货物搬运方法、系统、电子设备及存储介质与流程
本技术涉及自动化,尤其涉及一种货物搬运方法、系统、电子设备及存储介质。
背景技术:
1、在工业物流中,对于同一货物的搬运,可能在搬运过程中需要接驳工具对货物进行转运,从而适应不同的搬运场地。实际应用中,往往需要人工将货物从起点位置搬运到接驳工具的起点,以及人工将货物从接驳工具的终点搬运到目的位置,该方法导致搬运效率较低。因此,如何实现货物在起点位置到接驳工具的起点之间的自动搬运以及货物在接驳工具的终点到目的位置之间的自动搬运,成了工业物流中亟需解决的问题。
技术实现思路
1、本技术实施例公开了一种货物搬运方法、系统、电子设备及存储介质,能够实现货物在起点位置到接驳工具的起点之间的自动搬运以及货物在接驳工具的终点到目的位置之间的自动搬运。
2、本技术实施例公开了一种货物搬运方法,所述方法包括:
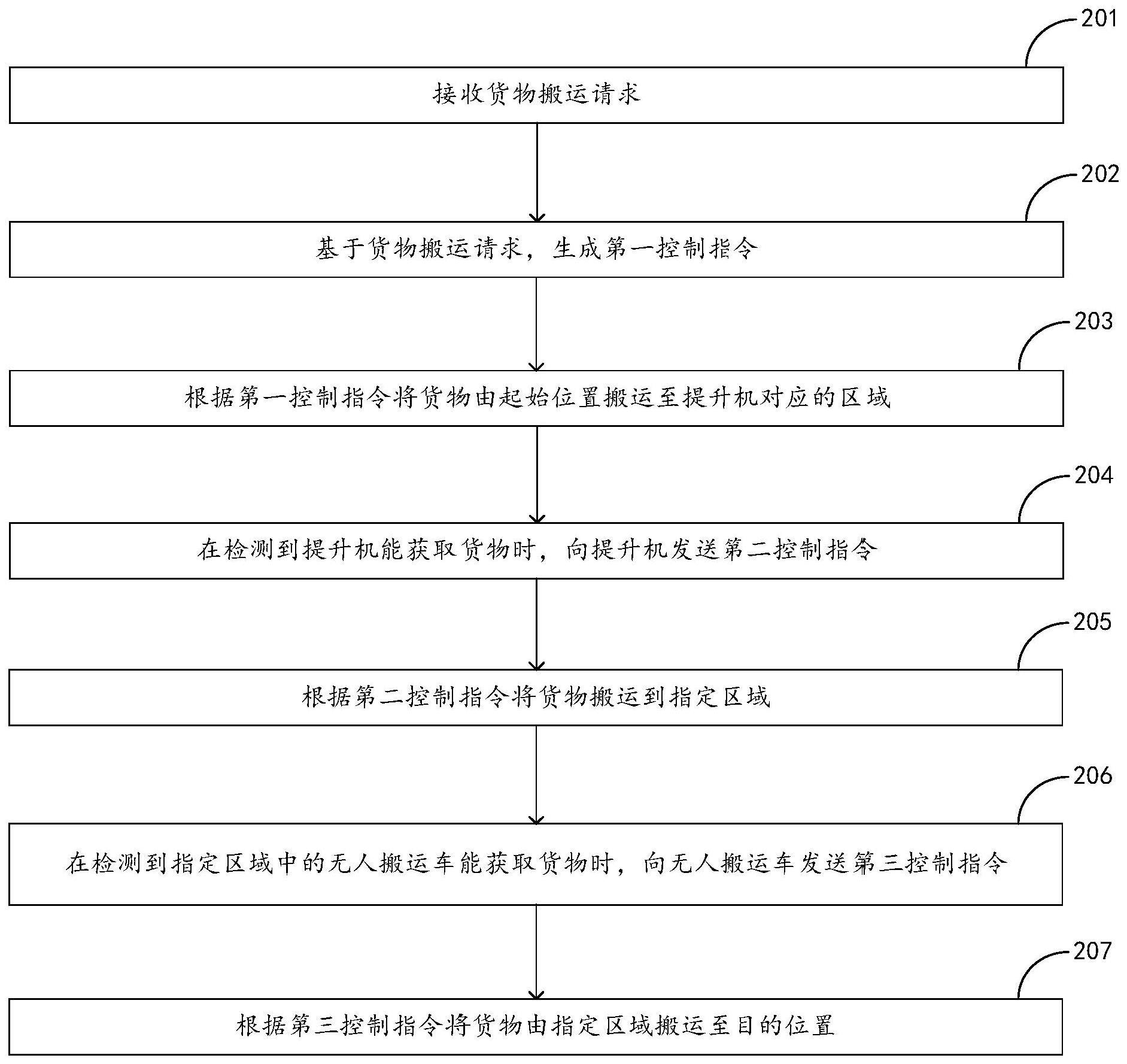
3、接收货物搬运请求,所述货物搬运请求包括起始位置和目的位置;
4、基于所述货物搬运请求,生成第一控制指令;
5、根据所述第一控制指令将货物由所述起始位置搬运至提升机对应的区域;
6、在检测到所述提升机能获取所述货物时,向所述提升机发送第二控制指令;
7、根据所述第二控制指令将所述货物搬运到指定区域;所述指定区域与所述提升机对应的区域分别位于不同高度的楼层;
8、在检测到所述指定区域中的无人搬运车能获取所述货物时,向所述无人搬运车发送第三控制指令;
9、根据所述第三控制指令将所述货物由所述指定区域搬运至所述目的位置。
10、在一个实施例中,当所述货物搬运请求为入库搬运请求,所述起始位置为车间的打包区域,所述指定区域为所述仓库的入库中转区域,所述目的位置为所述仓库内;当所述货物搬运请求为出库搬运请求,所述起始位置为仓库内,所述指定区域为所述仓库的出库中转区域,所述目的位置为出库区域。
11、在一个实施例中,当所述货物搬运请求为所述入库搬运请求,所述提升机对应的区域为入库传送带的起点;
12、当所述货物搬运请求为所述出库搬运请求,所述出库中转区域为出库传送带的起点。
13、在一个实施例中,所述货物搬运请求为入库搬运请求;所述根据所述第一控制指令将货物由所述起始位置搬运至提升机对应的区域,包括:
14、根据所述第一控制指令,前往所述车间的打包区域接驳所述货物,并将所述货物搬运至所述入库传送带的起点;
