一种六边形碗面自动装箱机的制作方法
本技术涉及自动装箱机,特别是一种六边形碗面自动装箱机。
背景技术:
1、碗装方便食品即采用碗状容器进行盛载的食品类型,如碗面、自热米饭、方便小火锅等,这些食品虽然已经采用碗状容器进行盛载和包装,但通常都不适合于运输,故而还需要利用包装箱对这些碗装食品进行二次包装。而为了尽可能增加容量和降低包装成本,在同一个包装箱内除了需要多排多列地放置之外,通常还需要进行多层地放置。
2、同时,现有桶装或碗装方便面都是圆形为主,而本专利涉及一种六边形碗装方便面装箱机构。相较于传统的圆形碗面,六边形碗面外形不规则,需要在高速运行中旋转角度、并列排放后方可装入纸箱难度较大;并且由于六边形的不规则,用传统装箱机推面入箱的方式无法满足装箱速度,而且碗面在运行中容易由于六边形的尖角刺破碗面外包装膜造成次品。
技术实现思路
1、本实用新型的目的在于提供一种能够解决不规则多边形碗面的装箱方法,对六边形碗面进行高效装箱的自动装箱机,以解决上述背景技术中提出的问题。
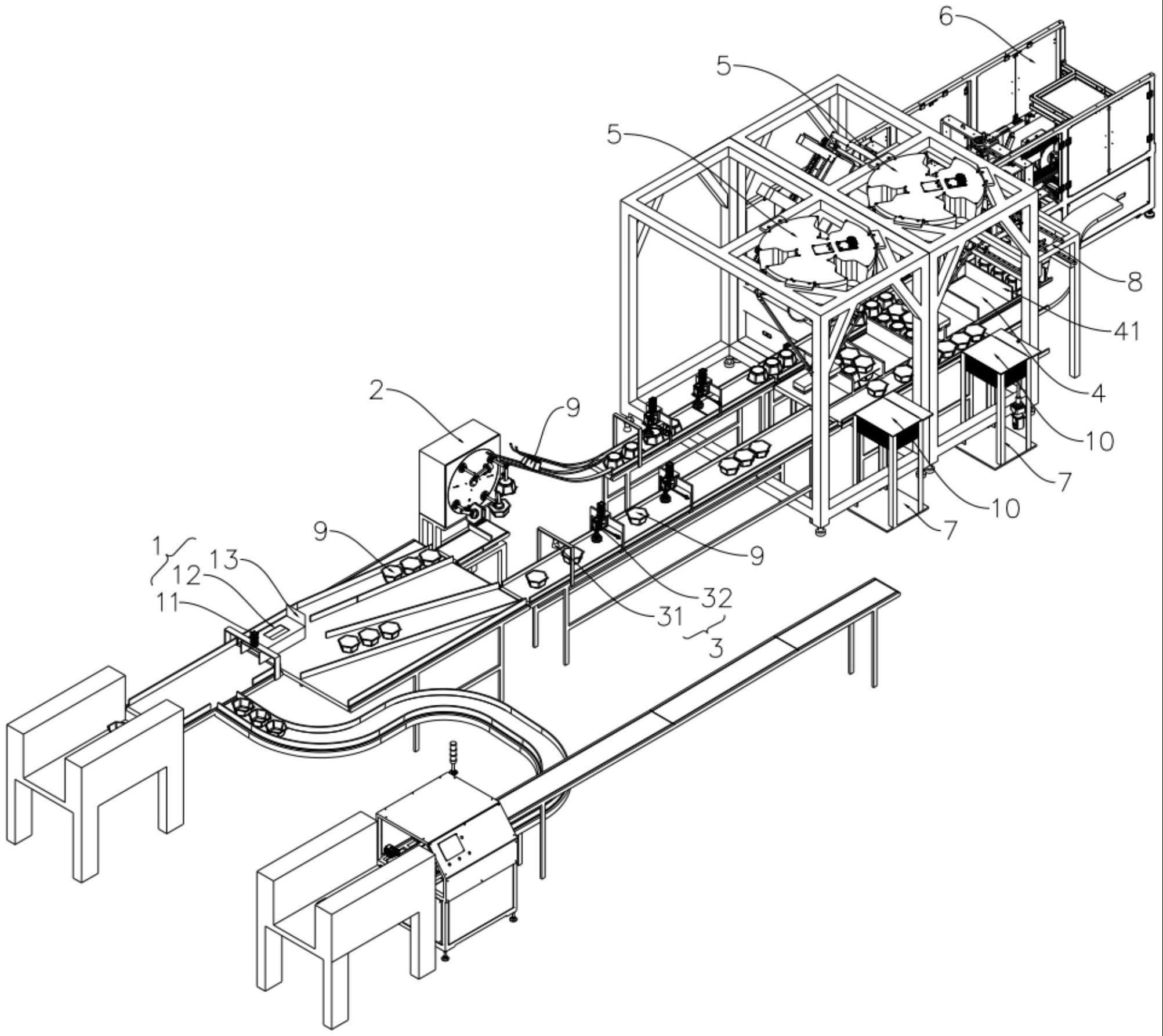
2、为实现上述目的,本实用新型提供如下技术方案:一种六边形碗面自动装箱机,包括,
3、分配机构,设置在所述自动装箱机输入端,用于将六边形碗面分配至第一送料通道和第二送料通道;
4、翻转机构,设置在所述第一送料通道的输出端,用于将位于所述第一送料通道内的六边形碗面翻面,所述翻转机构分别与所述第一送料通道和第一传送带连通;
5、两组对位机构,所述第二送料通道的输出端与第二传送带连接,所述对位机构分别设置在所述第一传送带和所述第二传送带上,所述对位机构包括一视觉检测仪和若干调节机构,所述调节机构用于根据所述视觉检测仪的信息旋转所述六边形碗面的角度;
6、摆盘传送带,与封箱机构连接;
7、至少两组抓取机构,可移动设置于所述第一传送带、所述第二传送带和所述摆盘传送带上方,用于将所述第一传送带和所述第二传送带上的六边形碗面抓取至所述摆盘传送带上摆放成型;
8、所述封箱机构,用于对摆放成型的所述六边形碗面封箱。
9、进一步的,还包括若干隔板供料机构,设置于所述第一传送带或所述第二传送带外侧,包括升降板和第一升降机构,隔板叠放至所述升降板上方,所述抓取机构用于抓取所述隔板并放置于所述摆盘传送带上的六边形碗面上。
10、进一步的,所述摆盘传送带设置于所述第一传送带和所述第二传送带之间,所述摆盘传送带上间隔设置有若干挡板,用于对所述六边形碗面限位。
11、进一步的,所述翻转机构包括在竖直面可转动设置的基板,若干可转动圆周均匀设置于所述基板上的取料机构,以及用于驱动所述基板和所述取料机构的驱动机构,所述驱动机构包括驱动电机、驱动轴、第一同步轮和至少两个第二同步轮,所述驱动电机与所述驱动轴传动连接,所述第一同步轮和所述基板同轴固接于所述驱动轴上,所述第二同步轮分别与所述取料机构固接,且所述第二同步轮与所述第一同步轮传动连接。
