遥控扒渣机传送带姿态自动调整控制方法及系统与流程
本发明涉及扒渣机设备,具体而言,涉及一种遥控扒渣机传送带姿态自动调整控制方法及系统。
背景技术:
1、目前,遥控扒渣机是专门为地下作业面设计的专用设备,是地下矿山完成爆破开洞后对崩落矿石进行铲装、运输等联合作业、规模化开采的新型智能化铲运装备。在遥控扒渣机工作过程中,往往会因为传送带的姿态位置影响遥控扒渣机的工作效率。现有的遥控一般是由操作者根据路况情况、视频显示观察判断及工作经验进行调整操控,效果较差,效率较低。
技术实现思路
1、为此,本发明提供了一种遥控扒渣机传送带姿态自动调整控制方法及系统,以解决现有技术在遥控扒渣机工作过程中,会因为传送带的姿态位置影响遥控扒渣机的工作效率,常规根据路况情况、视频显示观察判断及工作经验进行调整操控,整体效果较差,效率较低,易造成设备损坏的技术问题。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种遥控扒渣机传送带姿态自动调整控制方法,包括如下步骤:
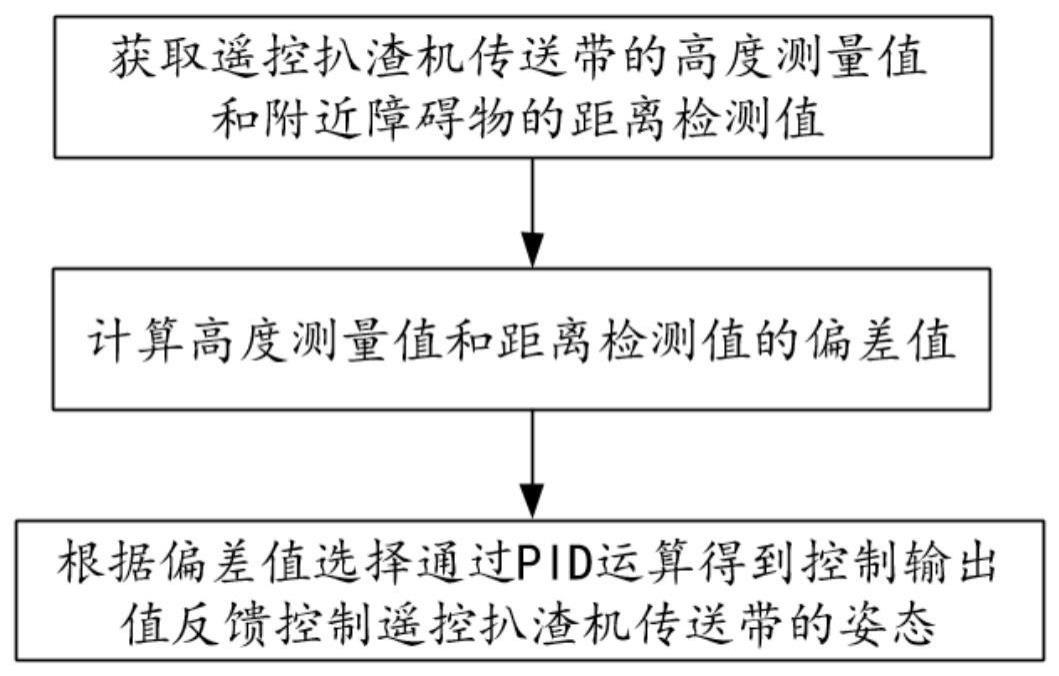
4、获取遥控扒渣机传送带的高度测量值和附近障碍物的距离检测值;
5、计算高度测量值和距离检测值的偏差值;
6、根据偏差值选择通过pid运算得到控制输出值反馈控制遥控扒渣机传送带的姿态。
7、在上述技术方案的基础上,对本发明做如下进一步说明:
8、作为本发明的进一步方案,所述获取遥控扒渣机传送带的高度测量值和附近障碍物的距离检测值,具体包括:
9、通过在传送带安装的超声波传感器获得传送带的高度测量值及附近障碍物的距离检测值。
10、作为本发明的进一步方案,所述计算高度测量值和距离检测值的偏差值,根据偏差值选择通过pid运算得到控制输出值反馈控制遥控扒渣机传送带的姿态,具体包括:
11、当高度测量值大于或等于距离检测值时,通过pid运算得到控制器输出信号控制所述遥控扒渣机传送带到距离设定值的位置;
12、当高度测量值小于距离检测值时,获取遥控扒渣机传送带的姿态初值,通过pid运算得到调节值,反馈控制所述遥控扒渣机传送带的高度。
13、作为本发明的进一步方案,所述当高度测量值大于或等于距离检测值时,通过pid运算得到控制器输出信号控制所述遥控扒渣机传送带到距离设定值的位置,具体包括:
14、当所述高度测量值大于或等于所述障碍物距离检测值时,控制所述遥控扒渣机传送带降低高度,直至所述高度测量值降低至预设的距离设定值的安全范围内。
15、作为本发明的进一步方案,所述获取遥控扒渣机传送带的姿态初值,具体包括:
16、当传送带直接或间接传动相连的动作油缸没有动作,所述遥控扒渣机有行驶或转向动作,且保持预设时间时,获取所述遥控扒渣机传送带的姿态初值。
17、作为本发明的进一步方案,所述pid运算为:
18、y=s+k∫(h-x)dx
19、其中,y为控制输出值,k为比例系数,s为预设常数,h为高度测量值,x为距离测量值。
20、一种应用所述的遥控扒渣机传送带姿态自动调整控制方法的控制系统,所述控制系统包括:
21、检测模块,装配于所述传送带;
22、控制模块,控制输入端与所述检测模块的输出端之间电连接;
23、执行机构,与所述控制模块的控制输出端之间电连接,且所述执行机构与所述传送带之间传动装配相连。
