一种同轨道多台起重机的大车位置校准方法及系统与流程
本发明涉及起重机,尤其涉及一种同轨道多台起重机的大车位置校准方法及系统。
背景技术:
1、目前港口起重机大车行走机构精确定位的常规方案,是在起重机的大车行走机构上设置绝对值编码器用于精确计算大车行走的实际位置。但是由于大车轨道的变形、雪天打滑等众多原因,绝对值编码器会产生误差,长期累积,误差会逐步增大,导致计算精度偏差较大,为了避免大车绝对值编码器产生累积误差,通常要通过校正限位定期对编码器检测的位置进行校正。
2、校正方式采用较多的是单台起重机在固定区域使用校正限位进行的编码器校正。大车绝对值编码器一般采用磁簧开关进行校正,当磁簧开关经过磁块时在磁感应的作用下,磁簧开关辅助接点动作,信号提供给plc,在plc程序内对大车绝对值编码器的计算位置和实际位置进行对比并校正,确保绝对值编码器的物理位置准确。
3、通常情况,对于同轨道的多台起重机,特别是行走作业区域复杂多变的起重机,因每一台起重机只能设置一个绝对校正位置,绝对值编码器的校正工作相对要复杂很多,操作起来也不方便:1)需要频繁回到绝对校正位置刷校正磁块后再进行正常工作,同时如果回绝对校正位置时行走路线上有其他起重机作业,则其他起重机需要停止作业、进行避让,相对引起整个码头作业效率严重降低;2)为避免各台起重机的校正工作相互干扰,校正限位的安装位置及形式需要进行区分,同轨道起重机数量多时,该方法无法实现。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种同轨道多台起重机的大车位置校准方法及系统,起重机在固定区域行走时,预先确定校正基准磁块位置;起重机在校正基准磁块设定范围内做往复运动,通过大车绝对值编码器计算位置与对应磁块绝对位置比对,校正大车位置;实现大车绝对值编码器的准确校正,确保起重机大车绝对值编码器计算的实际位置准确,避免起重机之间的相互干扰。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、第一方面,本发明的实施例提供了一种同轨道多台起重机的大车位置校准方法,每台起重机安装磁簧开关,沿轨道长度方向间隔均匀设置与起重机数目相同的磁块;
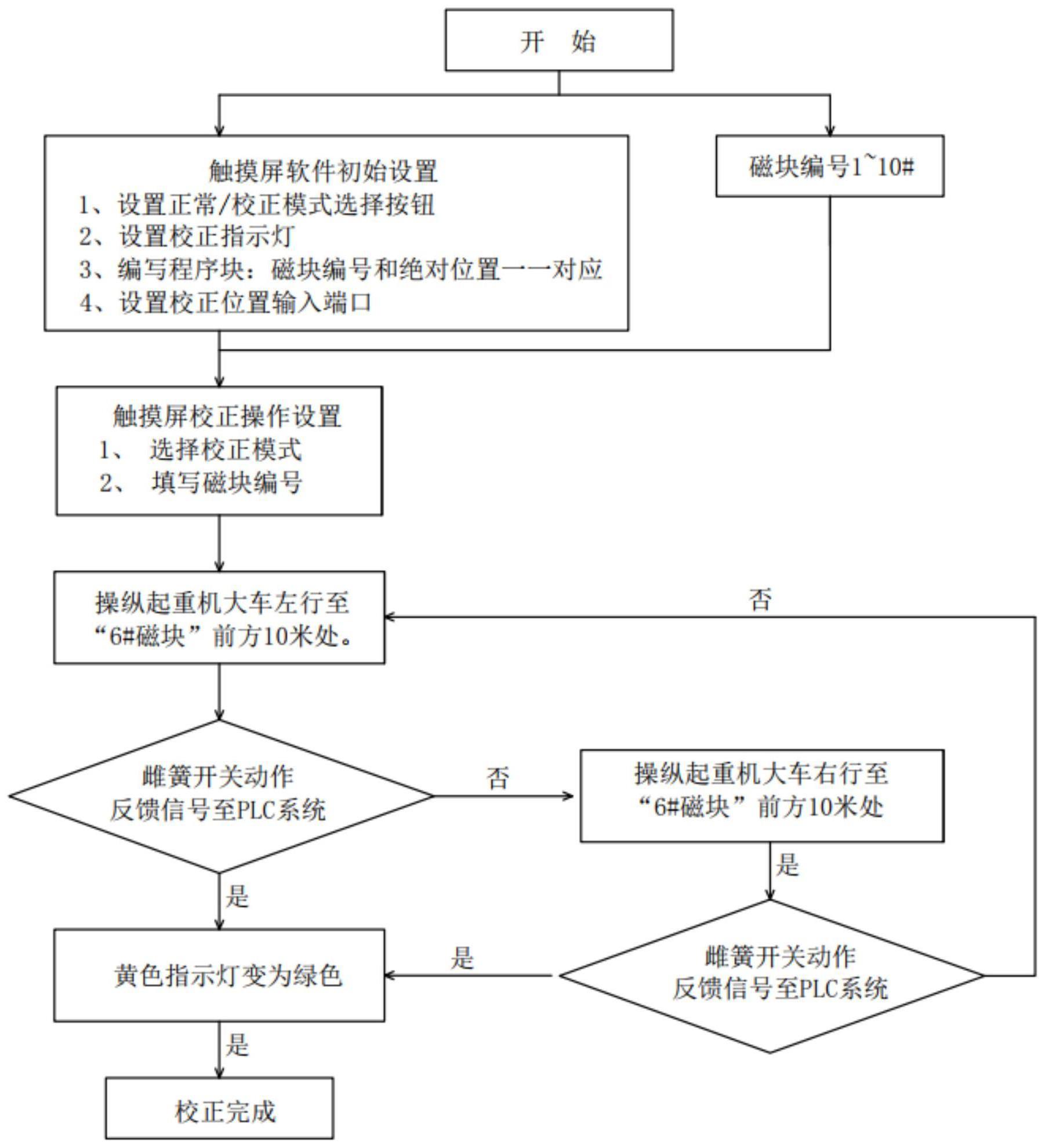
4、轨道上任意起重机在固定区域行走时,预先确定校正基准磁块位置及代号;起重机在校正基准磁块设定范围10m内做往复运动,通过大车绝对值编码器计算位置与对应磁块绝对位置比对,校正大车位置。
5、磁簧开关的工作原理:所选磁簧开关为自稳态式开关产品,即当磁簧开关刷到距其最近的第一个磁块时触点动作,同方向继续行走,刷到后面磁块后触点不再动作,只有反方向行走再次刷到第一个磁块时触点才会动作。
6、作为进一步的实现方式,以距离当前起重机频繁经过的磁块为校正基准磁块。
7、作为进一步的实现方式,所述固定区域为起重机的行程范围。
8、作为进一步的实现方式,所述磁簧开关安装于起重机大车行走机构顺轨道方向。
9、作为进一步的实现方式,将磁块顺轨道长度方向埋于地面,并对磁块进行编号。
10、第二方面,本发明的实施例提供了一种同轨道多台起重机的大车位置校准系统,包括磁簧开关、磁块、触摸屏,每台起重机安装磁簧开关,沿轨道长度方向间隔均匀设置与起重机数目相同的磁块;
