伸缩油缸,伸缩臂上固定连接有作业斗,所述斗臂系统还包括控制器和距离传感器,距离传感器设置在作业斗上且与控制器通讯连接,俯仰油缸和/或伸缩油缸与控制器通讯连接,控制器中存储有控制程序以根据距离传感器检测的数值控制对应油缸伸缩进而实现作业斗在上下方向上直线移动。
15、有益效果:本实用新型伸缩臂式绝缘斗臂车在现有绝缘斗臂车的基础上进行改进,通过在作业斗上设置距离传感器实时检测作业斗与墙壁或杆体之间的距离并反馈给控制器,使俯仰油缸和/或伸缩油缸也与控制器通讯连接,这样在俯仰油缸与伸缩油缸的其中一个缩回时控制器可以根据距离传感器的检测数值实时控制另一个油缸缩回以使作业斗和墙壁或杆体的距离保持不变,在俯仰油缸与伸缩油缸的其中一个伸出时控制器可以根据距离传感器的检测数值实时控制另一个油缸伸出以使作业斗和墙壁或杆体的距离保持不变,从而实现作业斗沿墙壁或杆体上下直线运动。需要调节作业斗的高度时工作人员只需要操作俯仰油缸或伸缩油缸的其中一个,另一个便可在控制器的控制下自动完成伸缩动作,或者,当两个油缸均与控制器通讯连接时控制器可同时控制两个油缸的伸缩动作,以实现作业斗沿墙壁或杆体上下直线运动,与现有技术相比,大大降低了调节难度,提高了工作效率,而且使油缸伸缩动作更加精准,安全性更高。
16、进一步地,距离传感器设置在作业斗的外侧面上。
17、有益效果:距离传感器需要实时检测作业斗与墙壁或杆体之间的距离并将检测数值发送给控制器,将距离传感器设置在作业斗的外侧面上能够使信号传输更加可靠,保证较高的信号强度。
18、进一步地,作业斗为矩形斗,所述伸缩臂连接在作业斗的其中一个侧面上,作业斗的另外三个外侧面上均设有所述距离传感器。
19、有益效果:在作业斗的三个外侧面上都设有距离传感器,无论三个外侧面中的任何一个与墙壁或杆体相对,均能够检测到作业斗与墙壁或杆体的距离,从而使作业斗的作业角度更加灵活,使用更方便。
20、进一步地,距离传感器与控制器之间为无线通讯,作业斗上设有用于给距离传感器供电的电源。
21、有益效果:距离传感器与控制器之间采用无线通讯,不需要走线,可以降低臂体制造难度。
22、或者,距离传感器与控制器之间通过导线实现通讯连接和供电。
23、有益效果:距离传感器与控制器之间采用有线通讯,能够使信号在传输过程中受干扰较小,从而保证信号传输的准确度。
技术特征:
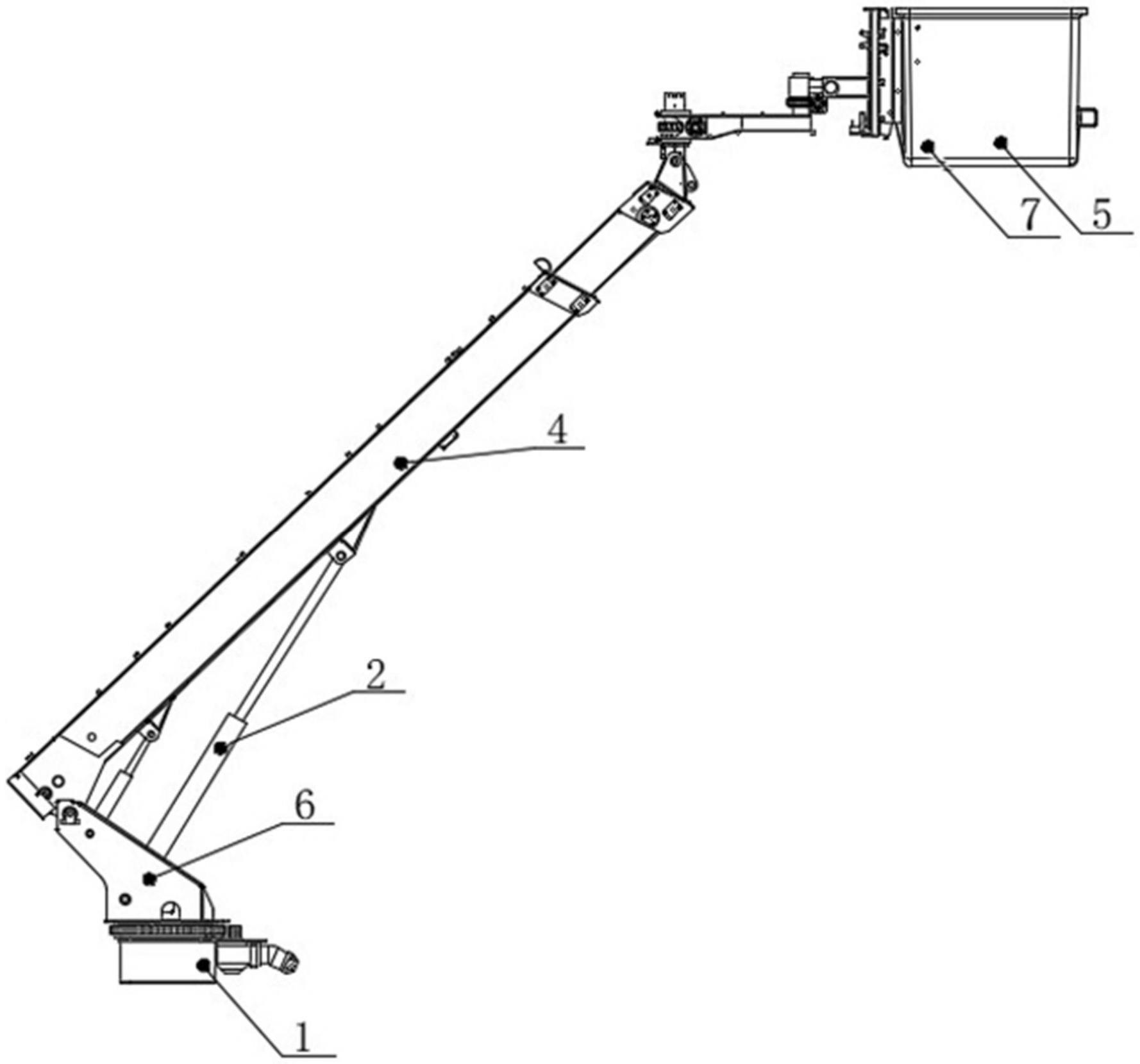
1.一种斗臂车斗臂系统,包括伸缩臂(4)、用于控制伸缩臂(4)俯仰动作的俯仰油缸(2)以及用于控制伸缩臂(4)伸缩动作的伸缩油缸,伸缩臂(4)上固定连接有作业斗(5),其特征在于:所述斗臂车斗臂系统还包括控制器和距离传感器(7),距离传感器(7)设置在作业斗(5)上且与控制器通讯连接,俯仰油缸(2)和/或伸缩油缸与控制器通讯连接,控制器中存储有控制程序以根据距离传感器检测的数值控制对应油缸伸缩进而实现作业斗在上下方向上直线移动。
