一种群塔作业防碰撞方法及系统与流程
本发明涉及塔吊智能安全检测,具体为一种群塔作业防碰撞方法及系统。
背景技术:
1、在大体量的建筑工地,群塔作业的现象不可避免。由于很多建筑工地处于城市地段,群体性建筑项目越来越多,为满足整体的施工进度,塔式起重机往往作业时回转速度快,而群塔作业又存在着复杂性与不确定性,所以存在着巨大的安全隐患。塔式起重机作业为高空作业,且吊装的物体往往是钢筋等大质量的材料,一旦群塔作业发生碰撞时,会带来不可换回的损失,所以对群塔作业防碰撞的研究具有十分重大的意义。
技术实现思路
1、(一)发明目的
2、本发明是为了解决现有检测技术的缺点和困难,从而提出了一种群塔作业防碰撞方法及系统。
3、(二)技术方案
4、为解决上述问题,本发明第一方面提供了一种群塔作业防碰撞方法,包括如下步骤:
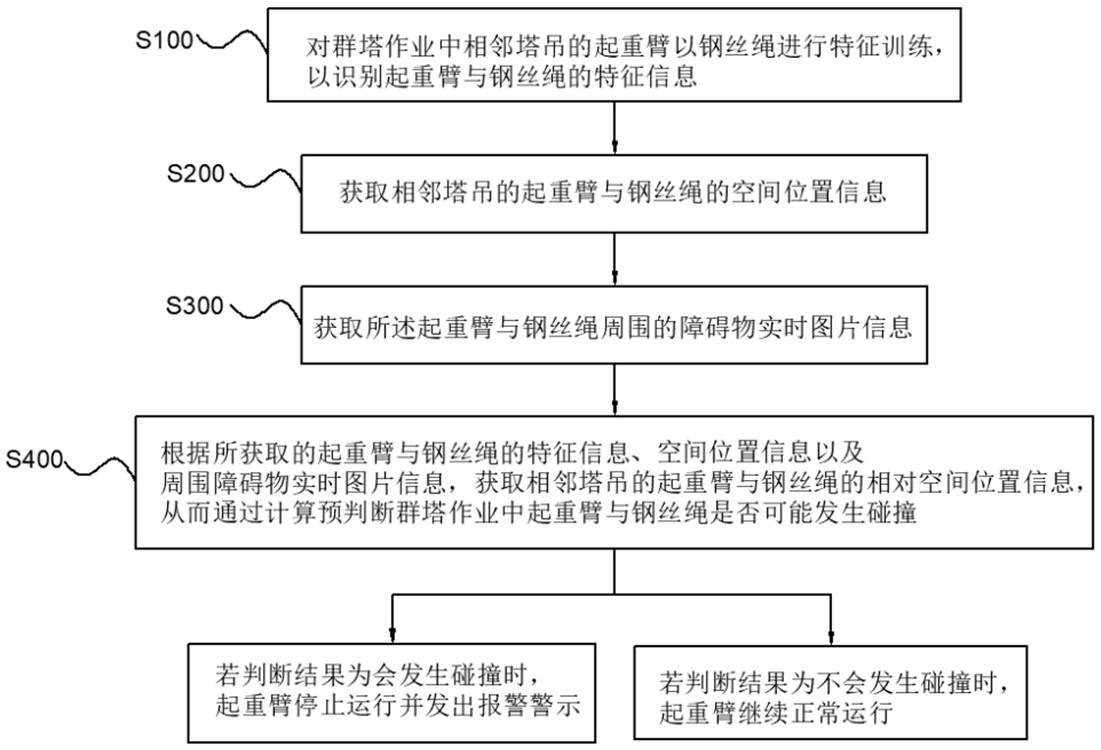
5、步骤s100,对群塔作业中相邻塔吊的起重臂以钢丝绳进行特征训练,以识别起重臂与钢丝绳的特征信息;
6、步骤s200,获取相邻塔吊的起重臂与钢丝绳的空间位置信息;
7、步骤s300,获取所述起重臂与钢丝绳周围的障碍物实时图片信息;
8、步骤s400,根据所获取的起重臂与钢丝绳的特征信息、空间位置信息以及周围障碍物实时图片信息,获取相邻塔吊的起重臂与钢丝绳的相对空间位置信息,从而通过计算预判断群塔作业中起重臂与钢丝绳是否可能发生碰撞;
9、若判断结果为会发生碰撞时,起重臂停止运行并发出报警警示;
10、若判断结果为不会发生碰撞时,起重臂继续正常运行。
11、作为本发明的一个技术方案,所述步骤s200中获取相邻塔吊的起重臂与钢丝绳的空间位置信息,包括:
12、在起重臂的固定位置至少设置一个相机,用于对分别设置于起重臂与钢丝绳上的标志物a和标志物b进行追踪识别;
13、在起重臂的相机可视位置平行均匀贴附标志物a,以获取起重臂运转状态下的实时相对空间位置;
14、在钢丝绳末端的捆扎机构上贴附标志物b,以获取钢丝绳随起重臂运转状态下的实际实时相对空间位置。
15、作为本发明的一个技术方案,所述步骤s300中,还包括:
16、对所获取的障碍物实时图片信息进行分析处理,以获取障碍物与运转状态下的起重臂和钢丝绳的空间距离;
17、所述障碍物包括钢丝绳末端捆扎机构上已捆扎处理的塔吊作业工件。
18、作为本发明的一个技术方案,所述步骤s400中预判断群塔作业中起重臂与钢丝绳是否可能发生碰撞,包括:
19、对相邻塔吊的起重臂与钢丝绳之间可能发生碰撞的空间距离进行预设值a;
20、对相邻塔吊的钢丝绳与钢丝绳之间可能发生碰撞的空间距离进行预设值b;
21、对塔吊的起重臂和钢丝绳与障碍物之间可能发生碰撞的空间距离进行预设值c;
22、若计算出的相邻塔吊的起重臂与钢丝绳之间的空间距离小于所述预设值a时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行;
