一种货物自动装卸装置的制作方法
本技术涉及货物装卸的,具体涉及一种货物自动装卸装置。
背景技术:
1、箱类货物的运输主要是通过厢式货车和集装箱货车,因此如何将货物快速地搬运至货车内成了影响物流效率的重要因素。
2、在传统装卸方式中,货物的搬运和装卸由人工完成,但是人工搬运成本高、效率低,且货物易受损或丢失的问题常常发生。尤其是考虑到货物堆积时,码垛的货物往往较高,不仅加大了人工的劳动强度,而且会对工作环境造成安全隐患。
技术实现思路
1、本实用新型的目的是解决现有技术中由人工对箱类货物进行搬运和装卸时,由于劳动强度较大,不仅成本高、效率低,且货物易受损或丢失的技术问题。
2、为解决上述问题,本实用新型提供一种货物自动装卸装置,包括基架、取料器和托料器,所述基架上设有转运驱动件,所述转运驱动件用于带动所述取料器在至少两个位置间往复移动,所述取料器包括设有取料件的取料侧,所述取料件用于拿取待运物,所述托料器包括连接于所述取料器的托料动力源和位于取料侧下方的托板,所述托料动力源用于驱动所述托板在所述取料侧的下方伸缩移动。
3、初始状态下,托板处于未凸出于取料侧的缩回状态,当需要转运货物时,首先通过转运驱动件将取料器的取料侧移动至朝向待运物的位置,随后取料件拿起待运物,然后托料动力源驱动托板移动至凸出于取料侧的伸出状态,此时托板即可对被拿起的待运物进行支撑,随后转运驱动件将被拿起的待运物转移至所需位置,然后托料动力源驱动托板复位至缩回状态,取料件松开待运物即可完成转运。与现有技术相比,上述方案分别通过取料器和托料器实现了对待运物的拿取和支撑,有效避免了转运过程中箱类货物掉落受损的相关问题,运行稳定可靠,具备较好的实用性。
4、作为优选的,所述转运驱动件包括竖向转运件,所述竖向转运件用于带动所述取料器的升降,从而使得取料器能移动至不同高度的位置。
5、作为优选的,所述竖向转运件包括主立架、次立架和升降动力源,所述次立架沿竖向滑动连接于所述主立架,所述取料器沿竖向滑动连接于所述次立架,所述升降动力源为两个且分别用于驱动所述次立架和取料器的升降,从而一方面使得取料器具备更大的升降行程,另一方面当次立架滑动至与主立架叠合时占用的空间小。
6、作为优选的,所述主立架的两侧分别设有第一导轨,所述次立架包括支撑板、左立柱和右立柱,所述左立柱和右立柱均沿竖向设置且分别连接于支撑板的两端,所述左立柱和右立柱分别滑动连接于主立架两侧的第一导轨,所述左立柱和右立柱均设有供取料器滑动连接的第二导轨,从而保证次立架能够更为稳定地相对主立架滑动,整体的承载能力更好。
7、作为优选的,所述转运驱动件包括横向转运件,所述横向转运件用于带动取料器的平移和转动,从而实现更大的转运范围。
