一种室内医用物流搬运机器人的制作方法
本发明属于室内医用物流搬运,特别涉及一种室内医用物流搬运机器人。
背景技术:
1、受限于室内医用物流搬运机器人的使用方法,其在进行医用物流搬运的时候,将会面临多种使用情况,但不仅限于以下提出的一种,更具体的是,尤其为医用物流有不同种类的物品,且物品的规格也不相同,由于搬运机器人的承托医用物流物品的部位大小是固定,在其搬运较小规格物品时可以进行搬运,但遇到较大规格物品时无法完全对其进行承托,容易造成中心不稳,进而造成侧翻,严重时会损坏物品。
2、且受限于搬运机器人主要在室内进行医用物流的搬运工作,常规搬运机器人主要依靠重力将物品限制在其承托部位,由于医院内部人流量较大,在其搬运时,极易因前方障碍而急停或造成误碰,导致物品从搬运机器人上掉落的情况,因此不仅会对物品运输工作造成一定的影响,还极易造成误碰损坏。
3、结合上述两点问题切入点会发现,目前市场上的现有室内医用物流搬运机器人在进行使用的时候,很难同时去规避以上提出的问题,并且,即便是能够进行解决,也需要去接入外接装置,从而无法达到我们所期望的效果,故而,我们提出了一种在进行使用的时候,能够对不同规格的医用物流物品进行承托运输工作,以及对物品进行限位的室内医用物流搬运机器人。
技术实现思路
1、本发明的目的在于针对现有的一种室内医用物流搬运机器人,其优点是通过设置扩展机构,通过角度调整组件、延伸组件、稳定组件以及贴合组件的配合使用下,可以根据医用物流物品的规格对搬运机器人主体的承托面积进行调整,便于对不同规格的物品进行承托以及运输工作,极大程度的提高了搬运机器人主体的灵活使用性以及搬运效率,而且还可避免因物品规格较大而出现侧翻以及损坏物品的情况出现,通过设置吸附机构,在承托物品时,吸附机构可以将物品限制在搬运机器人主体的承托部位,可以在运输过程中,代替仅依靠重力的方式来固定物品,可以防止因前方障碍而急停导致物品或因其他人误碰物品导致掉落的情况出现,从而能够保证医用物流物品运输的安全性。
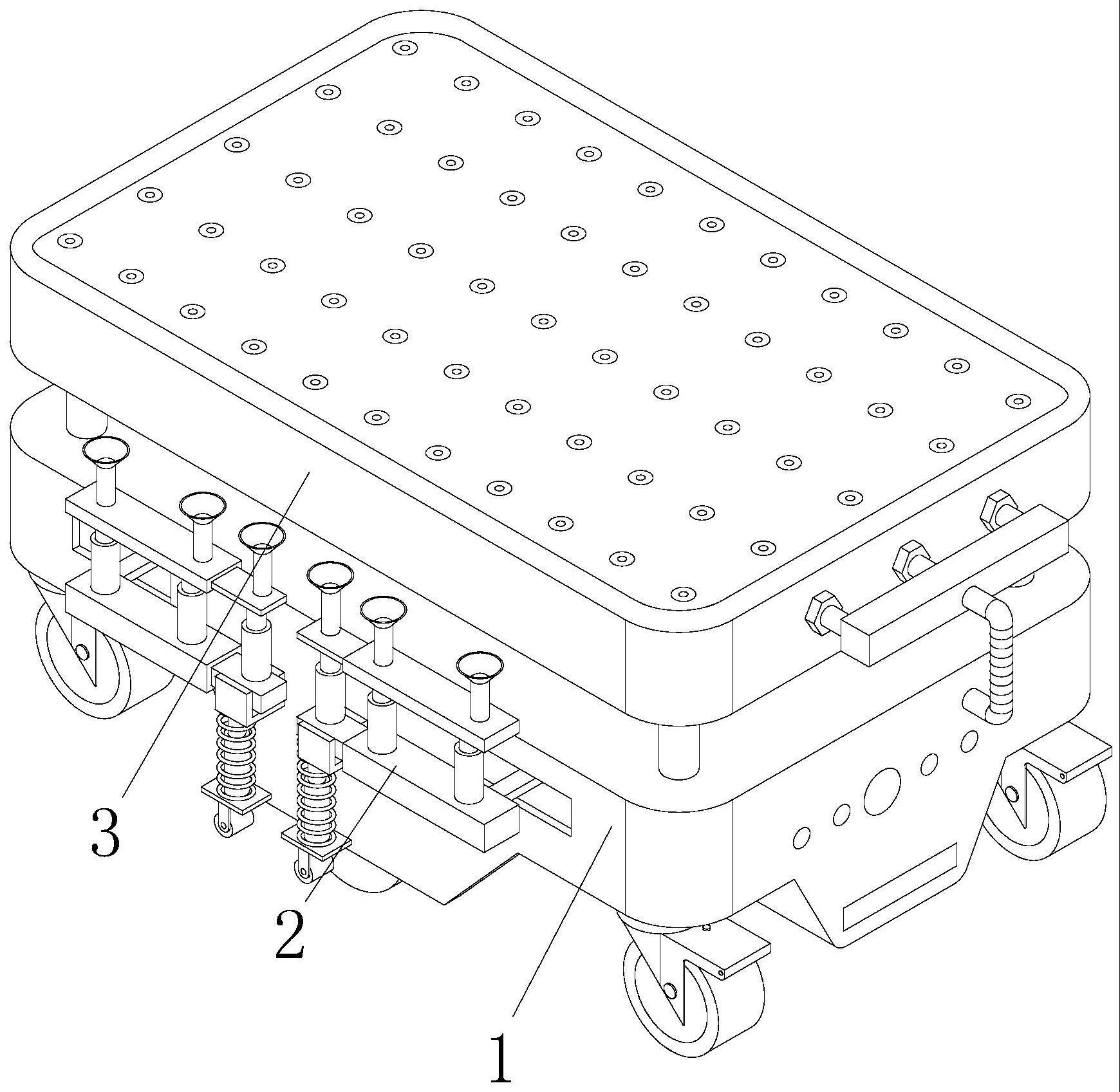
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种室内医用物流搬运机器人,包括搬运机器人主体、扩展机构和吸附机构,所述吸附机构设置在搬运机器人主体的顶部,所述扩展机构设置在搬运机器人主体的两侧;
3、所述扩展机构包括角度调整组件,所述角度调整组件的栓接在搬运机器人主体内部的两侧,所述角度调整组件远离搬运机器人主体内壁的一侧栓接有延伸组件,所述延伸组件远离角度调整组件的一侧延伸至搬运机器人主体的外侧,所述延伸组件的底部栓接有稳定组件,所述延伸组件的顶部栓接有贴合组件。
