一种抛投轨迹拾取调控方法、设备及计算机可读存储介质与流程
本发明涉及无人驾驶航空器,尤其涉及一种抛投轨迹拾取调控方法、设备及计算机可读存储介质。
背景技术:
1、现有技术中,随着无人驾驶航空器技术的不断发展,空中物流业务已开始得到广泛地应用。特别地,针对物资上山的运输场景,目前的物流方案是,通过无人驾驶航空器携带物资飞行上山,在此期间,无人驾驶航空器需实时地提供飞行动力并进行姿态调整。可以看出,上述方案需消耗大量的电能资源和计算资源,在面对高山运输或多次运输需求时,物流效率较低。
2、因此,针对物资上山的运输场景,如何降低无人驾驶航空器单次运输的资源消耗,以此提升物流效率,成为目前亟待解决的技术问题。
技术实现思路
1、为了解决现有技术中的上述技术缺陷,本发明提出了一种抛投轨迹拾取调控方法,该方法包括:
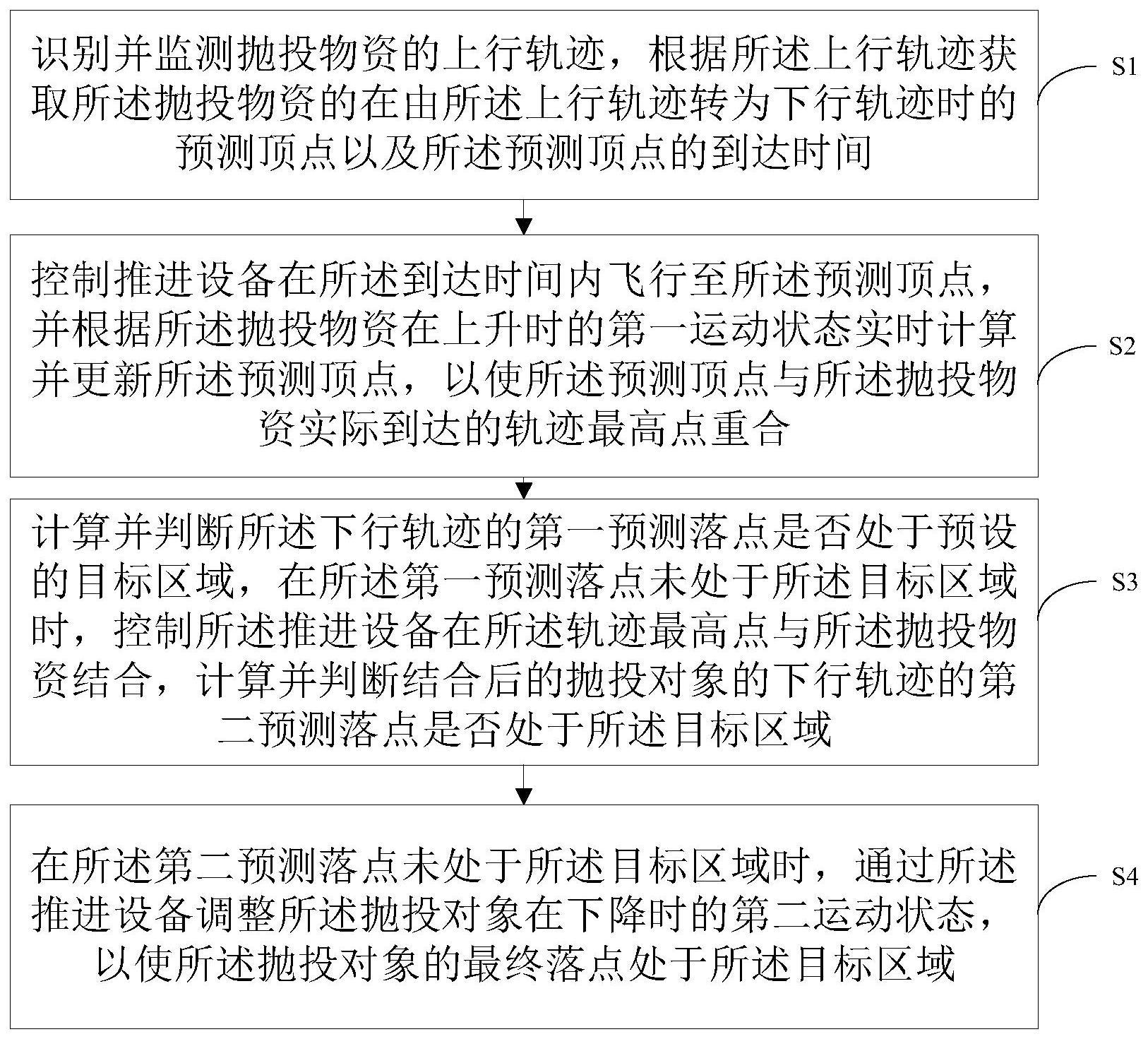
2、识别并监测抛投物资的上行轨迹,根据所述上行轨迹获取所述抛投物资的在由所述上行轨迹转为下行轨迹时的预测顶点以及所述预测顶点的到达时间;
3、控制推进设备在所述到达时间内飞行至所述预测顶点,并根据所述抛投物资在上升时的第一运动状态实时计算并更新所述预测顶点,以使所述预测顶点与所述抛投物资实际到达的轨迹最高点重合;
4、计算并判断所述下行轨迹的第一预测落点是否处于预设的目标区域,在所述第一预测落点未处于所述目标区域时,控制所述推进设备在所述轨迹最高点与所述抛投物资结合,计算并判断结合后的抛投对象的下行轨迹的第二预测落点是否处于所述目标区域;
5、在所述第二预测落点未处于所述目标区域时,通过所述推进设备调整所述抛投对象在下降时的第二运动状态,以使所述抛投对象的最终落点处于所述目标区域。
6、可选地,所述识别并监测抛投物资的上行轨迹,根据所述上行轨迹获取所述抛投物资的在由所述上行轨迹转为下行轨迹时的预测顶点以及所述预测顶点的到达时间,包括:
7、通过地面的测量设备或者抛投物资上的传感设备识别并监测所述抛投物资的所述上行轨迹;
8、通过与所述测量设备或所述传感设备相连的通信设备将所述预测顶点和达到时间发送至所述推进设备。
9、可选地,所述控制推进设备在所述到达时间内飞行至所述预测顶点,并根据所述抛投物资在上升时的第一运动状态实时计算并更新所述预测顶点,以使所述预测顶点与所述抛投物资实际到达的轨迹最高点重合,包括:
10、根据所述第一运动状态包含的垂直运动分量计算所述抛投物资实际到达所述轨迹最高点的到达时刻;
11、根据所述到达时刻以及所述第一运动状态包含的水平运动分量计算并更新所述预测顶点,以使所述预测顶点与所述轨迹最高点重合。
12、可选地,所述计算并判断所述下行轨迹的第一预测落点是否处于预设的目标区域,在所述第一预测落点未处于所述目标区域时,控制所述推进设备在所述轨迹最高点与所述抛投物资结合,计算并判断结合后的抛投对象的下行轨迹的第二预测落点是否处于所述目标区域,包括:
13、在所述轨迹最高点计算并判断所述第一预测落点是否处于所述目标区域;
14、若所述第一预测落点处于所述目标区域,则控制所述推进设备飞行至其它抛投物资的预测顶点,若所述第一预测落点未处于所述目标区域,则控制所述推进设备在所述轨迹最高点拾取所述抛投物资,并与所述抛投物资结合。
15、可选地,所述在所述第二预测落点未处于所述目标区域时,通过所述推进设备调整所述抛投对象在下降时的第二运动状态,以使所述抛投对象的最终落点处于所述目标区域,包括:
16、在通过所述推进设备调整所述抛投对象在下降时的第二运动状态时,计算所述抛投对象的预测落点是否处于所述目标区域;
17、在确定所述预测落点处于所述目标区域时,控制所述推进设备停止推进调整并释放所述抛投物资。
18、本发明还提出了一种抛投轨迹拾取调控设备,该设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现:
19、识别并监测抛投物资的上行轨迹,根据所述上行轨迹获取所述抛投物资的在由所述上行轨迹转为下行轨迹时的预测顶点以及所述预测顶点的到达时间;
20、控制推进设备在所述到达时间内飞行至所述预测顶点,并根据所述抛投物资在上升时的第一运动状态实时计算并更新所述预测顶点,以使所述预测顶点与所述抛投物资实际到达的轨迹最高点重合;
21、计算并判断所述下行轨迹的第一预测落点是否处于预设的目标区域,在所述第一预测落点未处于所述目标区域时,控制所述推进设备在所述轨迹最高点与所述抛投物资结合,计算并判断结合后的抛投对象的下行轨迹的第二预测落点是否处于所述目标区域;
22、在所述第二预测落点未处于所述目标区域时,通过所述推进设备调整所述抛投对象在下降时的第二运动状态,以使所述抛投对象的最终落点处于所述目标区域。
23、可选地,所述计算机程序被所述处理器执行时实现:
24、通过地面的测量设备或者抛投物资上的传感设备识别并监测所述抛投物资的所述上行轨迹;