11、所述触摸屏存储有校正程序,用于显示并设置校正参数信息。
12、作为进一步的实现方式,起重机在固定区域行走时,在触摸屏上设置校正基准磁块信息。
13、作为进一步的实现方式,所述校正参数信息包括磁块编号、计算位置以及当前实际位置。
14、作为进一步的实现方式,所述触摸屏具有指示灯,在校正模式下指示灯为黄色,在校正完成后变为绿色。
15、本发明的有益效果如下:
16、本发明的起重机在固定区域行走时,预先确定校正基准磁块位置;起重机在校正基准磁块设定范围内做往复运动,通过大车绝对值编码器计算位置与对应磁块实际位置比对,校正大车位置;实现大车绝对值编码器的准确校正,确保起重机大车绝对值编码器计算的实际位置准确,避免校正过程中起重机之间的相互干扰。
技术特征:
1.一种同轨道多台起重机的大车位置校准方法,其特征在于,每台起重机安装磁簧开关,沿轨道长度方向间隔均匀设置与起重机数目相同的磁块;
2.根据权利要求1所述的一种同轨道多台起重机的大车位置校准方法,其特征在于,当磁簧开关刷到距其最近的第一个磁块时触点动作,同方向继续行走,刷到后面磁块后触点不再动作,只有反方向行走再次刷到第一个磁块时触点才会动作。
3.根据权利要求1所述的一种同轨道多台起重机的大车位置校准方法,其特征在于,以距离当前起重机频繁经过的磁块为校正基准磁块。
4.根据权利要求1所述的一种同轨道多台起重机的大车位置校准方法,其特征在于,所述固定区域为起重机的行程范围。
5.根据权利要求1所述的一种同轨道多台起重机的大车位置校准方法,其特征在于,所述磁簧开关安装于起重机大车行走机构顺轨道方向。
6.根据权利要求1所述的一种同轨道多台起重机的大车位置校准方法,其特征在于,对磁块沿轨道长度方向顺序编号。
7.一种同轨道多台起重机的大车位置校准系统,其特征在于,包括磁簧开关、磁块、触摸屏,每台起重机安装磁簧开关,沿轨道长度方向间隔均匀设置与起重机数目相同的磁块;
8.根据权利要求7所述的一种同轨道多台起重机的大车位置校准系统,其特征在于,起重机在固定区域行走时,在触摸屏上设置校正基准磁块信息。
9.根据权利要求7所述的一种同轨道多台起重机的大车位置校准系统,其特征在于,所述校正参数信息包括磁块编号、计算位置以及当前实际位置。
10.根据权利要求7所述的一种同轨道多台起重机的大车位置校准系统,其特征在于,所述触摸屏具有指示灯,在校正模式下指示灯为黄色,在校正完成后为绿色。
技术总结
本发明公开了一种同轨道多台起重机的大车位置校准方法及系统,涉及起重机技术领域,每台起重机安装磁簧开关,沿轨道长度方向间隔均匀设置与起重机数目相同的磁块;轨道上任意起重机在固定区域行走时,预先确定校正基准磁块位置及代号;起重机在校正基准磁块设定范围内做往复运动,通过大车绝对值编码器计算位置与对应磁块绝对位置比对,校正大车位置。本发明能够实现大车绝对值编码器的准确校正,确保起重机大车绝对值编码器计算的位置准确,避免校正过程中起重机之间的相互干扰。
技术研发人员:孙慧利,李书强,马著凯,宋祥吉,曹仁政,王云鹏,韩旭,陈鹏元
受保护的技术使用者:青岛海西重机有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!