高空作业车及其平衡控制方法与流程
本发明涉及工程机械,特别涉及一种高空作业车及其平衡控制方法。
背景技术:
1、高空作业车由于通过臂架、工作平台等上装机构的移动、旋转等方式移动至作业位置,其上装机构的重心一般会偏离上装机构的旋转中心轴一段距离,因此需要加装配重块进行平衡,以使得上装机构的重心与其旋转中心轴线的水平距离存在于安全范围内。
2、目前,有些配重块是以固定式固定在上装机构的转台上,其平衡力矩为常数,无法动态调节,并且,受限于配重块的质量、尾扫半径等因素,力矩平衡能力有限,使得高空作业车容易发生侧翻,稳定性、可靠性较差。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种高空作业车的平衡控制方法,能够提高高空作业车的稳定性和可靠性。
2、根据本发明第一方面实施例的高空作业车的平衡控制方法,包括:
3、获取动力组件在驱动作业组件从所述作业组件的初始位置进行姿态调整后的参数变化,其中,所述动力组件在驱动所述作业组件从所述作业组件的初始位置进行姿态调整后,所述作业组件的重心能够在垂直于转台的旋转中心轴的方向上产生位移;
4、根据所述参数变化控制第一伸缩驱动件的伸缩量,以使配重达到平衡位置,从而使上装机构的稳定距小于预设值,其中,所述第一伸缩驱动件用于驱动所述配重在垂直于所述转台的旋转中心轴的方向上产生位移,所述配重的重心和所述作业组件的重心分别位于所述转台的旋转中心轴的两侧,所述第一伸缩驱动件的伸缩量为所述第一伸缩驱动件将所述配重从所述配重的初始位置驱动至所述平衡位置的过程中的伸缩量。
5、根据本发明实施例的高空作业车的平衡控制方法中,至少具有如下有益效果:
6、本发明的高空作业车的平衡控制方法中,第一伸缩驱动件能够根据动力组件的参数变化改变配重的重心与转台的旋转中心轴的水平距离,可以使得高空作业车达到平衡,实现动态调整的目的,能够降低高空作业车侧翻的风险,提高高空作业车的稳定性和可靠性。
7、根据本发明的一些实施例,在所述获取动力组件在驱动作业组件从所述作业组件的初始位置进行姿态调整后的参数变化之前,还包括:
8、预设作业组件的初始位置以及配重的初始位置。
9、根据本发明的一些实施例,所述预设作业组件的初始位置以及配重的初始位置包括:
10、预设所述作业组件的初始位置,并获取所述作业组件的重心的初始位置;预设所述配重的初始位置,并获取所述配重的重心的初始位置。
11、根据本发明的一些实施例,所述作业组件包括基本臂架,所述基本臂架的第一端与所述转台转动连接,所述动力组件包括用于调节所述基本臂架的俯仰角的第二伸缩驱动件;
12、所述参数变化包括所述第二伸缩驱动件的伸缩量。