4、采用上述技术方案,通过设置扩展机构,通过角度调整组件、延伸组件、稳定组件以及贴合组件的配合使用下,可以根据医用物流物品的规格对搬运机器人主体的承托面积进行调整,便于对不同规格的物品进行承托以及运输工作,极大程度的提高了搬运机器人主体的灵活使用性以及搬运效率,而且还可避免因物品规格较大而出现侧翻以及损坏物品的情况出现,通过设置吸附机构,在承托物品时,吸附机构可以将物品限制在搬运机器人主体的承托部位,可以在运输过程中,代替仅依靠重力的方式来固定物品,可以防止因前方障碍而急停导致物品或因其他人误碰物品导致掉落的情况出现,从而能够保证医用物流物品运输的安全性。
5、本发明进一步设置为:所述角度调整组件包括移动部,所述移动部栓接在搬运机器人主体内部的两侧,所述移动部的前侧和后侧均转动连接有连接架,所述连接架的顶部的转动连接有转动板,所述转动板的底部焊接与支撑柱,所述支撑柱与搬运机器人主体的内壁转动连接,所述转动板靠近过搬运机器人主体内壁的一侧焊接有连接板,所述连接板靠近延伸组件的一侧与延伸组件栓接。
6、采用上述技术方案,通过设置角度调整组件,在需对较大规格物品承托时,可通过移动部收缩,使连接架带动转动板在支撑柱的表面转动,从而通过连接板带动两侧的前后延伸组件同步向外侧转动,使得两侧的前后延伸组件可以与搬运机器人主体之间形成三角关系,从而便于对延伸组件的角度进行调整。
7、本发明进一步设置为:所述移动部包括固定壳体,所述固定壳体的前侧和后侧均连通有固定筒,所述固定筒的内部转动连接有丝杆,两个丝杆相对的一侧之间焊接有从动轴,所述固定壳体前侧的右侧栓接有步进电机,所述步进电机的后侧栓接有主动轴,所述主动轴的后侧延伸至固定壳体的内部并与固定壳体转动连接,所述主动轴和从动轴的表面分别套接有主动轮和从动轮,所述主动轮的表面缠绕有传动带,所述传动带的内壁与从动轮的表面接触,所述丝杆的表面螺纹连接有螺套,所述螺套靠近连接架的一侧与连接架转动连接。
8、采用上述技术方案,通过设置移动部,通过步进电机驱动主动轴转动,使主动轴带动主动轮转动,在传动带的作用下,可以使从动轮带动从动轴转动,从而使前后的丝杆同步转动,并在丝杆与螺套的螺纹配合下,使螺套从固定筒的内部伸出或回缩,从而便于调整延伸组件的转动角度,使其调整为收拢或扩张状态。
9、本发明进一步设置为:所述延伸组件包括固定板,所述固定板的内部滑动连接有延长板,所述固定板的底部转动连接有驱动齿轮,所述延长板的底部栓接有延长框架,所述延长框架内壁的左侧焊接与若干个齿牙,所述齿牙与驱动齿轮相啮合,所述延长框架与固定板滑动连接。
