一种码垛机器人用的输送支撑轨道的制作方法
本技术涉及码垛机器人,尤其涉及一种码垛机器人用的输送支撑轨道。
背景技术:
1、码垛机器人用于对物料进行码垛,为了提高输送的效率,码垛机器人一般设置在传送带一侧,直接对传送带上的物料进行码垛,但是传送带一直处于移动输送的状态,码垛机器人的码垛时间有限,有些时候需要较长的码垛时间时,则需要降低传送带的输送速度,这样会降低输送的效率。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在移动的传送带导致码垛机器人的码垛时间有限的缺点,而提出的一种码垛机器人用的输送支撑轨道。
2、为了实现上述目的,本实用新型采用了如下技术方案:
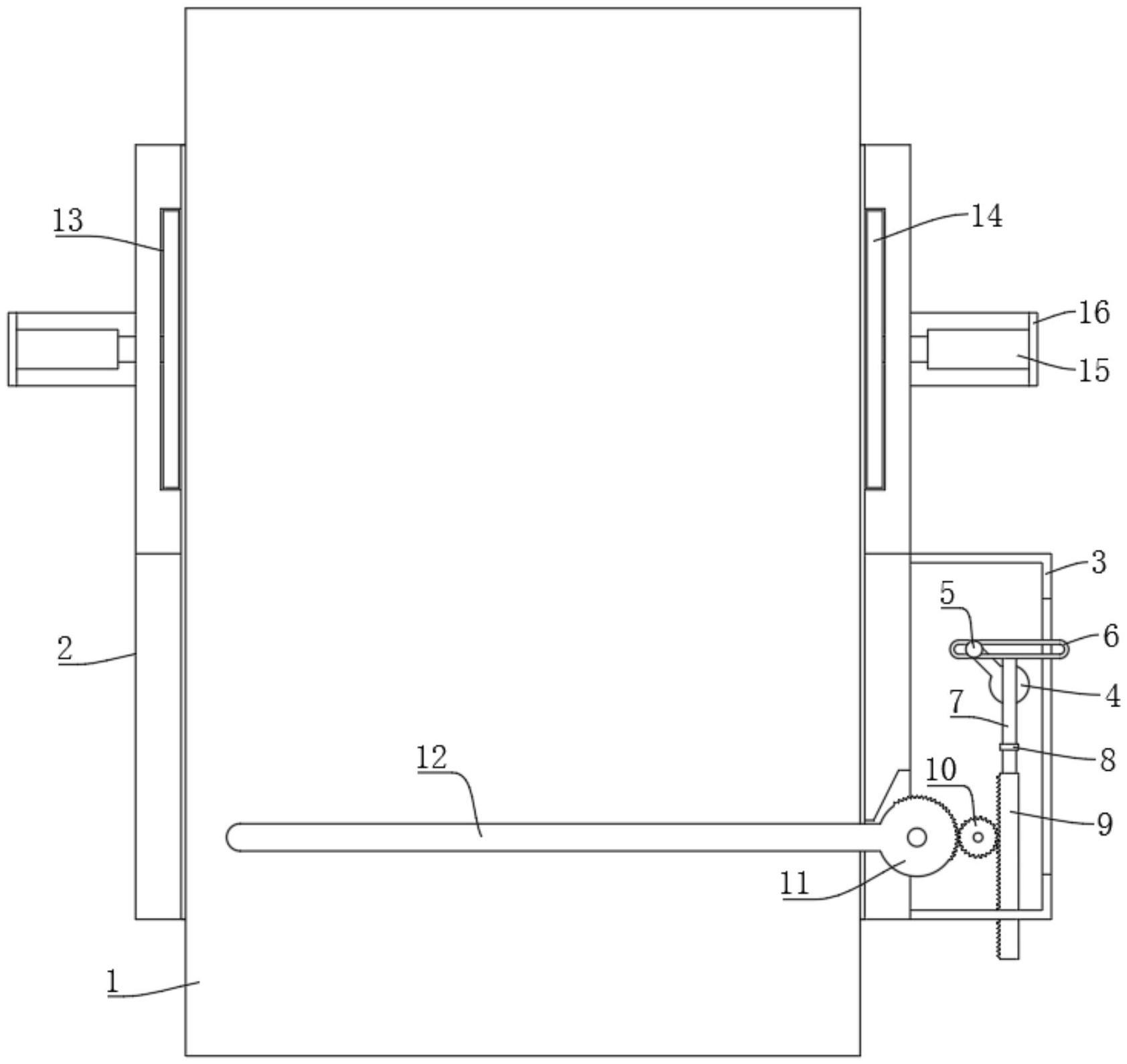
3、设计一种码垛机器人用的输送支撑轨道,包括输送带和安装座,所述安装座固定安装于所述输送带底部,所述安装座一侧固定安装有固定架,所述固定架内部固定安装有主动件,所述主动件一侧啮合连接有联动齿轮,所述联动齿轮一侧啮合连接有不完全齿轮,所述不完全齿轮和联动齿轮均转动设置于所述固定架表面上,所述不完全齿轮一端固定安装有限位杆,所述限位杆端部贯穿所述安装座并延伸至所述输送带上方。
4、优选的,所述主动件包括主动块、连块、往复框、支杆、支撑柱以及齿条,所述主动块下端通过电机转动设置于所述固定架表面上,所述连块与所述主动块一侧固定相连,所述支撑柱固定安装于所述固定架表面,所述支杆滑动贯穿设置于所述支撑柱上端,所述支杆一端与所述往复框固定相连、另一端与所述齿条固定相连,所述连块滑动设置于所述往复框内,所述齿条与所述联动齿轮相互啮合。
5、优选的,所述往复框长度方向与所述支杆长度方向相垂直设置,所述支杆与所述齿条同轴设置。
6、优选的,所述限位杆具有两种位置状态,其一,所述限位杆长度方向与所述齿条长度方向相垂直设置,所述限位杆位于所述输送带上方,其二,所述限位杆长度方向与所述齿条长度方向相平行设置,所述限位杆位于所述输送带一侧。
7、优选的,所述安装座内部还固定安装有对齐件,所述对齐件包括挡板、电动伸缩杆和安装板,所述安装座内侧表面开设有凹槽,所述安装板固定安装于所述安装座外侧表面,所述电动伸缩杆固定安装于所述安装板内侧,所述电动伸缩杆端部贯穿所述安装座并延伸至所述凹槽内,所述电动伸缩杆延伸至所述凹槽内侧的端部与所述挡板固定相连。
8、本实用新型提出的一种码垛机器人用的输送支撑轨道,有益效果在于:该输送支撑轨道在使用时,通过输送带输送物料,通过主动件能够带动联动齿轮转动,联动齿轮转动会带动不完全齿轮转动,不完全齿轮转动会带动限位杆转动,限位杆转动到输送带表面上,通过限位杆对物料进行阻挡,然后通过码垛机器人在进行码垛工作,能够根据具体的需求对主动块转动的速度进行调节,使得限位杆对物料进行阻挡的时间能够满足需要,让码垛机器人能够有足够的时间进行码垛工作。
技术特征:
1.一种码垛机器人用的输送支撑轨道,包括输送带(1)和安装座(2),其特征在于,所述安装座(2)固定安装于所述输送带(1)底部,所述安装座(2)一侧固定安装有固定架(3),所述固定架(3)内部固定安装有主动件,所述主动件一侧啮合连接有联动齿轮(10),所述联动齿轮(10)一侧啮合连接有不完全齿轮(11),所述不完全齿轮(11)和联动齿轮(10)均转动设置于所述固定架(3)表面上,所述不完全齿轮(11)一端固定安装有限位杆(12),所述限位杆(12)端部贯穿所述安装座(2)并延伸至所述输送带(1)上方。
2.根据权利要求1所述的码垛机器人用的输送支撑轨道,其特征在于,所述主动件包括主动块(4)、连块(5)、往复框(6)、支杆(7)、支撑柱(8)以及齿条(9),所述主动块(4)下端通过电机转动设置于所述固定架(3)表面上,所述连块(5)与所述主动块(4)一侧固定相连,所述支撑柱(8)固定安装于所述固定架(3)表面,所述支杆(7)滑动贯穿设置于所述支撑柱(8)上端,所述支杆(7)一端与所述往复框(6)固定相连、另一端与所述齿条(9)固定相连,所述连块(5)滑动设置于所述往复框(6)内,所述齿条(9)与所述联动齿轮(10)相互啮合。
3.根据权利要求2所述的码垛机器人用的输送支撑轨道,其特征在于,所述往复框(6)长度方向与所述支杆(7)长度方向相垂直设置,所述支杆(7)与所述齿条(9)同轴设置。
4.根据权利要求3所述的码垛机器人用的输送支撑轨道,其特征在于,所述限位杆(12)具有两种位置状态,其一,所述限位杆(12)长度方向与所述齿条(9)长度方向相垂直设置,所述限位杆(12)位于所述输送带(1)上方,其二,所述限位杆(12)长度方向与所述齿条长度方向相平行设置,所述限位杆(12)位于所述输送带(1)一侧。
5.根据权利要求1所述的码垛机器人用的输送支撑轨道,其特征在于,所述安装座(2)内部还固定安装有对齐件,所述对齐件包括挡板(14)、电动伸缩杆(15)和安装板(16),所述安装座(2)内侧表面开设有凹槽(13),所述安装板(16)固定安装于所述安装座(2)外侧表面,所述电动伸缩杆(15)固定安装于所述安装板(16)内侧,所述电动伸缩杆(15)端部贯穿所述安装座(2)并延伸至所述凹槽(13)内,所述电动伸缩杆(15)延伸至所述凹槽(13)内侧的端部与所述挡板(14)固定相连。
技术总结
本技术涉及码垛机器人技术领域,尤其是一种码垛机器人用的输送支撑轨道,包括输送带和安装座,所述安装座固定安装于所述输送带底部,所述安装座一侧固定安装有固定架,所述固定架内部固定安装有主动件,所述主动件一侧啮合连接有联动齿轮,所述联动齿轮一侧啮合连接有不完全齿轮,所述不完全齿轮和联动齿轮均转动设置于所述固定架表面上,所述不完全齿轮一端固定安装有限位杆,所述限位杆端部贯穿所述安装座并延伸至所述输送带上方,该输送支撑轨道便于与码垛机器人相配合,提高输送效率,值得推广。
技术研发人员:戚广图,陈敦坚,周春翔
受保护的技术使用者:深圳市华盛控科技有限公司
技术研发日:20221228
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!