13、根据本发明的一些实施例,所述作业组件还包括伸缩臂架,所述伸缩臂架可伸缩地穿设于所述基本臂架的第二端,所述动力组件还包括用于驱动所述伸缩臂架在所述基本臂架内伸缩的第三伸缩驱动件;
14、所述参数变化还包括所述第三伸缩驱动件的伸缩量。
15、根据本发明的一些实施例,所述动力组件还包括用于对所述作业组件的姿态进行调整、以改变所述作业组件的重心与所述转台的旋转中心轴的距离的其他伸缩驱动件;
16、所述参数变化还包括其他伸缩驱动件的伸缩量。
17、根据本发明的一些实施例,所述第一伸缩驱动件、所述第二伸缩驱动件和/或所述第三伸缩驱动件为油缸。
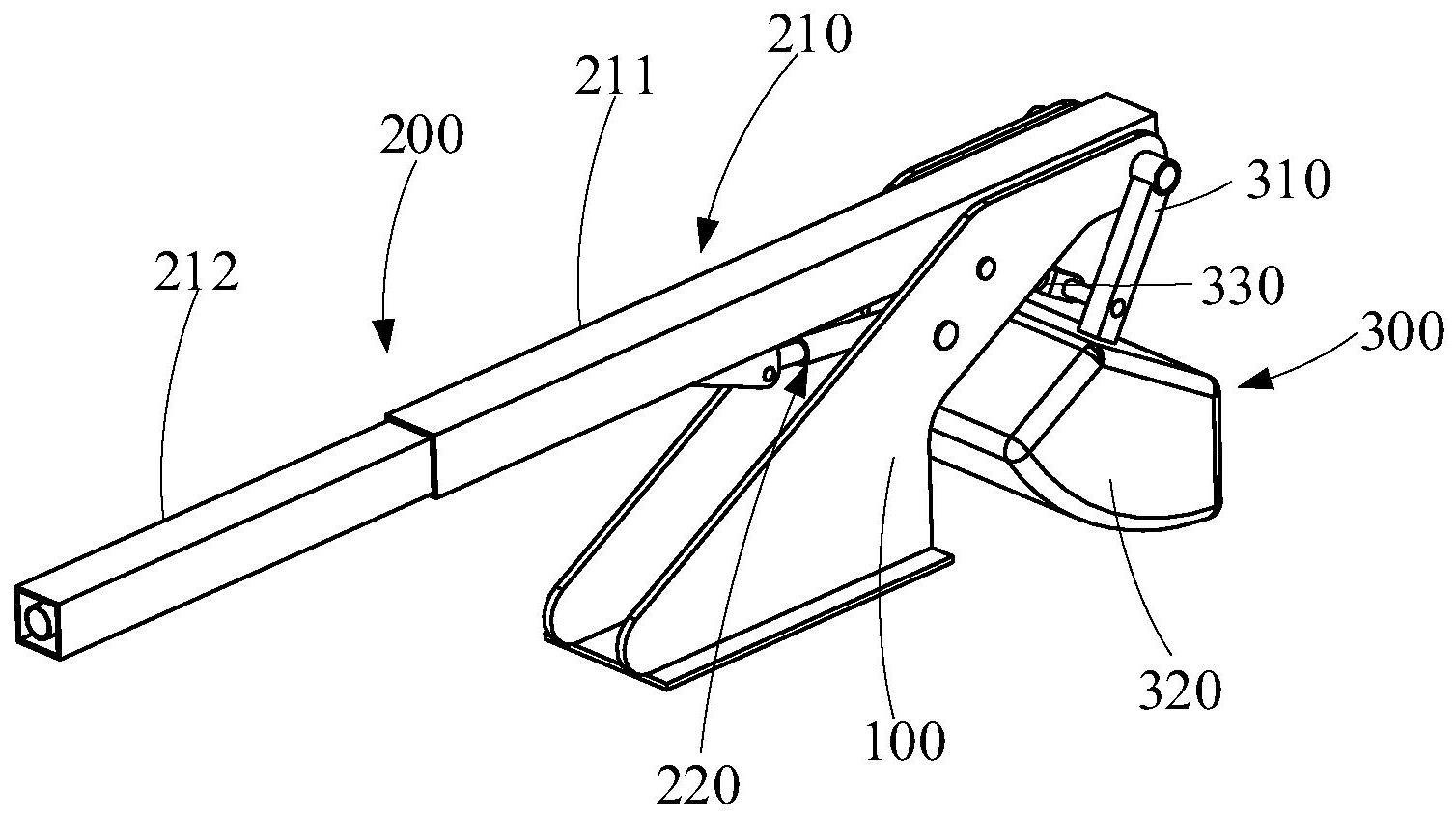
18、根据本发明的一些实施例,所述转台与一摆臂的第一端转动连接,所述摆臂的第二端与所述配重连接,所述第一伸缩驱动件的第一端与所述转台转动连接,所述第一伸缩驱动件的第二端与所述摆臂或者所述配重转动连接,所述第一伸缩驱动件用于驱动所述摆臂绕所述摆臂的第一端转动,以使所述配重在竖直平面摆动。
19、根据本发明的一些实施例,以所述摆臂在竖直状态时所述配重的位置为所述配重的初始位置,以所述摆臂与所述转台的铰接点o为坐标原点,p为所述第一伸缩驱动件在所述转台上的铰接点,a为所述第一伸缩驱动件在所述摆臂上的铰接点,a’为移动后所述第一伸缩驱动件在所述摆臂上的铰接点,则满足下式:
20、
21、其中,x为p点的横坐标,y为p点的纵坐标,l为所述摆臂的长度,k为所述配重的重心的横坐标与所述摆臂铰接点a’的横坐标之比。
22、根据本发明第二方面实施例的高空作业车,应用了如上所述的高空作业车的平衡控制方法。
23、根据本发明实施例的高空作业车,至少具有如下有益效果:
24、本发明的高空作业车中,第一伸缩驱动件能够根据动力组件的参数变化改变配重的重心与转台的旋转中心轴的水平距离,可以使得高空作业车达到平衡,实现动态调整的目的,能够降低高空作业车侧翻的风险,提高高空作业车的稳定性和可靠性。
25、根据本发明的一些实施例,所述参数变化至少包括所述第二伸缩驱动件的伸缩量,以及所述第三伸缩驱动件的伸缩量。
26、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种高空作业车的平衡控制方法,其特征在于,包括:
2.根据权利要求1所述的高空作业车的平衡控制方法,其特征在于,在所述获取动力组件在驱动作业组件从所述作业组件的初始位置进行姿态调整后的参数变化之前,还包括:
3.根据权利要求2所述的高空作业车的平衡控制方法,其特征在于,所述预设作业组件的初始位置以及配重的初始位置包括:
4.根据权利要求1所述的高空作业车的平衡控制方法,其特征在于,所述作业组件包括基本臂架,所述基本臂架的第一端与所述转台转动连接,所述动力组件包括用于调节所述基本臂架的俯仰角的第二伸缩驱动件;
5.根据权利要求4所述的高空作业车的平衡控制方法,其特征在于,所述作业组件还包括伸缩臂架,所述伸缩臂架可伸缩地穿设于所述基本臂架的第二端,所述动力组件还包括用于驱动所述伸缩臂架在所述基本臂架内伸缩的第三伸缩驱动件;
6.根据权利要求5所述的高空作业车的平衡控制方法,其特征在于,所述动力组件还包括用于对所述作业组件的姿态进行调整、以改变所述作业组件的重心与所述转台的旋转中心轴的距离的其他伸缩驱动件;
7.根据权利要求5所述的高空作业车的平衡控制方法,其特征在于,所述第一伸缩驱动件、所述第二伸缩驱动件和/或所述第三伸缩驱动件为油缸。
8.根据权利要求1所述的高空作业车的平衡控制方法,其特征在于,所述转台与一摆臂的第一端转动连接,所述摆臂的第二端与所述配重连接,所述第一伸缩驱动件的第一端与所述转台转动连接,所述第一伸缩驱动件的第二端与所述摆臂或者所述配重转动连接,所述第一伸缩驱动件用于驱动所述摆臂绕所述摆臂的第一端转动,以使所述配重在竖直平面摆动。
9.根据权利要求8所述的高空作业车的平衡控制方法,其特征在于,以所述摆臂在竖直状态时所述配重的位置为所述配重的初始位置,以所述摆臂与所述转台的铰接点o为坐标原点,p为所述第一伸缩驱动件在所述转台上的铰接点,a为所述第一伸缩驱动件在所述摆臂上的铰接点,a’为移动后所述第一伸缩驱动件在所述摆臂上的铰接点,则满足下式:
10.一种高空作业车,其特征在于,应用了如上权利要求1至9任一项所述的高空作业车的平衡控制方法。
技术总结
本发明公开了一种高空作业车及其平衡控制方法,高空作业车的平衡控制方法,包括:获取动力组件在驱动作业组件从作业组件的初始位置进行姿态调整后的参数变化,其中,动力组件在驱动作业组件从作业组件的初始位置进行姿态调整后,作业组件的重心能够在垂直于转台的旋转中心轴的方向上产生位移;根据参数变化控制第一伸缩驱动件的伸缩量,以使配重达到平衡位置,从而使上装机构的稳定距小于预设值,其中,第一伸缩驱动件用于驱动配重在垂直于转台的旋转中心轴的方向上产生位移,配重的重心和作业组件的重心分别位于转台的旋转中心轴的两侧,第一伸缩驱动件的伸缩量为第一伸缩驱动件将配重从配重的初始位置驱动至平衡位置的过程中的伸缩量。
技术研发人员:刘国良,李明,冯永前,郑继平,郑洪涛,谭昌胜
受保护的技术使用者:湖南星邦智能装备股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!