一种仓储机器人
本技术属于仓储机器人领域,尤其涉及一种仓储机器人。
背景技术:
1、我国国家标准将agv定义为装有自动导引装置,能按照预先规定的路径行驶,具有编程,停车选择,安全保护及各种移载功能的搬运小车。一款典型的agv由车体、电池与充电装置、驱动装置、转向装置、控制装置组成。
2、自主移动机器人(amr,autonomous mobile robot )定义为开箱即用的移动机器人,是指能够在有障碍的工作空间内自主感知,自主决策,自主运动,无需对工作环境加装外部辅助基础设施。
3、amr智能机器人是针对传统机器人进行更新升级的产品,相较于传统的智能机器人,amr智能机器人的智能化程度更高,环境适应性更强,人机交互与协作程度更高并且提升生产绩效的优势也比传统机器人更为明显。
4、amr智能机器人有六个功能,其中最主要的功能是协同联动搬运功能,智能程度高,能够灵活变动,可以根据货物重量的不同,自行调动附近的小车进行多台协同联动搬运。另外amr智能机器人还包含货物自动跟踪、路径规划、作业状态监控等功能,实现车体无人化运行,以此来作为调度系统的先决条件。
5、导航技术,指解决如何让机器人从当前位置移动到目标地点的技术,通常解决导航问题的前提是解决定位问题。“定位技术”解决的是让机器人知道自己当前在哪里,“导航技术”解决的是让机器人知道如何到达目标地点。
6、而目前市面上已有的搬运机器人有以下缺点:搬运速度与效率难以满足现代物流高速高效的需求;面对较复杂地形或行驶路线中有障碍物时搬运路径规划不够智能,难以正常完成工作;传统任务分配存在着处理出来的任务陷入局部最优,进行全局最优算法又耗费大量的时间,并为cpu的增加大量计算负荷,性价比不高。
技术实现思路
1、本实用新型的目的在于提供一种仓储机器人,旨在解决现有技术中搬运机器人搬运速度与效率难以满足现代物流高速高效的需求;面对较复杂地形或行驶路线中有障碍物时搬运路径规划不够智能,难以正常完成工作;传统任务分配存在着处理出来的任务陷入局部最优,进行全局最优算法又耗费大量的时间,并为cpu的增加大量计算负荷,性价比不高的技术问题。
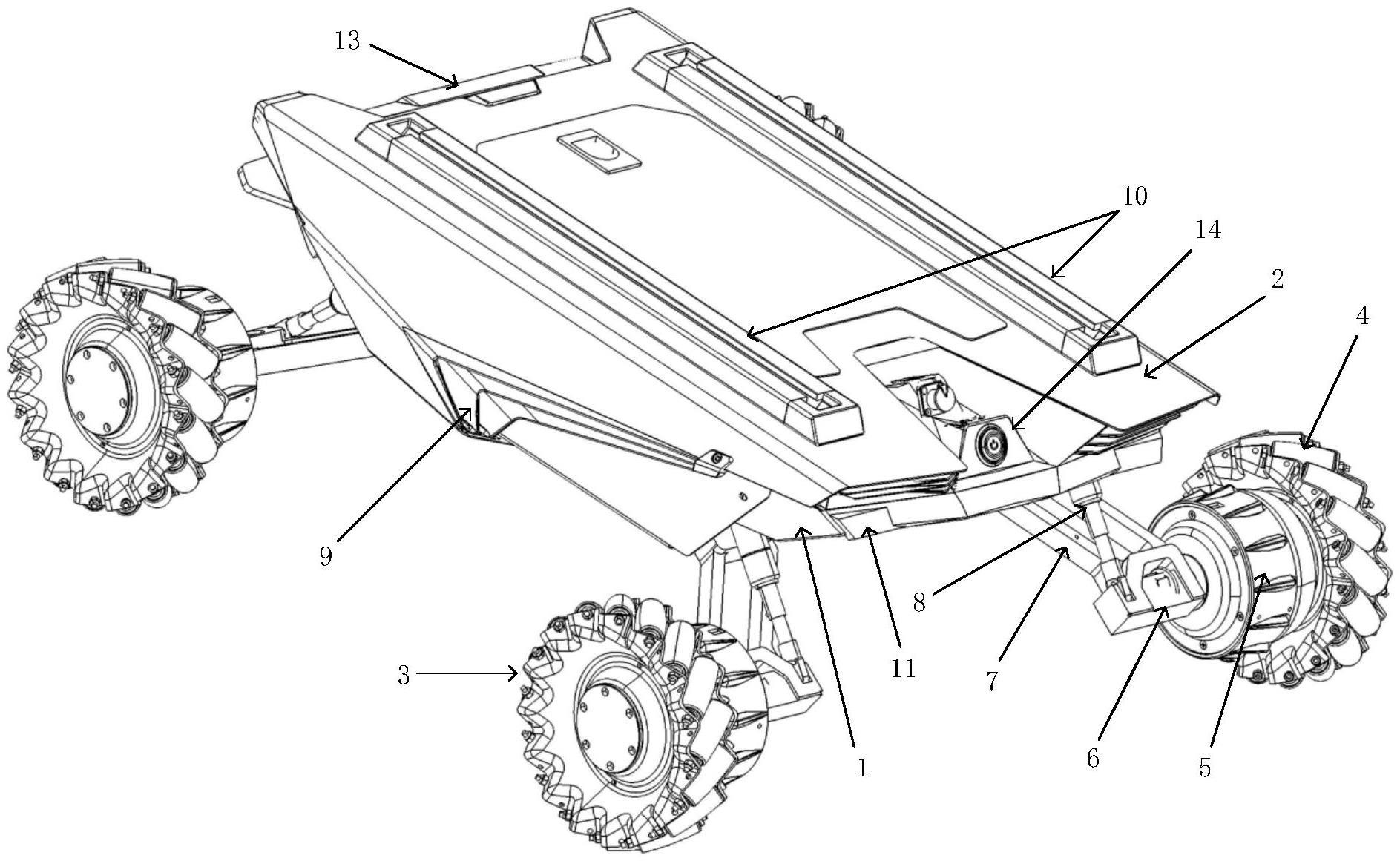
2、本实用新型是这样实现的,一种仓储机器人,所述仓储机器人包括内部设置有电池与控制单元的底盘,盖覆在所述底盘上的上外壳,及设置在所述底盘四周组成车结构且与所述底盘连接的轮驱动单元;所述轮驱动单元包括车轮,设置在所述车轮上的轮毂电机,设置在所述轮毂电机上的摇臂,设置在所述摇臂上且铰链连接所述底盘的摇臂连接板,及设置在所述摇臂尾端且连接所述底盘的弹簧悬挂。
3、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述上外壳两侧的外壳。
4、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述上外壳顶部两侧的固定型材。
5、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述底盘与所述上外壳上的后外壳。
6、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述底盘上的保险杠。
7、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述底盘与所述上外壳上的前外壳。
8、本实用新型的进一步技术方案是:所述仓储机器人还包括设置在所述底盘上用于完成区域地图构建及路径规划的高传感与数据处理模块。