23、若计算出的相邻塔吊的钢丝绳与钢丝绳之间的空间距离小于所述预设值b时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行;
24、若计算出的塔吊的起重臂和钢丝绳与障碍物之间的空间距离小于所述预设值c时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行。
25、作为本发明的一个技术方案,所述标志物a与标志物b均为圆形单色可被计算机锁定,且与起重臂及步骤s300中获取的图片信息中其它物的颜色不一致,通过hough变换检测出标志物a的圆心特征点,以及获取标志物b的实时空间位移;
26、在检测出所述标志物a的圆心特征点后,包括:
27、根据塔吊起重臂在运转状态下的圆心特征点的位移变化,获取塔吊起重臂的形变位移;
28、根据所获取的塔吊起重臂的形变位移计算起重臂形变量,并判断起重臂是否应继续运转,若起重臂形变量大于出厂形变量最大参数,则停止运转起重臂;若起重臂形变量小于出厂形变量最大参数,则继续判断该形变量下继续运转起重臂是否会产生碰撞,若会产生碰撞则停止运转起重臂,反之,则起重臂继续正常运行;
29、在获取标志物b的实时空间位移后,包括:
30、根据塔吊钢丝绳随起重臂运行状态下的标志物b的空间位移,获取钢丝绳末端捆扎机构的实时空间位置;若相邻塔吊钢丝绳的捆扎机构之间空间距离存在碰撞可能,则停止运转起重臂,反之,则起重臂继续正常运行。
31、作为本发明的一个技术方案,所述若起重臂形变量小于出厂形变量最大参数,则继续判断该形变量下继续运转起重臂是否会产生碰撞,还包括:
32、获取起重臂发生形变位置的特征点;
33、根据所述步骤s100中识别出的起重臂正常状态下的特征信息,对所述形变位置的特征点进行匹对,查找于所述特征点对应的特征信息;
34、将所述起重臂形变量纳入所述查找到的特征信息,重新确定新的特征信息;
35、根据所确定的新的特征信息,获取起重臂实际相对空间位置,并判断该相对空间位置下,起重臂是否会发生碰撞。
36、作为本发明的一个技术方案,在获取塔吊起重臂的形变位移,并判断起重臂是否应继续运转后,还包括记录、存储并更新数据以形成历史数据库,用于起重臂在此时刻t之后发生相同或相似形变量时即时作出是否继续运行起重臂的判断。
37、作为本发明的一个技术方案,所述起重臂在此时刻t之后发生相同或相似形变量时即时作出是否继续运行起重臂的判断,包括:
38、实时获取起重臂当前运转状态下的形变量;
