一种摇臂式斗轮堆取料机自动堆料方法与流程
本发明涉及堆料领域,尤其涉及一种摇臂式斗轮堆取料机自动堆料方法。
背景技术:
1、目前在冶金、电力和建筑等行业中,采用摇臂式斗轮堆取料机进行物料堆取作业的原料场或煤场已经或正在升级设备和控制系统以实现堆取料机现场无人操作,采取了包括精确定位、激光扫描、防碰撞超声波雷达、视频监控等措施来实现堆取料机的远程控制,其中采取何种策略实现堆取料机自动完成堆取作业任务是有效提高远程控制自动化水平、作业效率和规范作业过程的重要环节。
2、通常所见的堆料方式如定点走行一次堆料、定点分层堆料、连续旋转堆料、旋转分层堆料、定点旋转走行堆料等仅指明一种堆料工艺过程,在堆取料机实际控制时通常仅适用于堆新料堆,而实际的生产过程中堆料、取料作业交替进行,料堆表面轮廓极其不规则,堆新料堆的作业占比非常小,而补堆时从何处开始、采用哪种堆料方式、如何自动控制成为亟待解决的问题。
技术实现思路
1、为了解决上述问题,本发明提出了一种摇臂式斗轮堆取料机自动堆料方法。
2、具体方案如下:
3、一种摇臂式斗轮堆取料机自动堆料方法,包括以下步骤:
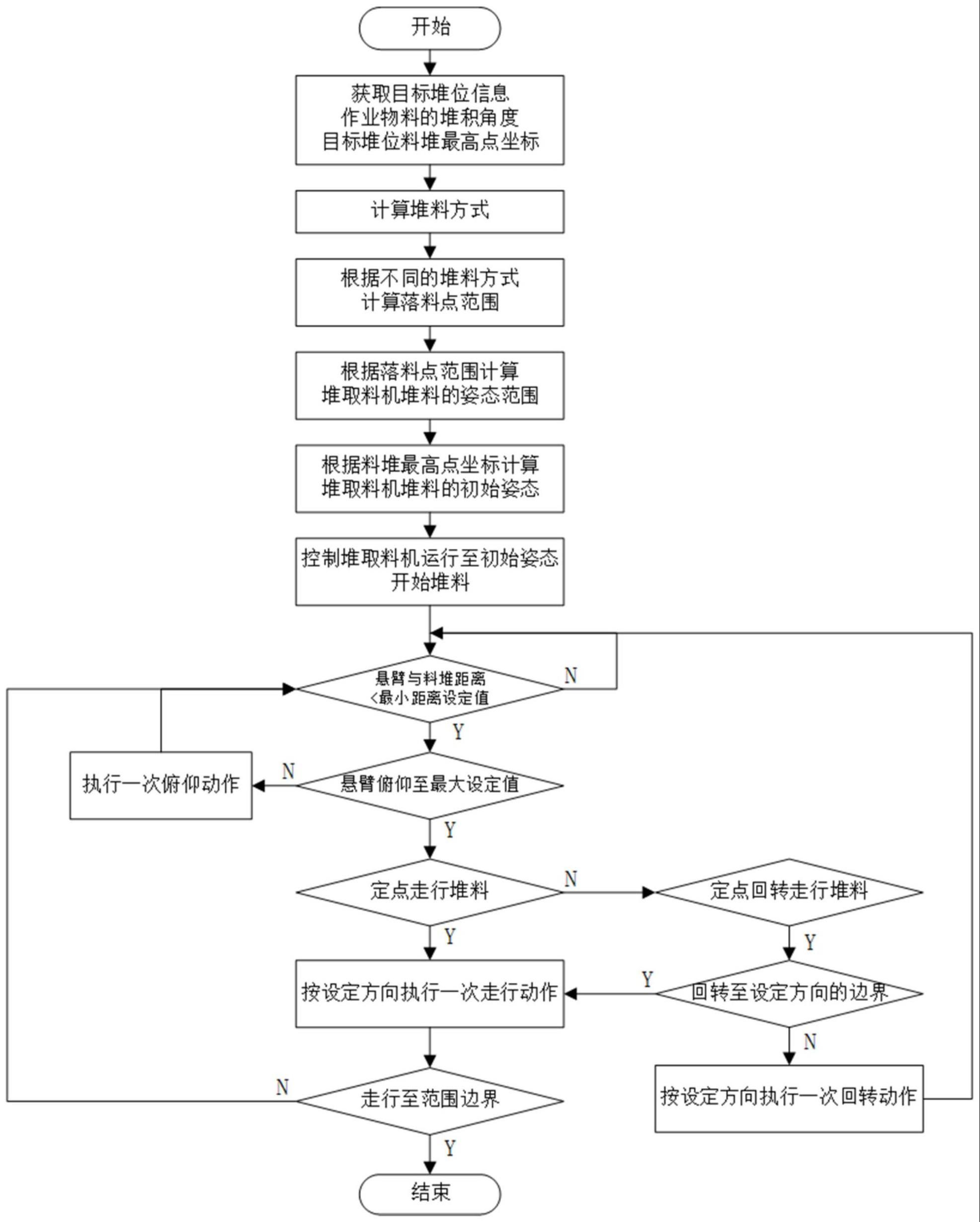
4、s1:获取目标堆位的位置信息;
5、s2:获取目标堆位对应的三维点云数据,并基于三维点云数据获取作业物料堆积角度θ和目标堆位对应的料堆最高点坐标;
6、s3:计算不受堆取料机悬臂俯仰高度限制的最大堆高zm及该最大堆高zm距离堆取料机的悬臂回转中心的距离ym:
7、
8、
9、其中,w表示目标堆位的宽度,hw表示料堆远离堆取料机侧的挡墙高度,l表示料堆靠近堆取料机侧与悬臂回转中心的距离;
10、s4:计算受堆取料机悬臂俯仰高度限制的最大堆高zlim:
11、zlim=l·sinβ′max+h0-h′min
12、其中,l表示悬臂回转中心距悬臂皮带落料端的长度,h0表示悬臂俯仰中心与料堆底面的垂直距离,β′max表示设定的悬臂最大俯仰角度,h′min表示设定的悬臂与料堆的最小垂直距离;
13、s5:根据zm与zlim的大小关系,选择堆料方式,并计算选择的堆料方式对应的落料点范围;
14、s6:根据落料点范围计算堆取料机堆料的姿态范围;
15、s7:根据堆料最高点坐标计算堆取料机堆料的初始姿态;
16、s8:控制堆取料机运行至初始姿态开始堆料;
17、s9:进行定点堆料,当悬臂与料堆的垂直距离h<h′min时,悬臂执行俯仰提升动作,当h≥h′min+h′s时停止悬臂俯仰动作,直到悬臂俯仰角β≥βmax;其中,h′s表示单次定点堆料高度,βmax表示悬臂俯仰角的最大值;