9、本实用新型的进一步技术方案是:所述高传感与数据处理模块包括用于获取周围长距与短距距离数据的长距激光雷达及短距激光雷达,连接所述长距激光雷达及所述短距激光雷达用于完成区域地图构建的工控计算机,及连接所述工控计算机用于采集周围障碍物的深感摄像头。
10、本实用新型的有益效果是:此种仓储机器人利用四轮差速驱动的方式替代了传统的阿克曼驱动法方式,提高了机器人的运动速度,减少了转向半径并增大了使用寿命;利用轮毂电机减小了内部的空间占用,因此可以容纳大容量电池;利用独立悬架结构,提高了运动系统稳定性,降低车体振动,利用多传感器获取位置、距离数据,经过数据处理后得到仿真地图,实现高效的路径规划,在面对复杂地形时,利用高效的独立悬挂系统减少本体振动,防止货物的损坏与掉落,在面对障碍物时,利用激光雷达与深度摄像头组合分析,有效识别障碍物,利用差速轮的0转向半径特点高效避开,针对传统任务分类的局限性,提出了任务的并行处理方案,结合贪婪算法与混合粒子群算法,有效的提高工作效率。
技术特征:
1.一种仓储机器人,其特征在于:所述仓储机器人包括内部设置有电池与控制单元的底盘,盖覆在所述底盘上的上外壳,及设置在所述底盘四周组成车结构且与所述底盘连接的轮驱动单元;所述轮驱动单元包括车轮,设置在所述车轮上的轮毂电机,设置在所述轮毂电机上的摇臂,设置在所述摇臂上且铰链连接所述底盘的摇臂连接板,及设置在所述摇臂尾端且连接所述底盘的弹簧悬挂。
2.根据权利要求1所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述上外壳两侧的外壳。
3.根据权利要求2所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述上外壳顶部两侧的固定型材。
4.根据权利要求3所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述底盘与所述上外壳上的后外壳。
5.根据权利要求4所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述底盘上的保险杠。
6.根据权利要求5所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述底盘与所述上外壳上的前外壳。
7.根据权利要求1-6任一项所述的仓储机器人,其特征在于,所述仓储机器人还包括设置在所述底盘上用于完成区域地图构建及路径规划的高传感与数据处理模块。
8.根据权利要求7所述的仓储机器人,其特征在于,所述高传感与数据处理模块包括用于获取周围长距与短距距离数据的长距激光雷达及短距激光雷达,连接所述长距激光雷达及所述短距激光雷达用于完成区域地图构建的工控计算机,及连接所述工控计算机用于采集周围障碍物的深感摄像头。
技术总结
本技术适用于仓储机器人领域,提供了一种仓储机器人,所述仓储机器人包括内部设置有电池与控制单元的底盘,盖覆在所述底盘上的上外壳,及设置在所述底盘四周组成车结构且与所述底盘连接的轮驱动单元。旨在解决现有技术中搬运机器人搬运速度与效率难以满足现代物流高速高效的需求;面对较复杂地形或行驶路线中有障碍物时搬运路径规划不够智能,难以正常完成工作;传统任务分配存在着处理出来的任务陷入局部最优,进行全局最优算法又耗费大量的时间,并为CPU的增加大量计算负荷,性价比不高的技术问题。
技术研发人员:白建军,邰警锋
受保护的技术使用者:深圳技师学院(深圳高级技工学校)
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!