10、采用上述技术方案,通过设置延伸组件,通过驱动齿轮与齿牙的啮合连接下,使得驱动轮可以驱动延长框架进行移动,使得延长框架能够带动延长板进出或移出固定板的内部,从而能够扩大承托面积,达到了灵活使用的效果。
11、本发明进一步设置为:所述稳定组件包括u形架,所述u形架栓接在延长板的表面,所述u形架的底部栓接与伸缩件,所述伸缩件的底部栓接有安装板,所述安装板的底部栓接有稳定轮,所述伸缩件的表面套接有稳定弹簧,所述稳定弹簧的顶部和底部分别与连接板和u形架栓接。
12、采用上述技术方案,通过设置稳定组件,在延伸组件的延伸下,可以使得稳定轮与地面接触,使得能够增大搬运机器人主体与地面的接触面积,同时在地面不平时,伸缩件和稳定弹簧的作用下,能够使稳定轮始终与地面接触,保证搬运机器人主体在移动过程中的稳定性。
13、本发明进一步设置为:所述贴合组件包括电动伸缩杆,所述电动伸缩杆分别栓接在固定板和延长板的顶部,后侧所述电动伸缩杆的顶部栓接有配合板,所述配合板的内部滑动连接有同步板,所述同步板的底部与前侧电动伸缩杆栓接,所述配合板和同步板的顶部均栓接有支撑杆,所述支撑杆的顶部套接有锥形胶套。
14、采用上述技术方案,通过设置贴合组件,通过电动伸缩杆的伸缩端伸出或回缩,可以使得支撑杆顶部的锥形胶套能够与物品的底部接触,并在锥形胶套的弹性作用下,能够与物品的底部形状贴合,保证对物品的承托稳固性。
15、本发明进一步设置为:所述支撑柱表面的顶部套接有轴承座,所述支撑柱通过轴承座与搬运机器人主体的内壁转动连接。
16、采用上述技术方案,通过设置轴承座,可以实现支撑柱与搬运机器人主体的转动连接,使得能够以支撑柱为支点而使转动板进行转动。
17、本发明进一步设置为:所述吸附组件包括框架体,所述框架体滑动连接在搬运机器人主体的顶部,所述框架体的顶部栓接有吸附盖板,所述吸附盖板的顶部开设有吸附孔,所述框架体的内部焊接有分隔部,所述分隔部的内部连通有支管,所述支管的后侧延伸至框架体的后侧,所述分隔部的前侧延伸至框架体的前侧并连通有多通道阀门,所述多通道阀门的前侧连通有抽气管,所述抽气管的后侧连通有真空泵,所述真空泵栓接在搬运机器人主体的内部。