12、进一步的,所述驱动机构还包括转动安装于所述基板上的涨紧轮,所述第二同步轮两个为一组,两个所述第二同步轮之间设置有一所述涨紧轮,所述第一同步轮通过同步带同时与两个所述第二同步轮和一个所述涨紧轮连接形成取料传动单元,所述驱动结构包括至少两组传动单元。
13、进一步的,所述分配机构包括转动电机和分配通道,所述分配通道的输出端设置有一可开合盖板,所述第一送料通道和所述第二送料通道的输入端呈一夹角指向所述分配通道设置,所述转动电机用于控制所述分配通道的输出端与所述第一送料通道或所述第二送料通道的输入端连通。
14、进一步的,还包括一填充机构,可移动设置于所述摆盘传送带的输出端和所述封箱机构之间,包括填充机械手和连接所述摆盘传送带和所述封箱机的推动平台,所述填充机械手用于抓取所述摆盘传送带输出端上摆放成型的六边形碗面通过所述推动平台移动至所述封箱机构内。
15、与现有技术相比,本实用新型的有益效果是:
16、其一、设备紧凑,第一传送带、第二传送带以及摆盘传送带为并排设置,占地空间小,提高空间利用率;
17、其二、适用多种装箱类型,切换快速,可装6碗/箱,12碗/箱,以此类推,只需要在控制系统内更改机械手抓取数量以及抓取模式即可快速实现切换;
18、其三、设置有翻转机构,仅通过一个驱动机构实现同时对多个碗面在转运过程中完成翻转操作,提高效率,且结构简单,便于维护;
19、其四、所有机构均在同时运作且互不干涉,速度快,最高速度可达380桶/分钟,同时可接入多条碗面生产流水线,工作效率高;
20、其五、设备流程合理,过程运行稳定可靠。通过在摆盘堆叠前的先进行分股,并对其中一股进行翻面,使摆盘时可以两组抓取机构同时工作分别夹取两侧碗面进行摆放;同时设置对位机构在抓取机构工作前调整碗面摆放位置,使抓取机构可以直接抓取摆放,提高效率。
21、本方案采用行星轮结构的翻转机构解决碗面的高速翻转问题,同时采用视觉配合角度调节机构解决六边形角度旋转和边对边的问题,采用并联设置的抓取机构抓取入箱取代传统推面入箱,解决装箱时刺破碗面外包膜或者磨破外包膜,相较于传统装箱机,更加适配于非标准形碗结构,效率更高,成品率更高,包装效果更好。
技术特征:
1.一种六边形碗面自动装箱机,其特征在于,包括,
2.根据权利要求1所述的一种六边形碗面自动装箱机,其特征在于,还包括若干隔板供料机构(7),设置于所述第一传送带或所述第二传送带外侧,包括升降板(71)和用于驱动所述升降板(71)的第一升降机构(72),隔板(10)叠放至所述升降板(71)上方,所述抓取机构(5)用于抓取所述隔板(10)并放置于所述摆盘传送带(4)上的六边形碗面(9)上。
3.根据权利要求1所述的一种六边形碗面自动装箱机,其特征在于,所述摆盘传送带(4)设置于所述第一传送带和所述第二传送带之间,所述摆盘传送带(4)上间隔设置有若干挡板(41),用于对所述六边形碗面(9)限位。