2.根据权利要求1所述的斗臂车斗臂系统,其特征在于:距离传感器(7)设置在作业斗(5)的外侧面上。
3.根据权利要求2所述的斗臂车斗臂系统,其特征在于:作业斗(5)为矩形斗,所述伸缩臂(4)连接在作业斗(5)的其中一个侧面上,作业斗(5)的另外三个外侧面上均设有所述距离传感器(7)。
4.根据权利要求1-3任意一项所述的斗臂车斗臂系统,其特征在于:距离传感器(7)与控制器之间为无线通讯,作业斗(5)上设有用于给距离传感器(7)供电的电源。
5.根据权利要求1-3任意一项所述的斗臂车斗臂系统,其特征在于:距离传感器(7)与控制器之间通过导线实现通讯连接和供电。
6.一种伸缩臂式绝缘斗臂车,包括车体,车体上配置有斗臂系统,所述斗臂系统包括伸缩臂(4)、用于控制伸缩臂(4)俯仰动作的俯仰油缸(2)以及用于控制伸缩臂(4)伸缩动作的伸缩油缸,伸缩臂(4)上固定连接有作业斗(5),其特征在于:所述斗臂系统还包括控制器和距离传感器(7),距离传感器(7)设置在作业斗(5)上且与控制器通讯连接,俯仰油缸(2)和/或伸缩油缸与控制器通讯连接,控制器中存储有控制程序以根据距离传感器检测的数值控制对应油缸伸缩进而实现作业斗在上下方向上直线移动。
7.根据权利要求6所述的伸缩臂式绝缘斗臂车,其特征在于:距离传感器(7)设置在作业斗(5)的外侧面上。
8.根据权利要求7所述的伸缩臂式绝缘斗臂车,其特征在于:作业斗(5)为矩形斗,所述伸缩臂(4)连接在作业斗(5)的其中一个侧面上,作业斗(5)的另外三个外侧面上均设有所述距离传感器(7)。
9.根据权利要求6-8任意一项所述的伸缩臂式绝缘斗臂车,其特征在于:距离传感器(7)与控制器之间为无线通讯,作业斗(5)上设有用于给距离传感器(7)供电的电源。
10.根据权利要求6-8任意一项所述的伸缩臂式绝缘斗臂车,其特征在于:距离传感器(7)与控制器之间通过导线实现通讯连接和供电。
技术总结
本技术涉及一种斗臂车斗臂系统及伸缩臂式绝缘斗臂车。斗臂车斗臂系统包括伸缩臂、用于控制伸缩臂俯仰动作的俯仰油缸以及用于控制伸缩臂伸缩动作的伸缩油缸,伸缩臂上固定连接有作业斗,斗臂车斗臂系统还包括控制器和距离传感器,距离传感器设置在作业斗上且与控制器通讯连接,俯仰油缸和/或伸缩油缸与控制器通讯连接,控制器中存储有控制程序以根据距离传感器检测的数值控制对应油缸伸缩进而实现作业斗在上下方向上直线移动。本技术斗臂车斗臂系统与现有技术相比,大大降低了调节难度,提高了工作效率,而且安全性更高。
技术研发人员:郭红起,黄晔矿,张志彬,夏天元,田敬中,张亮,杨乃新
受保护的技术使用者:许继时代技术有限公司
技术研发日:20221122
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!