一种稳定性好的倒装设备的制作方法
本技术属于o型圈,尤其涉及一种稳定性好的倒装设备。
背景技术:
1、o型圈适用于装在各种机械设备上,在规定的温度、压力、以及不同的液体和气体介质中,于静止或运动状态下起密封作用。在机床、船舶、汽车、航空航天设备、冶金机械、化工机械、工程机械、建筑机械、矿山机械、石油机械、塑料机械、农业机械、以及各类仪器仪表上,大量应用着各种类型的密封元件。o型密封圈主要用于静密封和往复运动密封。用于旋转运动密封时,仅限于低速回转密封装置,o型密封圈一般安装在外圆或内圆上截面为矩形的沟槽内起密封作用,o型密封圈在耐油、酸碱、磨、化学侵蚀等环境依然起到良好密封、减震作用,因此,o型密封圈是液压与气压传动系统中使用最广泛的一种密封件。
2、在o型圈进行加工时,需要通过机械手进行抓取,但是在进行抓取时,不能实现循环上料,需要等待其中一个料盘取料完毕后,才能进行装料,影响加工效率,需要进行改进。
3、因此,亟需设计一种稳定性好的倒装设备以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种稳定性好的倒装设备,为实现上述目的,本实用新型提供如下技术方案:
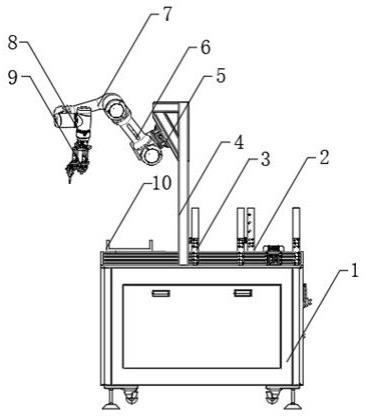
2、一种稳定性好的倒装设备,包括支撑底架、第一托盘位、第二托盘位、抓手架、倒装座、机械抓手和料盘,所述支撑底架的顶端一侧设置有第一托盘位,所述第一托盘位的一侧设置有第二托盘位,所述第二托盘位的一侧固定连接有抓手架,所述抓手架的顶部固定安装有机械抓手,所述机械抓手由旋转架、第一机械臂、第二机械臂、第三机械臂和倒装座组成,所述第一机械臂活动设置在旋转架的一侧,且所述旋转架的一端与抓手架固定连接,所述第一机械臂的一端活动连接有第二机械臂。
3、进一步的,所述第二机械臂的一端活动连接有第三机械臂,所述第三机械臂的一端固定连接有倒装座。
4、进一步的,所述支撑底架的顶端中部固定安装有导向滑轨,所述导向滑轨的底部滑动安装有托盘本体。
5、进一步的,所述托盘本体的顶部设置有料盘,所述支撑底架的顶端边侧活动设置有升降推板。
6、进一步的,所述升降推板设置在第一托盘位和第二托盘位内部,且所述升降推板的底端与设置在支撑底架内部的升降电机输出端固定连接。
7、本实用新型的有益效果是:
8、支撑底架顶部设置有第一托盘位和第二托盘位,且可通过托盘本体带动料盘滑动,加工时,托盘本体从第一托盘位取料,然后滑动至机械抓手的底部,通过机械抓手进行抓取加工,料盘取料完毕后,托盘本体再次带动取料后的料盘滑动至第二托盘位,通过升降推板推动空的料盘上升,即可形成一个空的料盘码垛区,从第二托盘位取下空料盘,即可再次进行装料,实现循环加工。
技术特征:
1.一种稳定性好的倒装设备,其特征在于,包括支撑底架(1)、第一托盘位(2)、第二托盘位(3)、抓手架(4)、倒装座(9)、机械抓手(11)和料盘(13),所述支撑底架(1)的顶端一侧设置有第一托盘位(2),所述第一托盘位(2)的一侧设置有第二托盘位(3),所述第二托盘位(3)的一侧固定连接有抓手架(4),所述抓手架(4)的顶部固定安装有机械抓手(11),所述机械抓手(11)由旋转架(5)、第一机械臂(6)、第二机械臂(7)、第三机械臂(8)和倒装座(9)组成,所述第一机械臂(6)活动设置在旋转架(5)的一侧,且所述旋转架(5)的一端与抓手架(4)固定连接,所述第一机械臂(6)的一端活动连接有第二机械臂(7)。
2.根据权利要求1所述的一种稳定性好的倒装设备,其特征在于,所述第二机械臂(7)的一端活动连接有第三机械臂(8),所述第三机械臂(8)的一端固定连接有倒装座(9)。
3.根据权利要求1所述的一种稳定性好的倒装设备,其特征在于,所述支撑底架(1)的顶端中部固定安装有导向滑轨,所述导向滑轨的底部滑动安装有托盘本体(10)。
4.根据权利要求3所述的一种稳定性好的倒装设备,其特征在于,所述托盘本体(10)的顶部设置有料盘(13),所述支撑底架(1)的顶端边侧活动设置有升降推板(12)。
5.根据权利要求4所述的一种稳定性好的倒装设备,其特征在于,所述升降推板(12)设置在第一托盘位(2)和第二托盘位(3)内部,且所述升降推板(12)的底端与设置在支撑底架(1)内部的升降电机输出端固定连接。
技术总结
本技术公开了一种稳定性好的倒装设备,包括支撑底架,抓手架的顶部固定安装有机械抓手,机械抓手由旋转架、第一机械臂、第二机械臂、第三机械臂和倒装座组成,第一机械臂活动设置在旋转架的一侧,旋转架的一端与抓手架固定连接,第一机械臂的一端活动连接有第二机械臂;本技术支撑底架顶部设置有第一托盘位和第二托盘位,且可通过托盘本体带动料盘滑动,加工时,托盘本体从第一托盘位取料,然后滑动至机械抓手的底部,通过机械抓手进行抓取加工,料盘取料完毕后,托盘本体再次带动取料后的料盘滑动至第二托盘位,通过升降推板推动空的料盘上升,即可形成一个空的料盘码垛区,从第二托盘位取下空料盘,即可再次进行装料,实现循环加工。
技术研发人员:胡俊潭,陈林,周胜仁
受保护的技术使用者:宁波知日智能设备有限公司
技术研发日:20221208
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!