18、s10:当β≥βmax后,悬臂与料堆的垂直距离每满足h<h′min一次,执行一次走行动作或者回转动作,每次动作的停止条件均为h≥h′min+h′s。
19、进一步的,步骤s2中设定当堆新堆或点云数据异常造成所获角度不在物料堆积角度有效范围内时,物料堆积角度取该品种物料堆积角度的历史记录值,若无历史记录值则取最小有效值。
20、进一步的,步骤s5中堆料方式的选择方法为:当zm≤zlim时,堆料方式采用定点走行堆料;当zm>zlim,堆料方式采用定点回转走行堆料。
21、进一步的,采用定点走行方式堆料时,落料点范围([xmin,xmax],[ymin,ymax],[zmin,zmax])的计算公式为:
22、
23、
24、ymax=ymin=ym
25、zmax=zm
26、zmin=z0+min(h′s)
27、采取定点回转走行方式堆料时,落料点范围([xmin,xmax],[ymin,ymax],[zmin,zmax])的计算公式为:
28、
29、
30、ymax=ym+(zm-zlim)cotθ
31、ymin=ym-(zm-zlim)cotθ
32、zmax=zlim
33、zmin=z0+min(h′s)
34、其中,xmax、xmin分别表示落料点范围在x轴方向上的最大值和最小值,ymax、ymin分别表示落料点范围在y轴方向上的最大值和最小值,zmax、zmin分别表示落料点范围在z轴方向上的最大值和最小值,x1表示目标堆位在x轴方向上的起点位置,x2表示目标堆位在x轴方向上的终点位置,z0表示料堆最高点在z轴方向上的坐标,h表示悬臂与料堆的垂直距离,min(.)表示取最小值。
35、进一步的,堆取料机的姿态范围([xmin,xmax],[αmin,αmax],[βmin,βmax])的计算公式为:
36、βmin=sin-1((zmin+h′min-h0)/l)
37、βmax=sin-1((zmax+h′min-h0)/l)
38、αmin=sin-1(ymin/(l·cosβmax))
39、αmax=sin-1(ymax/(l·cosβmax))
40、xmin=xmin-l·cosβmax·cosα
41、xmin=xmax-l·cosβmax·cosα
42、其中,βmax、βmin分别表示悬臂俯仰角的最大值和最小值,αmax、αmin分别表示悬臂与x轴方向的夹角的最大值和最小值,xmax、xmin分别表示悬臂回转中心在x方向坐标的最大值和最小值。