8、作为优选的,所述转运驱动件还包括转运臂、第一转运电机、伸缩架和伸缩动力源,所述伸缩架沿横向滑动连接至基架,所述伸缩动力源用于驱动所述伸缩架的平移,所述转运臂包括转动连接至所述伸缩架的第一端和供所述竖向转运件连接的第二端,所述第一转运电机用于驱动所述转运臂相对伸缩架的转动,转运臂的设置实现了竖向转运件上的取料器的转动,而伸缩架的设置实现了竖向转运件上的取料器的平移。
9、作为优选的,所述转运驱动件还包括第二转运电机,所述转运臂的第二端与竖向转运件之间为转动连接,所述第二转运电机用于驱动所述竖向转运件相对转运臂的转动,从而使得转运臂具备更好的自由度。
10、作为优选的,所述取料件包括若干个吸盘组,且所述吸盘组均沿横向设置,从而能够更方便快捷地实现对箱类待运物的拿取。
11、作为优选的,所述取料器上还设有取料动力源,所述取料动力源与所述托料动力源同向设置,所述取料件用于驱动所述取料件相对所述托板同向移动,从而更好地满足对不同尺寸的箱类待运物的拿取。
12、作为优选的,所述基架的底部设有车轮,从而使得基架能够根据需要进行移动。
技术特征:
1.一种货物自动装卸装置,其特征在于,包括基架(1)、取料器(2)和托料器(3),所述基架(1)上设有转运驱动件(4),所述转运驱动件(4)用于带动所述取料器(2)在至少两个位置间往复移动,所述取料器(2)包括设有取料件(21)的取料侧,所述取料件(21)用于拿取待运物,所述托料器(3)包括连接于所述取料器(2)的托料动力源(32)和位于取料侧下方的托板(31),所述托料动力源(32)用于驱动所述托板(31)在所述取料侧的下方伸缩移动。
2.根据权利要求1所述的一种货物自动装卸装置,其特征在于,所述转运驱动件(4)包括竖向转运件(41),所述竖向转运件(41)用于带动所述取料器(2)的升降。
3.根据权利要求2所述的一种货物自动装卸装置,其特征在于,所述竖向转运件(41)包括主立架(411)、次立架(412)和升降动力源(413),所述次立架(412)沿竖向滑动连接于所述主立架(411),所述取料器(2)沿竖向滑动连接于所述次立架(412),所述升降动力源(413)为两个且分别用于驱动所述次立架(412)和取料器(2)的升降。
4.根据权利要求3所述的一种货物自动装卸装置,其特征在于,所述主立架(411)的两侧分别设有第一导轨(411a),所述次立架(412)包括支撑板(412a)、左立柱(412b)和右立柱(412c),所述左立柱(412b)和右立柱(412c)均沿竖向设置且分别连接于支撑板(412a)的两端,所述左立柱(412b)和右立柱(412c)分别滑动连接于主立架(411)两侧的第一导轨(411a),所述左立柱(412b)和右立柱(412c)均设有供取料器(2)滑动连接的第二导轨(412d)。