4.根据权利要求1所述的一种六边形碗面自动装箱机,其特征在于,所述翻转机构(2)包括在竖直面可转动设置的基板(21),若干可转动圆周均匀设置于所述基板(21)上的取料机构(22),以及用于驱动所述基板(21)和所述取料机构(22)的驱动机构(23),所述驱动机构(23)包括驱动电机(231)、驱动轴(232)、第一同步轮(233)和至少两个第二同步轮(234),所述驱动电机(231)与所述驱动轴(232)传动连接,所述第一同步轮(233)和所述基板(21)同轴固接于所述驱动轴(232)上,所述第二同步轮(234)分别与所述取料机构(22)固接,且所述第二同步轮(234)与所述第一同步轮(233)传动连接。
5.根据权利要求4所述的一种六边形碗面自动装箱机,其特征在于,所述驱动机构(23)还包括转动安装于所述基板(21)上的涨紧轮(235),所述第二同步轮(234)两个为一组,两个所述第二同步轮(234)之间设置有一所述涨紧轮(235),所述第一同步轮(233)通过同步带(236)同时与两个所述第二同步轮(234)和一个所述涨紧轮(235)连接形成取料传动单元,所述驱动机构(23)包括至少两组传动单元。
6.根据权利要求1所述的一种六边形碗面自动装箱机,其特征在于,所述分配机构(1)包括转动电机(11)和分配通道(12),所述分配通道(12)的输出端可开合设置有一盖板(13),所述第一送料通道和所述第二送料通道的输入端呈一夹角指向所述分配通道(12)设置,所述转动电机(11)用于控制所述分配通道(12)的输出端与所述第一送料通道或所述第二送料通道的输入端连通。
7.根据权利要求1所述的一种六边形碗面自动装箱机,其特征在于,还包括一填充机构(8),可移动设置于所述摆盘传送带(4)的输出端和所述封箱机构(6)之间,包括填充机械手(81)和连接所述摆盘传送带(4)和所述封箱机的推动平台(82),所述填充机械手(81)用于抓取所述摆盘传送带(4)输出端上摆放成型的六边形碗面(9)通过所述推动平台(82)移动至所述封箱机构(6)内。
技术总结
本技术涉及自动装箱机技术领域,特别是一种六边形碗面自动装箱机,包括分配机构、翻转机构、两组对位机构、摆盘传送带、两组抓取机构以及封箱机构。所述分配机构设置在所述自动装箱机输入端,用于将六边形碗面分配至第一送料通道和第二送料通道。所述翻转机构设置在所述第一送料通道的输出端,用于将位于所述第一送料通道内的六边形碗面翻面。两组对位机构用于旋转所述六边形碗面的角度使相邻碗面之间邻边齐平。抓取机构用于将所述第一传送带和所述第二传送带上的六边形碗面抓取至所述摆盘传送带上摆放成型。所述摆盘传送带与封箱机构连接,所述封箱机构用于对摆放成型的所述六边形碗面封箱。
技术研发人员:吴银山,陈婷
受保护的技术使用者:厦门初显技术有限公司
技术研发日:20221129
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!