43、进一步的,堆取料机初始堆料姿态(x0,α0,β0)的计算公式为:
44、β0=sin-1((zmin+h′min+h′s-h0)/l)
45、α0=sin-1(y0/(l·cosβ0))
46、x0=x0-l·cosβ0·cosα0
47、其中,x0表示悬臂回转中心在x方向坐标的初始坐标,α0表示悬臂与x轴方向的初始夹角,β0表示悬臂俯仰角的初始值,h′s表示单次定点堆料高度。
48、进一步的,步骤s8包括:当β0>βini时,先执行俯仰动作,俯仰到位后执行走行和回转动作;当β0≤βini时,先执行走行和回转动作,走行和回转均到位后执行俯仰动作,其中,β0表示悬臂俯仰角的初始值,βini表示悬臂俯仰角的当前值。
49、进一步的,若堆料方式为定点走行堆料,则按照设定的走行方向执行走行动作,直到x≥xmax或者x≤xmin;若堆料方式为定点回转走行堆料,则按照设定的初始回转方向执行回转动作,直到β≥βmax或者β≤βmin后,执行一次走行动作,并将回转动作方向自动设定为相反方向。
50、进一步的,还包括s11:对悬臂与料堆的垂直距离h进行检测,通过激光扫描系统进行检测的过程包括:通过激光扫描系统在堆取料机静止时实时获取包括悬臂落料点在内的点云数据;根据点云数据获取落料点高度和堆取料机的姿态,进而计算悬臂与料堆的垂直距离h。
51、进一步的,还包括s11:对悬臂与料堆的垂直距离h进行检测,通过测距雷达进行检测的过程包括:
52、当测距雷达安装在悬臂皮带右侧时,若悬臂向右转动或者悬臂在右侧堆取料机后退或者悬臂在左侧堆取料机前进,则通过下式计算悬臂与料堆的垂直距离h:
53、h=ht-l1·tanθ
54、其中,ht表示雷达检测距离,l1表示测距雷达与悬臂皮带落料点之间的水平距离;
55、若悬臂向左转动或者悬臂在右侧堆取料机前进或者悬臂在左侧堆取料机后退,则每次执行走行动作或者回转动作的条件由h<h′min改为dht>0,每次动作的停止条件由h≥h′min+h′s改为ht≥min(ht)+h′s,其中,min(ht)表示走行动作或者回转动作开始后测距雷达检测到的最小值,d(ht)表示ht的导数。
56、本发明采用如上技术方案,实现了堆取料机的自动化操作,可以从料堆最高点开始堆料,有效提高料场空间利用率;可以动判断堆料方式,避免每次堆料进行人工选择堆料方式或者人工选择不合适的堆料方式;能够动态计算在堆位允许范围内堆取料机堆料走行机构和悬臂动作范围,避免物料溢出或占用必要通道。
- 还没有人留言评论。精彩留言会获得点赞!