25、通过与所述测量设备或所述传感设备相连的通信设备将所述预测顶点和达到时间发送至所述推进设备。
26、可选地,所述计算机程序被所述处理器执行时实现:
27、根据所述第一运动状态包含的垂直运动分量计算所述抛投物资实际到达所述轨迹最高点的到达时刻;
28、根据所述到达时刻以及所述第一运动状态包含的水平运动分量计算并更新所述预测顶点,以使所述预测顶点与所述轨迹最高点重合。
29、可选地,所述计算机程序被所述处理器执行时实现:
30、在所述轨迹最高点计算并判断所述第一预测落点是否处于所述目标区域;
31、若所述第一预测落点处于所述目标区域,则控制所述推进设备飞行至其它抛投物资的预测顶点,若所述第一预测落点未处于所述目标区域,则控制所述推进设备在所述轨迹最高点拾取所述抛投物资,并与所述抛投物资结合;
32、在通过所述推进设备调整所述抛投对象在下降时的第二运动状态时,计算所述抛投对象的预测落点是否处于所述目标区域;
33、在确定所述预测落点处于所述目标区域时,控制所述推进设备停止推进调整并释放所述抛投物资。
34、本发明还提出了一种计算机可读存储介质,该计算机可读存储介质上存储有抛投轨迹拾取调控程序,抛投轨迹拾取调控程序被处理器执行时实现如上述任一项所述的抛投轨迹拾取调控方法的步骤。
35、实施本发明的抛投轨迹拾取调控方法、设备及计算机可读存储介质,通过识别并监测抛投物资的上行轨迹,根据所述上行轨迹获取所述抛投物资的在由所述上行轨迹转为下行轨迹时的预测顶点以及所述预测顶点的到达时间;控制推进设备在所述到达时间内飞行至所述预测顶点,并根据所述抛投物资在上升时的第一运动状态实时计算并更新所述预测顶点,以使所述预测顶点与所述抛投物资实际到达的轨迹最高点重合;计算并判断所述下行轨迹的第一预测落点是否处于预设的目标区域,在所述第一预测落点未处于所述目标区域时,控制所述推进设备在所述轨迹最高点与所述抛投物资结合,计算并判断结合后的抛投对象的下行轨迹的第二预测落点是否处于所述目标区域;在所述第二预测落点未处于所述目标区域时,通过所述推进设备调整所述抛投对象在下降时的第二运动状态,以使所述抛投对象的最终落点处于所述目标区域。本发明实现了一种空中拾取并进行抛投轨迹调控的物资上山方案,使得空中的推进设备可依次辅助多个抛投物资进行轨迹调整,提升了推进设备的利用率和整体的物流效率。
- 还没有人留言评论。精彩留言会获得点赞!