搬运机器人的制作方法
本申请涉及物流运输,尤其涉及一种搬运机器人。
背景技术:
1、在物料仓储及运输过程中常常用到搬运机器人,现有搬运机器人具有举升装置,该举升装置通常集成到一整块平板上,不可拆卸,导致举升装置整体体积较大,结构复杂,拆装和维护困难。
技术实现思路
1、本申请的目的在于提供一种搬运机器人,以解决上述现有搬运机器人中的举升装置体积较大、结构复杂,且拆装和维护困难的问题。
2、本申请提供了一种搬运机器人,其中,包括:
3、底盘组件;
4、举升组件,包括底座机构和升降机构,所述升降机构连接于所述底座机构;
5、其中,所述底座机构包括多个分散布置的底座,所述底座通过连接件可拆卸地连接于所述底盘组件。
6、在一种可能的设计中,所述连接件包括螺帽和螺柱,所述螺柱的一端与所述螺帽固定连接,所述螺柱的另一端用于穿过所述底盘组件固定于所述底座,所述螺帽用于锁紧于所述底盘组件背离所述底座的一面。
7、在一种可能的设计中,所述底座机构还包括桥接臂,所述底座和所述升降机构均连接于所述桥接臂。
8、在一种可能的设计中,所述底座上固定设置有销轴,所述桥接臂上设置有安装孔,所述安装孔套接于所述销轴。
9、在一种可能的设计中,所述桥接臂对称设置有两个,每个所述桥接臂与至少两个所述底座连接。
10、在一种可能的设计中,所述升降机构包括驱动机构、连杆结构、滑动结构和托盘,所述托盘连接于所述连杆结构的顶部,所述连杆结构底部的一端与所述驱动机构连接,所述连杆结构底部的另一端通过所述滑动结构与所述桥接臂滑动连接。
11、在一种可能的设计中,所述桥接臂包括依次连接的第一平直段、拱起段和第二平直段,第一平直段与所述连杆结构铰接,所述第二平直段通过所述滑动结构与所述连杆结构滑动连接,所述拱起段挡接于所述连杆结构的一侧。
12、在一种可能的设计中,所述搬运机器人还包括电器件,所述底盘组件包括底盘,所述底盘设置有安装部位,所述电器件连接于所述安装部位。
13、在一种可能的设计中,所述底盘组件还包括行走轮组和驱动电机,所述驱动电机的输出轴与所述行走轮组连接,所述驱动电机安装于所述底盘;
14、所述桥接臂位于所述拱起段朝向所述底盘的一侧设置有容置空间,所述驱动电机设置于所述容置空间中。
15、在一种可能的设计中,所述底盘的边缘设置有翻边,所述翻边向所述举升组件的一侧延伸。
16、本申请提供的技术方案可以达到以下有益效果:
17、本申请提供的搬运机器人,通过设置独立且分散布置的底座,可以实现多点固定,保证对举升组件和底盘组件两者连接的可靠性,且底座的体积较小,能够节省空间,提升搬运机器人的结构紧凑型,同时也便于拆装,有利于对举升组件及底盘组件的维护。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种搬运机器人,其特征在于,包括:
2.根据权利要求1所述的搬运机器人,其特征在于,所述连接件(3)包括螺帽和螺柱,所述螺柱的一端与所述螺帽固定连接,所述螺柱的另一端用于穿过所述底盘组件(1)固定于所述底座(211),所述螺帽用于锁紧于所述底盘组件(1)背离所述底座(211)的一面。