39、将起重臂当前运转状态下的形变量在历史数据库中进行遍历搜索,以查询相同或相似的形变量数据;若查询到历史数据库中存在与当前起重臂相同或相似的形变量数据,则继续查询历史数据库中该形变量数据产生时,起重臂是否存在停止运转,若存在,则直接停止当前运转状态下的起重臂;若历史数据库中该形变量数据产生后并在起重臂运转一段时间t0后发生碰撞,则判定起重臂当前运转状态下的形变量在运行t0时间段后也会发生碰撞,则停止当前运转状态下的起重臂,若历史数据库中该形变量数据产生后起重臂一直正常运转,则判定起重臂当前运转状态下的形变量继续运行也不会产生碰撞,则继续运行当前运转状态下的起重臂;
40、若未查询到历史数据库中存在与当前起重臂相同或相似的形变量数据,则更新历史数据库。
41、本发明第二方面提出了一种群塔作业防碰撞系统,包括:
42、训练模块,用于对群塔作业中相邻塔吊的起重臂以钢丝绳进行特征训练,以识别起重臂与钢丝绳的特征信息;
43、第一获取模块,用于获取相邻塔吊的起重臂与钢丝绳的空间位置信息;
44、第二获取模块,用于获取所述起重臂与钢丝绳周围的障碍物实时图片信息;
45、判断模块,根据所获取的起重臂与钢丝绳的特征信息、空间位置信息以及周围障碍物实时图片信息,获取相邻塔吊的起重臂与钢丝绳的相对空间位置信息,从而通过计算预判断群塔作业中起重臂与钢丝绳是否可能发生碰撞;
46、若判断结果为会发生碰撞时,起重臂停止运行并发出报警警示;
47、若判断结果为不会发生碰撞时,起重臂继续正常运行。
48、作为本发明的一个技术方案,本发明还包括:
49、阈值模块,用于对相邻塔吊的起重臂与钢丝绳之间可能发生碰撞的空间距离进行预设值a;
50、对相邻塔吊的钢丝绳与钢丝绳之间可能发生碰撞的空间距离进行预设值b;
51、对塔吊的起重臂和钢丝绳与障碍物之间可能发生碰撞的空间距离进行预设值c;
52、若计算出的相邻塔吊的起重臂与钢丝绳之间的空间距离小于所述预设值a时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行;
53、若计算出的相邻塔吊的钢丝绳与钢丝绳之间的空间距离小于所述预设值b时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行;
54、若计算出的塔吊的起重臂和钢丝绳与障碍物之间的空间距离小于所述预设值c时,控制起重臂停止运行并发出报警警示;反之,起重臂继续正常运行;
55、标志模块,用于在起重臂的相机可视位置平行均匀贴附标志物a,以获取起重臂运转状态下的实时相对空间位置,在钢丝绳末端的捆扎机构上贴附标志物b,以获取钢丝绳随起重臂运转状态下的实际实时相对空间位置。
56、本发明的上述技术方案具有如下有益的技术效果:
57、本发明通过采用cnn对塔吊起重臂及钢丝绳进行特征训练获取起重臂与钢丝绳特征信息,结合空间测距获取起重臂与钢丝绳的空间位置,通过对空间距离的安全判断计算预判断群塔作业中起重臂是否可能发生碰撞;
58、本发明还利用了起重臂运转的历史数据,根据历史数据快速判断当前运转的起重臂是否存在碰撞风险。
- 还没有人留言评论。精彩留言会获得点赞!