装卸车系统的制作方法
本技术属于物流自动搬运,具体涉及一种装卸车系统。
背景技术:
1、专利一种3d立体视觉辅助装卸车系统(公告号cn106395430a),该系统采用伸缩输送机、伸缩叉和装卸机器人结构,伸缩叉将装卸机器人送入车厢内装卸货物,伸缩输送机伸入车厢内在装卸机器人侧面运送货物,该系统装卸机器人由伸缩叉托举送入车厢,由于车厢长度较大且机器人重量较大,伸缩叉的结构较为复杂,另外该系统伸缩输送机与机器人并排布置,占用车厢宽度较大,机器人与输送机的尺寸受到限制。
2、专利一种柔性自动装卸车机器人系统(公告号cn114572719a),该系统包括装卸机器人和柔性伸缩输送设备,需要在装卸机器人上安装走行驱动系统,依靠机器人拖动柔性伸缩输送设备,装卸机器人的运行与结构复杂,另外该系统用在装卸车时,进出车厢困难,需要吊装或搭桥。
技术实现思路
1、本实用新型的目的在于提供一种装卸车系统,便于实现装卸机器人进出车厢。
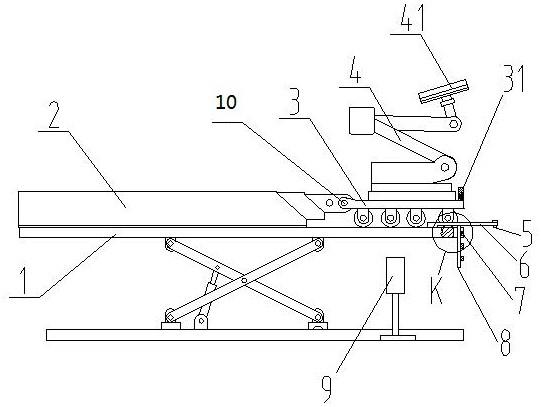
2、本实用新型一种装卸车系统包括:升降台、伸缩输送机、小车、装卸机器人,所述伸缩输送机的前端与小车的后端通过转轴连接,小车可绕转轴上下转动,所述伸缩输送机的底座固定安装在升降台上,所述小车的滚轮支撑在升降台上,所述小车的前端安装有测距传感器,所述装卸机器人安装在小车上,装卸机器人包括夹爪或吸盘、视觉传感器以及至少5个自由度的机械臂,用于抓取车厢内的货物将货物装在伸缩输送机上或抓取伸缩输送机上的货物将货物装在车箱内。
3、进一步的,所述小车有四对共8个滚轮,四对滚轮设置方便小车跨越升降平台与车厢之间的间隙,车厢不需要贴近升降台,小车也可以平稳进出车厢。
4、进一步的,所述升降台上安装有升降台与车厢底面等高判断装置,升降台升降到与车厢底面等高时,伸缩输送机可将小车推送到车厢内部。
5、进一步的,所述升降台前端安装有超声波测距装置,所述升降台外侧架设有显示屏,显示屏用于显示超声波测距装置的测量值,通过超声波测距装置测量车厢后端与升降台前端之间的距离,方便货车停靠到位与停车安全。
6、本实用新型装卸车系统是这样工作的,货车倒车到靠近升降台的前端准备装卸货,调整升降台高度货车车厢底板大致等高,伸缩输送机向前伸缩展并推动小车及小车上的装卸机器人向车厢运动,通过小车上的测距传感器测量前端货物或车厢端头的位置,装卸机器人通过视觉传感器识别货物并控制机械臂与夹爪或吸盘的运动抓取货物伸缩输送机上的货物装载到车厢内实现装车或抓取车厢内的货物装载到伸缩输送机上实现卸车,装卸车完成后,伸缩输送机回缩,拖动机器人回到升降平台。
7、本实用新型装卸车系统,包括升降台、伸缩输送机、小车、装卸机器人,装卸机器人安装在小车上,通过伸缩输送机推动小车及小车上的装卸机器人进出车厢,装卸机器人抓取伸缩输送机上的货物装载到车厢内实现装车,或是抓取车厢内的货物装载到伸缩输送机上实现卸车,系统结构简单,运动安全可靠,与车厢对接方便快捷,装卸效率高,适用不同高度与长度的车辆装卸车。
技术特征:
1.装卸车系统,其特征在于:包括升降台、伸缩输送机、小车、装卸机器人,所述伸缩输送机的前端与小车的后端通过转轴连接,小车可绕转轴上下转动,所述伸缩输送机的底座固定安装在升降台上,所述小车的滚轮支撑在升降台上,所述小车的前端安装有测距传感器,所述装卸机器人安装在小车上,装卸机器人包括夹爪或吸盘、视觉传感器以及至少5个自由度的机械臂,用于抓取车厢内的货物将货物装在伸缩输送机上或抓取伸缩输送机上的货物将货物装在车箱内。
2.根据权利要求1所述的装卸车系统,其特征在于:所述小车有四对共8个滚轮。
3.根据权利要求1或2所述的装卸车系统,其特征在于:所述升降台上安装有升降台与车厢底面等高判断装置。
4.根据权利要求3所述的装卸车系统,其特征在于:所述升降台(1)上安装有升降台与车厢底面等高判断装置是伸出升降台前端的横支架(6)和安装在横支架(6)上的接近开关(5),升降台(1)向下运动至与车厢(11)底面等高时,接近开关(5)触碰到车厢(11)底面并动作。
5.根据权利要求4所述的装卸车系统,其特征在于:所述升降台前端安装有超声波测距装置,所述升降台外侧架设有显示屏,显示屏用于显示超声波测距装置的测量值,超声波测距装置测量车厢后端与升降台前端之间的距离。
6.根据权利要求5所述的装卸车系统,其特征在于:所述横支架(6)的下部安装有竖支架(8),所述超声波测距装置安装在竖支架(8)上。
7.根据权利要求6所述的装卸车系统,其特征在于:还包括电控系统,所述电控系统与升降台(1)、伸缩输送机(2)、装卸机器人(4)、测距传感器(31)、接近开关(5)电连接,用于控制升降台升降运动并在接近开关(5)动作时停止升降运动,控制伸缩输送机(2)伸缩运动并在测距传感器(31)测量到装卸货位置时停止运动,给装卸机器人(4)发送装卸作业任务并接收装卸机器人(4)的作业信息。
技术总结
本技术涉及一种装卸车系统,属于物流自动搬运技术领域,包括升降台、伸缩输送机、小车、装卸机器人,装卸机器人安装在小车上,通过伸缩输送机推动小车及小车上的装卸机器人进出车厢,装卸机器人抓取伸缩输送机上的货物装载到车厢内实现装车,或是抓取车厢内的货物装载到伸缩输送机上实现卸车,系统结构简单,运动安全可靠,与车厢对接方便快捷,装卸效率高,适用不同高度与长度的车辆装卸车。
技术研发人员:李科,陆晓东,商福春,李政,杨子进
受保护的技术使用者:昆明万锐鹍鹏机电工程技术有限公司
技术研发日:20221209
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!