3.根据权利要求1所述的搬运机器人,其特征在于,所述底座机构(21)还包括桥接臂(212),所述底座(211)和所述升降机构(22)均连接于所述桥接臂(212)。
4.根据权利要求3所述的搬运机器人,其特征在于,所述底座(211)上固定设置有销轴(211a),所述桥接臂(212)上设置有安装孔,所述安装孔套接于所述销轴(211a)。
5.根据权利要求4所述的搬运机器人,其特征在于,所述桥接臂(212)对称设置有两个,每个所述桥接臂(212)与至少两个所述底座(211)连接。
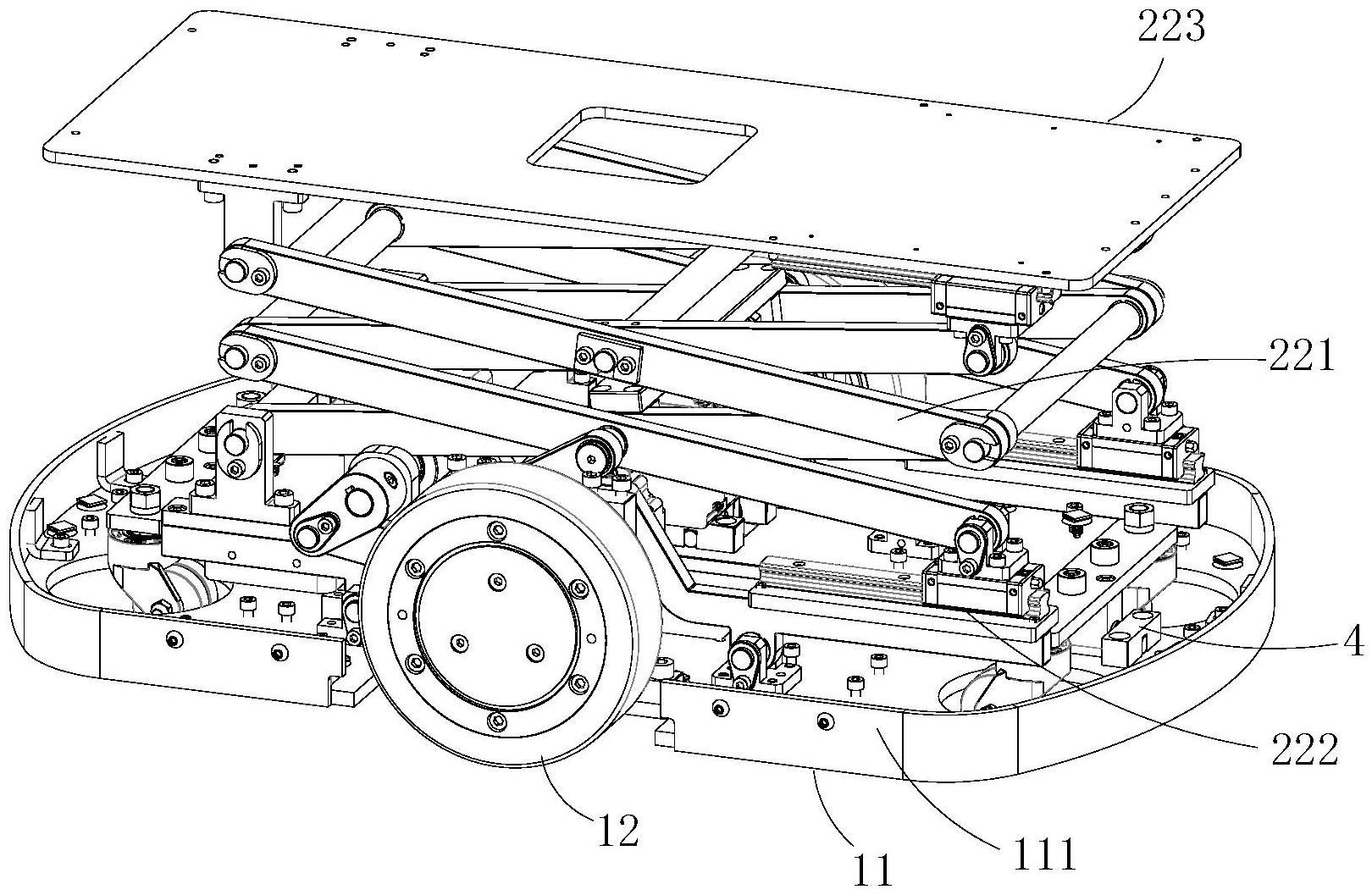
6.根据权利要求3所述的搬运机器人,其特征在于,所述升降机构(22)包括驱动机构(224)、连杆结构(221)、滑动结构(222)和托盘(223),所述托盘(223)连接于所述连杆结构(221)的顶部,所述连杆结构(221)底部的一端与所述驱动机构(224)连接,所述连杆结构(221)底部的另一端通过所述滑动结构(222)与所述桥接臂(212)滑动连接。
7.根据权利要求6所述的搬运机器人,其特征在于,所述桥接臂(212)包括依次连接的第一平直段(212a)、拱起段(212b)和第二平直段(212c),第一平直段(212a)与所述连杆结构(221)铰接,所述第二平直段(212c)通过所述滑动结构(222)与所述连杆结构(221)滑动连接,所述拱起段(212b)挡接于所述连杆结构(221)的一侧。
8.根据权利要求7所述的搬运机器人,其特征在于,所述搬运机器人还包括电器件(4),所述底盘组件(1)包括底盘(11),所述底盘(11)设置有安装部位,所述电器件(4)连接于所述安装部位。
9.根据权利要求8所述的搬运机器人,其特征在于,所述底盘组件(1)还包括行走轮组(12)和驱动电机(13),所述驱动电机(13)的输出轴与所述行走轮组(12)连接,所述驱动电机(13)安装于所述底盘(11);
10.根据权利要求8所述的搬运机器人,其特征在于,所述底盘(11)的边缘设置有翻边(111),所述翻边(111)向所述举升组件(2)的一侧延伸。
技术总结
本申请提供了一种搬运机器人,其包括底盘组件和举升组件,其中,该举升组件包括底座机构和升降机构,升降机构连接于底座机构;其中,底座机构包括多个分散布置的底座,底座通过连接件可拆卸地连接于底盘组件。本申请提供的搬运机器人,通过设置独立且分散布置的底座,可以实现多点固定,保证对举升组件和底盘组件两者连接的可靠性,且底座的体积较小,能够节省空间,提升搬运机器人的结构紧凑型,同时也便于拆装,有利于对举升组件及底盘组件的维护。
技术研发人员:林翰,欧阳鸿飞,谢彬,董建涛
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!