24、作为本发明的进一步方案,所述检测模块包括超声波传感器和/或传送带角度传感器;
25、所述超声波传感器的输出端与所述控制模块的控制输入端之间电连接;
26、和/或,所述传送带角度传感器的输出端与所述控制模块的控制输入端之间电连接。
27、作为本发明的进一步方案,所述控制模块为车载控制器;
28、所述超声波传感器的输出端与所述车载控制器的控制输入端之间电连接;
29、和/或,所述传送带角度传感器的输出端与所述车载控制器的控制输入端之间电连接。
30、作为本发明的进一步方案,所述执行机构包括举升电磁阀、下降电磁阀和动作油缸;
31、所述车载控制器的控制端口分别与所述举升电磁阀、所述下降电磁阀的输入端口之间相连接,所述举升电磁阀、所述下降电磁阀的输出端口分别与所述动作油缸之间相连接,所述动作油缸与所述传送带之间传动相连。
32、本发明具有如下有益效果:
33、该方法及系统,能够实现当高度测量值大于或等于距离检测值时,进行pi d计算控制遥控扒渣机传送带降低高度,直至高度测量值降低至预设的距离设定值,由此可以达到快速响应,达到快速、稳定的控制效果,并且当高度测量值小于距离检测值时,通过获取遥控扒渣机传送带的姿态初值,通过p i d运算得到调节值,反馈控制遥控扒渣机传送带的高度,有效提升了功能实用性。
技术特征:
1.一种遥控扒渣机传送带姿态自动调整控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的遥控扒渣机传送带姿态自动调整控制方法,其特征在于,
3.根据权利要求1所述的遥控扒渣机传送带姿态自动调整控制方法,其特征在于,
4.根据权利要求3所述的遥控扒渣机传送带姿态自动调整控制方法,其特征在于,
5.根据权利要求3所述的遥控扒渣机传送带姿态自动调整控制方法,其特征在于,
6.根据权利要求3所述的遥控扒渣机传送带姿态自动调整控制方法,其特征在于,
7.一种应用如权利要求1-6任一项所述的遥控扒渣机传送带姿态自动调整控制方法的控制系统,其特征在于,所述控制系统包括:
8.根据权利要求7所述的遥控扒渣机传送带姿态自动调整控制系统,其特征在于,
9.根据权利要求8所述的遥控扒渣机传送带姿态自动调整控制系统,其特征在于,
10.根据权利要求9所述的遥控扒渣机传送带姿态自动调整控制系统,其特征在于,
技术总结
本发明公开了一种遥控扒渣机传送带姿态自动调整控制方法及系统,属于扒渣机技术领域,其包括如下步骤:获取遥控扒渣机传送带的高度测量值和附近障碍物的距离检测值;计算高度测量值和距离检测值的偏差值;根据偏差值选择通过PID运算得到控制输出值反馈控制遥控扒渣机传送带的姿态。该方法及系统,能够实现当高度测量值大于或等于距离检测值时,进行PID计算控制遥控扒渣机传送带降低高度,直至高度测量值降低至预设的距离设定值,由此可以达到快速响应,达到快速、稳定的控制效果,并且当高度测量值小于距离检测值时,通过获取遥控扒渣机传送带的姿态初值,通过PID运算得到调节值,反馈控制遥控扒渣机传送带的高度,有效提升了功能实用性。
技术研发人员:黄恒,张道国,邓友琳,宋威
受保护的技术使用者:浩特(成都)智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!