15、当检测到所述货物由所述入库传送带的起点运输至所述入库传送带的终点时,检测到所述提升机能获取所述货物,相应地,所述第二控制指令为第一货物提升指令;所述根据所述第二控制指令将所述货物搬运到指定区域,包括:
16、根据所述第一货物提升指令,将所述货物从所述入库传送带的终点搬运至所述入库中转区域;
17、当检测到所述货物到达所述入库中转区域时,检测到所述指定区域中的无人搬运车能获取所述货物,相应地,所述第三控制指令为入库搬运指令;所述根据所述第三控制指令将所述货物由所述指定区域搬运至所述目的位置,包括:
18、根据所述入库搬运指令,前往所述入库中转区域中的提升机出口,并将所述货物从所述提升机出口搬运至所述仓库内。
19、在一个实施例中,所述货物搬运请求为出库搬运请求;所述根据所述第一控制指令将货物由所述起始位置搬运至提升机对应的区域,包括:
20、根据所述第一控制指令,前往所述仓库内接驳所述货物,并将所述货物由所述仓库内搬运至所述提升机的入口;
21、当检测到所述货物到达所述提升机的入口时,检测到所述提升机能获取所述货物,相应地,所述第二控制指令为第二货物提升指令;所述根据所述第二控制指令将所述货物搬运到指定区域,包括:
22、根据所述第二货物提升指令,将所述货物搬运至所述出库传送带的起点;
23、当检测到所述货物由所述出库传送带的起点运输至所述出库传送带的终点时,检测到所述指定区域中的无人搬运车能获取所述货物,相应地,所述第三控制指令为货物出库指令;所述根据所述第三控制指令将所述货物由所述指定区域搬运至所述目的位置,包括:
24、根据所述货物出库指令,前往所述出库传送带的终点,并将所述货物从所述出库传送带的终点搬运至所述出库区域。
25、在一个实施例中,所述入库中转区域为所述仓库的指定楼层,所述指定楼层为所述仓库中多个楼层中的其中一个楼层;所述指定楼层设置有光电传感器;所述光电传感器用于检测所述货物是否搬运至所述指定楼层。
26、在一个实施例中,在所述基于所述货物搬运请求,生成第一控制指令之前,所述方法还包括:
27、获取出库需求信息;所述出库需求信息包括生产批次信息和数量信息;
28、根据所述出库需求信息确定所述仓库内的目标库位的位置信息;所述目标库位放置有与所述出库需求信息对应的货物;
29、所述基于所述货物搬运请求,生成第一控制指令,包括:
30、基于所述出库搬运请求和所述目标库位的位置信息,生成第一控制指令;
31、所述根据所述第一控制指令,前往所述仓库内接驳所述货物,并将所述货物搬运至所述提升机的入口,包括:
32、根据所述第一控制指令,前往所述仓库内的目标库位的位置,接驳放置于所述目标库位的货物,并将放置于所述目标库位的货物搬运至所述提升机的入口。
33、本技术实施例公开了一种货物搬运系统,所述货物搬运系统包括主控设备、无人搬运车和提升机;所述系统包括:
34、所述主控设备,用于接收货物搬运请求,所述货物搬运请求包括起始位置和目的位置;
35、所述主控设备,还用于基于所述货物搬运请求,生成第一控制指令;
36、所述无人搬运车,用于根据所述第一控制指令将货物由所述起始位置搬运至提升机对应的区域;
37、所述主控设备,还用于在检测到所述提升机能获取所述货物时,向所述提升机发送第二控制指令;
38、所述提升机,用于根据所述第二控制指令将所述货物搬运到指定区域;所述指定区域与所述提升机对应的区域分别位于不同高度的楼层;
39、所述主控设备,还用于在检测到所述指定区域中的无人搬运车能获取所述货物时,向所述无人搬运车发送第三控制指令;
40、所述无人搬运车,还用于根据所述第三控制指令将所述货物由所述指定区域搬运至所述目的位置。
41、本技术实施例公开了一种电子设备,包括:
42、存储有可执行程序代码的存储器;
43、与所述存储器耦合的处理器;
44、所述处理器调用所述存储器中存储的所述可执行程序代码,执行上述任一实施例所述的方法。
45、本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行上述任一实施例所述的方法。
46、通过本技术实施例公开的货物搬运方法、系统、电子设备及存储介质,接收包括起始位置和目的位置的货物搬运请求,并基于该货物搬运请求生成第一控制指令;根据第一控制指令将货物由起始位置搬运至提升机对应的区域;在检测到提升机能获取货物时,向提升机发送第二控制指令;根据第二控制指令将货物搬运到指定区域;在检测到指定区域中的无人搬运车能获取货物时,向无人搬运车发送第三控制指令;根据第三控制指令将货物由指定区域搬运至目的位置。本技术实施例中,将货物从起始位置自动搬运至提升机对应的区域,通过提升机将货物自动搬运至位于不同楼层的指定区域,以及无人搬运车将货物从指定区域自动搬运至目的位置,能够实现货物在起点位置到接驳工具的起点之间的自动搬运以及货物在接驳工具的终点到目的位置之间的自动搬运,从而提高货物的搬运效率。
- 还没有人留言评论。精彩留言会获得点赞!