18、采用上述技术方案,通过设置吸附组件,通过框架体与搬运机器人为外设升降设施连接,可以在其作用下,使吸附盖板与物品的底部接触,并在真空泵、抽气管和多通道阀门的配合使用下,将框架体的内部气体排出,使其内部保持真空状态,基于真空吸附的原理,将物品牢牢的固定在吸附盖板上,可以在运输过程中,代替仅依靠重力的方式来固定物品,可以防止因前方障碍而急停导致物品或因其他人误碰物品导致掉落的情况出现,从而能够保证医用物流物品运输的安全性,并且在分隔部的作用下,可以根据物品规格将框架体内分隔为多个吸附区域,一方面避免了对所有的框架体内部空腔抽真空,造成抽气效率降低、抽气时间长的弊端,另一方面,多个区域之间相互隔绝、密封,选择某些区域进行吸附固定,更好的避免了能源消耗增加的问题,通过支管的作用下,可以快速解除框架体内的真空状态,已便于使物品与吸附盖板分离。
19、本发明进一步设置为:所述分隔部包括第一环形隔板和第二环形隔板,所述第一环形隔板和第二环形隔板均焊接在框架体的内部,且第一环形隔板的直径小于第二环形隔板,所述第一环形隔板的前侧连通有第一连通管,所述第一连通管的前侧贯穿第二环形隔板的内部,所述第二环形隔板的前侧连通有第二连通管,所述框架体内壁的右侧连通有第三连通管,所述第一连通管、第二连通管和第三连通管的前侧均与多通道阀门连通。
20、采用上述技术方案,通过设置分隔部,通过第一环形隔板和第二环形隔板,可以将框架体的内部分隔为多个吸附区域,并且与对应的吸附孔连通,并在第一连通管、第二连通管以及第三连通管的连接下,对不同区域的空腔进行抽气工作,因此能够一方面避免了对所有的框架体内部空腔抽真空,造成抽气效率降低、抽气时间长的弊端,另一方面,多个区域之间相互隔绝、密封,选择某些区域进行吸附固定,更好的避免了能源消耗增加的问题。
21、本发明进一步设置为:所述第一环形隔板和第二环形隔板的顶部均与吸附盖板的底部紧密接触,所述框架体的内壁焊接有支板,所述吸附盖板通过支板与框架体栓接,所述吸附盖板的底部粘接有密封件,所述密封件与支板紧密接触。
22、采用上述技术方案,通过设置支板,可以便于对吸附盖板进行固定,通过设置密封件,可以达到对吸附盖板与框架体之间连接处进行密封的效果,避免出现泄露的情况。
23、综上所述,本发明具有以下有益效果:
24、1、通过设置扩展机构,通过角度调整组件、延伸组件、稳定组件以及贴合组件的配合使用下,可以根据医用物流物品的规格对搬运机器人主体的承托面积进行调整,便于对不同规格的物品进行承托以及运输工作,极大程度的提高了搬运机器人主体的灵活使用性以及搬运效率,而且还可避免因物品规格较大而出现侧翻以及损坏物品的情况出现;
25、2、通过设置吸附机构,在承托物品时,吸附机构可以将物品限制在搬运机器人主体的承托部位,可以在运输过程中,代替仅依靠重力的方式来固定物品,可以防止因前方障碍而急停导致物品或因其他人误碰物品导致掉落的情况出现,从而能够保证医用物流物品运输的安全性。
- 还没有人留言评论。精彩留言会获得点赞!