一种基于智能移动机器人的电石成品转运工艺的制作方法
本发明涉及电石炉冶炼领域,更具体地涉及一种基于智能移动机器人的电石成品转运工艺。
背景技术:
1、电石进入冷却区冷却一段时间后,通过吊具拔坨,将电石脱模,然后存放在冷却区继续冷却,冷却充分后变为成品电石,通过人工链子捆绑用天车装车或者装载机铲斗进行装车,进行转运,转运至破碎车间内存放。破碎时,通过人工操作装载机将大块电石进行一级破碎,满足二级破碎装置喂料要求尺寸后,人工操作装载机铲斗,将一级破碎后的电石送入输送机内,输送喂入二级破碎装置,完成电石二级破碎,其工艺过程参与人员多,劳动强度大,工作效率低。
2、公告号为cn215160414u的实用新型专利公开了一种电石转运系统,其包括相互平行设置的两个电石转运单元,各电石转运单元包括:行车,行车具有吊钩,吊钩上挂接有电石夹吊装置;放置在行车下一侧的电石锅;放置在行车下中部的用于将电石锅内的电石坨与其分离的分离装置;设置在行车下另一侧的输送装置,输送装置垂直于行车设置;设置在输送装置的出料端前方的提升装置;设置在提升装置的出料端下方的下料漏斗;以及设置在下料漏斗下的破碎机。其可通过行车与分离装置的配合,将电石坨与电石锅分离。然后,将电石坨粉碎,其虽然可以提高效率,但是仍然需要众多的工作人员参与,人力成本高。
技术实现思路
1、为解决现有技术中的上述技术问题,本发明提供一种基于智能移动机器人的电石成品转运工艺。
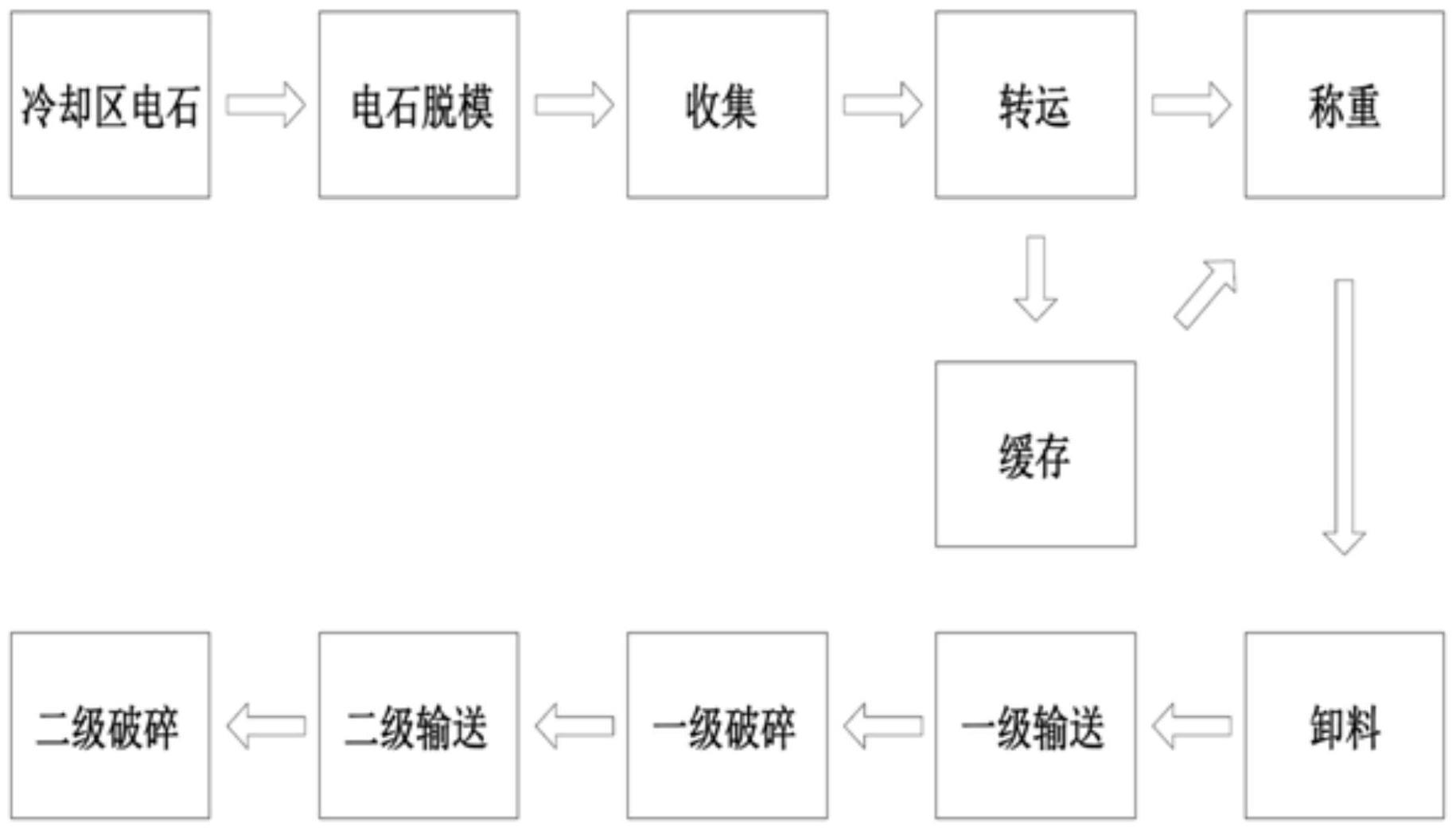
2、本发明采用的具体方案为:一种基于智能移动机器人的电石成品转运工艺,包括如下步骤:
3、(1)电石脱模:将冷却后的电石锅从冷却区吊运,并进行翻转脱模;
4、(2)收集:脱模后的电石采用收集容器进行收集;
5、(3)转运:将装满电石的收集容器通过移动机器人送至指定区域;
6、(4)称重:对收集容器内的电石进行称重;
7、(5)卸料:将称重后收集容器内的电石卸料到指定位置;
8、(6)一级输送:卸料后的电石通过输送机进入一级破碎喂料口;
9、(7)一级破碎:一级输送来料通过一级破碎后,整块或大块电石破碎成设定尺寸;
10、(8)二级输送:一级破碎后的电石块通过二级输送机进入二级破碎喂料口;
11、(9)二级破碎:二级输送来料进行二级破碎后,电石破碎成目标尺寸。
12、所述步骤(1)电石脱模前,电石在电石锅内冷却,冷却后的电石锅从冷却区搬运至收集容器上方、翻转电石锅,电石脱模落入收集容器内。
13、所述步骤(1)中智能无人天车系统将冷却后的电石锅从冷却区吊运,并进行翻转脱模。
14、所述步骤(3)由电石生产调度系统根据电石出库量及破碎区任务执行状态,规划移动机器人将成品电石转运至缓冲区或待破碎区。
15、所述移动机器人将成品电石从缓冲区运送至待破碎区。
16、所述步骤(4)待破碎区设有称重设备,可对收集容器内电石进行称重。
17、所述步骤(5)智能无人天车系统将成品电石料收集容器搬运至指定位置卸料点上方,翻转收集容器,卸料电石。
18、所述步骤(6)、步骤(8)中的输送机为变频调速输送机。
19、所述电石生产调度系统向智能无人天车系统发送待脱模电石锅的信息和收集容器的信息。
20、本发明相对于现有技术具有如下有益效果:
21、本发明公开了一种基于智能移动机器人的电石成品转运工艺,通过电石脱模、收集、转运、称重、卸料、一级输送、一级破碎、二级输送、二级破碎等步骤,实现成品电石从转运到破碎,从而提高生产效率,降低劳动强度。另一方面,本发明采用移动机器人实现电石的运输,避免了多余劳动力的投入,节约了成本。
技术特征:
1.一种基于智能移动机器人的电石成品转运工艺,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述步骤(1)电石脱模前,电石在电石锅内冷却,冷却后的电石锅从冷却区搬运至收集容器上方、翻转电石锅,电石脱模落入收集容器内。
3.根据权利要求1所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述步骤(1)中智能无人天车系统将冷却后的电石锅从冷却区吊运,并进行翻转脱模。
4.根据权利要求1所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述步骤(3)由电石生产调度系统根据电石出库量及破碎区任务执行状态,规划移动机器人将成品电石转运至缓冲区或待破碎区。
5.根据权利要求4所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述移动机器人将成品电石从缓冲区运送至待破碎区。
6.根据权利要求1所述的基于移动机器人的电石成品转运工艺方法,其特征在于:所述步骤(4)待破碎区设有称重设备,可对收集容器内电石进行称重。
7.根据权利要求1所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述步骤(5)中智能无人天车系统将成品电石料收集容器搬运至指定位置卸料点上方,翻转收集容器,卸料电石。
8.根据权利要求1所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述步骤(6)、步骤(8)中的输送机为变频调速输送机。
9.根据权利要求1、2、7所述的基于智能移动机器人的电石成品转运工艺,其特征在于,所述电石生产调度系统向智能无人天车系统发送待脱模电石锅的信息和收集容器的信息。
技术总结
本发明涉及电石炉冶炼领域,公开了一种基于智能移动机器人的电石成品转运工艺,包括如下步骤:将冷却后的电石锅从冷却区吊运并进行翻转脱模;脱模后的电石采用收集容器进行收集;转运:将装满电石的收集容器通过移动机器人送至指定区域;称重:对收集容器内的电石进行称重;卸料:将称重后收集容器内的电石卸料到指定位置;一级输送:卸料后的电石通过输送机进入一级破碎喂料口;一级破碎:一级输送来料通过一级破碎后,整块或大块电石破碎成设定尺寸;二级输送:一级破碎后的电石块通过二级输送机进入二级破碎喂料口;二级破碎:二级输送来料进行二级破碎后,电石破碎成目标尺寸。本发明解决了电石成品转运过程中需要投入大量的人力物力的问题。
技术研发人员:谭建勋,韩守国,宋建建,刘超,孙掖君,隋成友,汪立国,宋春波,刘义秋,刘罡,宋旭智,盛涛
受保护的技术使用者:哈尔滨博实自动化股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!