弯道双驱货叉式穿梭车电气控制系统的制作方法
本发明涉及穿梭车,具体涉及一种弯道双驱货叉式穿梭车电气控制系统。
背景技术:
1、目前,由于对仓库存储量的要求越来越高,尤其是自动化立体仓库,采用穿梭车拣选、输送以及出入库频率等要求也越来越高,货架穿梭车在智能仓储领域的应用越来越广泛。穿梭车行走于立体货架的轨道上,以将货架储位上的料箱搬运至穿梭车上,或将料箱搬运至储位上。而轮胎制造行业在仓库存储时,也应用了穿梭车进行成品的取放。
2、货笼盛放的轮胎产品通过输送到达穿梭车巷道口,通过穿梭车转运再分别到各个拣选出货口(固定货台),这样穿梭车就可以把输送设备上的货笼转放到不同固定货台上,然后进行拣选发货。
3、但是,实际操作中,工厂出货位置不在直线上,一般多有弯道,导致车轮容易打滑,而且穿梭车的速度一般以恒速运行,在经过弯道时容易打滑。为此,我们提出一种弯道双驱货叉式穿梭车电气控制系统来解决上述问题。
技术实现思路
1、解决的技术问题
2、针对现有技术的不足,本发明提供了一种弯道双驱货叉式穿梭车电气控制系统,在使用过程中,解决了穿梭车在多弯道行驶车轮容易打滑的问题。
3、技术方案
4、为了实现上述目的,本发明采用了如下技术方案:
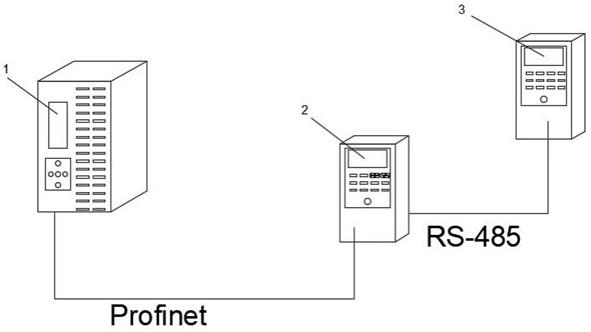
5、一种弯道双驱货叉式穿梭车电气控制系统,包括中央控制器、变频器主站、变频器从站和穿梭车本体,所述中央控制器与所述变频器主站电连接,所述变频器主站与所述变频器从站电连接;
6、还包括速度保护系统,所述速度保护系统用于控制所述穿梭车本体在轨道不同位置的速度。
7、在新一实施例中,所述穿梭车本体还包括两个第一行程开关、两个第二行程开关和两个端头开关,两个所述第一行程开关用于进行行程极限保护,两个所述第二行程开关用于进行弯道换速保护,两个所述端头开关用于端头换速保护。
8、在新一实施例中,所述穿梭车本体上还连接有检测框架,所述检测框架上连接有若干个光电传感器。
9、在新一实施例中,所述光电传感器的数量为12个。
10、在新一实施例中,所述穿梭车本体上还连接有货叉,所述货叉上还连接有若干个光电传感器。
11、在新一实施例中,所述光电传感器的数量为两个。
12、在新一实施例中,所述速度保护系统包括:
13、检测穿梭车本体位于轨道上的位置;
14、根据所述穿梭车本体的位置调节速度。
15、在新一实施例中,所述根据所述穿梭车本体的位置调节速度包括:
16、若穿梭车本体当前前进位置在a点前或d点后,控制所述穿梭车本体的实时速度小于第一速度;
17、若穿梭车本体当前前进位置在b点和c点之间,控制所述穿梭车本体的实时速度等于第二速度。
18、有益效果
19、与现有技术相比,本发明的有益效果是:
20、1、通过在轨道上设置多个点,穿梭车本体在经过不同的点时,控制其速度大小,从而保证穿梭车本体在直线轨道上快速行驶,在弯道上稳定行驶;
21、2、通过多个光电传感器的设置,可以准确识别货物的位置,以便快速取放,发生取放失误的次数大大降低。
技术特征:
1.一种弯道双驱货叉式穿梭车电气控制系统,其特征在于,包括中央控制器(1)、变频器主站(2)、变频器从站(3)和穿梭车本体,所述中央控制器(1)与所述变频器主站(2)电连接,所述变频器主站(2)与所述变频器从站(3)电连接;
2.如权利要求1所述的电气控制系统,其特征在于,所述穿梭车本体还包括两个第一行程开关、两个第二行程开关和两个端头开关,两个所述第一行程开关用于进行行程极限保护,两个所述第二行程开关用于进行弯道换速保护,两个所述端头开关用于端头换速保护。
3.如权利要求1所述的电气控制系统,其特征在于,所述穿梭车本体上还连接有检测框架,所述检测框架上连接有若干个光电传感器。
4.如权利要求3所述的电气控制系统,其特征在于,所述光电传感器的数量为12个。
5.如权利要求1所述的电气控制系统,其特征在于,所述穿梭车本体上还连接有货叉,所述货叉上还连接有若干个光电传感器。
6.如权利要求1所述的电气控制系统,其特征在于,所述光电传感器的数量为两个。
技术总结
本发明涉及穿梭车领域,提供一种弯道双驱货叉式穿梭车电气控制系统,包括中央控制器、变频器主站、变频器从站和穿梭车本体,所述中央控制器与所述变频器主站电连接,所述变频器主站与所述变频器从站电连接。在使用过程中,通过在轨道上设置多个点,穿梭车本体在经过不同的点时,控制其速度大小,从而保证穿梭车本体在直线轨道上快速行驶,在弯道上稳定行驶。
技术研发人员:施文杰,洪婷,金乔旭,伍兴国
受保护的技术使用者:苏州穗柯智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!