5.根据权利要求1-4任一所述的一种货物自动装卸装置,其特征在于,所述转运驱动件(4)包括横向转运件,所述横向转运件用于带动取料器(2)的平移和转动。
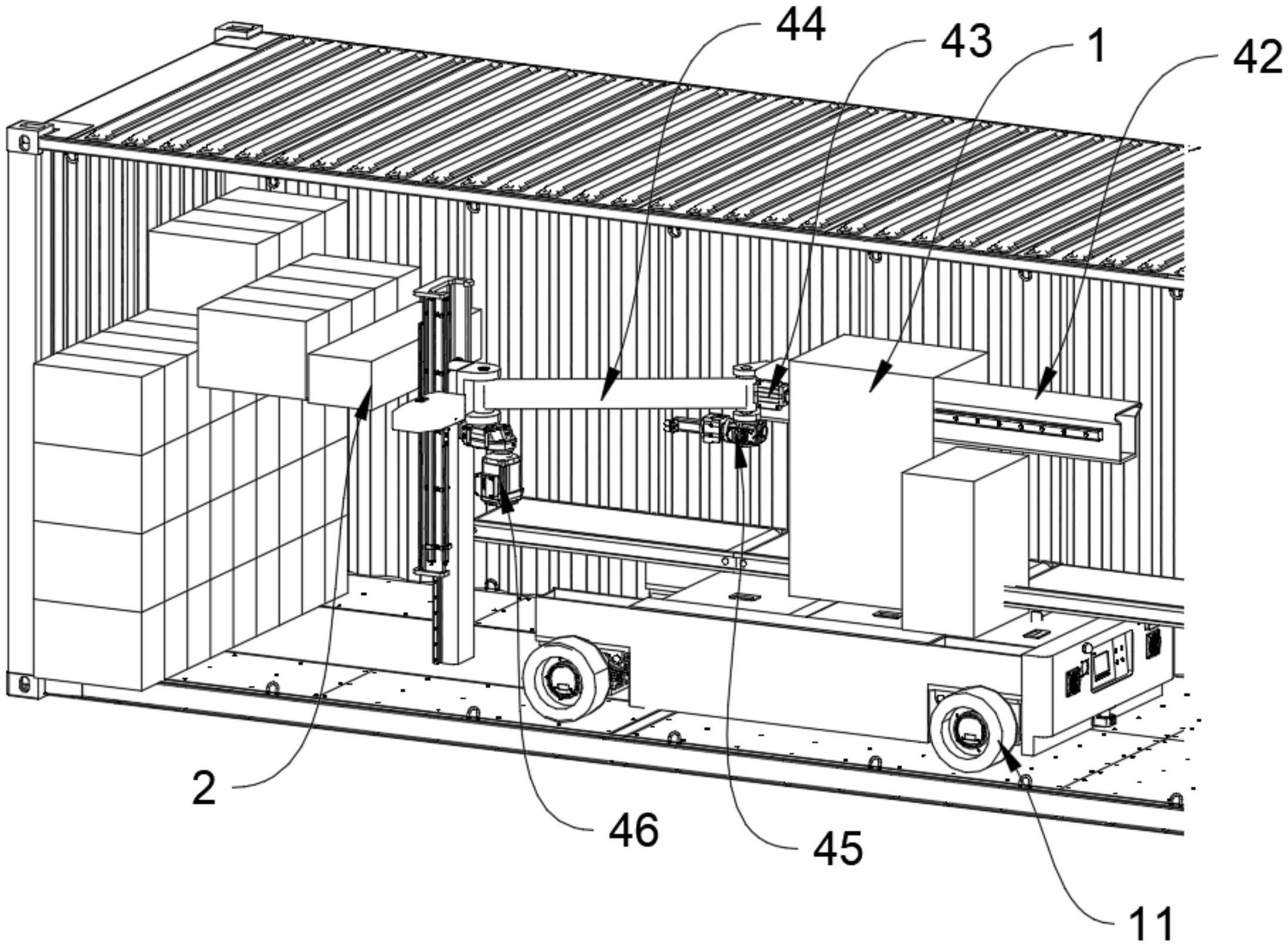
6.根据权利要求2-4任一所述的一种货物自动装卸装置,其特征在于,所述转运驱动件(4)还包括转运臂(44)、第一转运电机(45)、伸缩架(42)和伸缩动力源(43),所述伸缩架(42)沿横向滑动连接至基架(1),所述伸缩动力源(43)用于驱动所述伸缩架(42)的平移,所述转运臂(44)包括转动连接至所述伸缩架(42)的第一端和供所述竖向转运件(41)连接的第二端,所述第一转运电机(45)用于驱动所述转运臂(44)相对伸缩架(42)的转动。
7.根据权利要求6所述的一种货物自动装卸装置,其特征在于,所述转运驱动件(4)还包括第二转运电机(46),所述转运臂(44)的第二端与竖向转运件(41)之间为转动连接,所述第二转运电机(46)用于驱动所述竖向转运件(41)相对转运臂(44)的转动。
8.根据权利要求1所述的一种货物自动装卸装置,其特征在于,所述取料件(21)包括若干个吸盘组,且所述吸盘组均沿横向设置。
9.根据权利要求1或8所述的一种货物自动装卸装置,其特征在于,所述取料器(2)上还设有取料动力源(22),所述取料动力源(22)与所述托料动力源(32)同向设置,所述取料件(21)用于驱动所述取料件(21)相对所述托板(31)同向移动。
10.根据权利要求1所述的一种货物自动装卸装置,其特征在于,所述基架(1)的底部设有车轮(11)。
技术总结
一种货物自动装卸装置,包括基架、取料器和托料器,所述基架上设有转运驱动件,所述转运驱动件用于带动所述取料器在至少两个位置间往复移动,所述取料器包括设有取料件的取料侧,所述取料件用于拿取待运物,所述托料器包括连接于所述取料器的托料动力源和位于取料侧下方的托板,所述托料动力源用于驱动所述托板在所述取料侧的下方伸缩移动。与现有技术相比,上述方案分别通过取料器和托料器实现了对待运物的拿取和支撑,有效避免了转运过程中箱类货物掉落受损的相关问题,运行稳定可靠,具备较好的实用性。
技术研发人员:于洋,王浩吉,杨永帅
受保护的技术使用者:宁波新松机器人科技有限公司
技术研发日:20221128
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!