一种双机械臂式的码垛装置的制作方法
本发明属于码垛,具体为一种双机械臂式的码垛装置。
背景技术:
1、码垛是把物品整齐的堆叠好的意思,码垛基本可以分为三种方式,人工码垛,可适用于较轻的物体;叉车码垛,常用于仓库内;起重机码垛,常用于生产线上较重的物体,目前,随着自动化技术的快速发展,码垛机器人在工业流水线上已经得到了广泛的应用。
2、现阶段的码垛装置均为单个的机械臂对生产流水线末端的货物进行搬运,效率较为低下,并且,传统码垛机器人堆叠码垛时,具有下降机械臂、抓取货物、升高机械臂、旋转机械臂、下降机械臂、放下货物、升高机械臂和旋转机械臂八个机械动作,其动作较为复杂,影响了机器人堆叠码垛的效率,同时,传统码垛机器人下放货物距码垛存在较大距离,这不仅会对货物造成一定的损害,也可能会致使其码垛的坍塌,此外,传统码垛机器人堆叠码垛完成后,需等待叉车将已完成码垛进行搬离,码垛机器人才可以继续进行码垛,这一定程度上影响了工业流水线的生产效率。
技术实现思路
1、本发明的目的是为了解决上述中的问题,而提出的一种双机械臂式的码垛装置。
2、为了实现上述目的,本发明采用了如下技术方案:一种双机械臂式的码垛装置,包括输送设备;
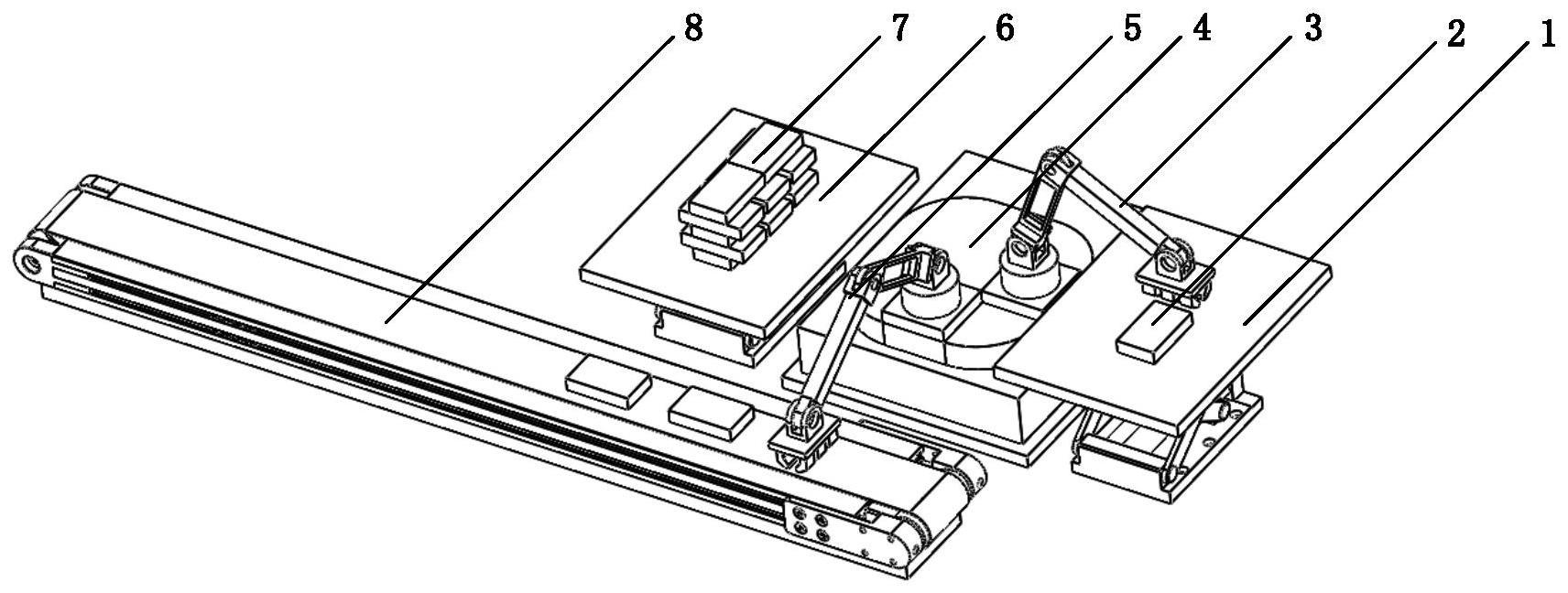
3、所述输送设备的侧部放置有第二升降设备,且第二升降设备的顶端放置有码垛,所述第二升降设备的侧部放置有第一旋转滑台,且第一旋转滑台的顶端分别安装有第一码垛机器人与第二码垛机器人,所述第一旋转滑台的另一侧放置有第一升降设备,且第一升降设备的顶端放置有货物。
4、优选的,所述第一码垛机器人与第二码垛机器人呈90°安装在第一旋转滑台的顶端。
5、优选的,述第一旋转滑台安装在输送设备的后方,所述第一升降设备与第二升降设备安装在第一旋转滑台的两侧。
6、综上所述,由于采用了上述技术方案,本发明的有益效果是:
7、1、本发明中,利用两个码垛机器人交错码垛货物,避免码垛堆叠完成后,码垛机器人等待码垛搬离的时间,有效的提高了码垛装置的工作效率。
8、2、本发明中,利用升降设备代替原码垛机器人下放货物前的下降机械臂和下放货物后的升高机械臂,实现将码垛机器人原来的8个机械动作减少成6个,有效的提高了码垛装置的工作效率。
9、3、本发明中,升降设备能够精准确定的升降高度,减小机器人下放的货物与码垛的距离,进而减轻机器人在下放货物时对货物的损害。
技术特征:
1.一种双机械臂式的码垛装置,包括输送设备(8),其特征在于;
2.根据权利要求1所述的一种双机械臂式的码垛装置,其特征在于:所述第一码垛机器人(3)与第二码垛机器人(5)呈90°安装在第一旋转滑台(4)的顶端。
3.根据权利要求1所述的一种双机械臂式的码垛装置,其特征在于:所述第一旋转滑台(4)安装在输送设备(8)的后方,所述第一升降设备(1)与第二升降设备(6)安装在第一旋转滑台(4)的两侧。
技术总结
本发明公开一种双机械臂式的码垛装置,涉及码垛设备技术领域,包括输送设备;输送设备的侧部放置有第二升降设备,且第二升降设备的顶端放置有码垛,第二升降设备的侧部放置有第一旋转滑台,且第一旋转滑台的顶端分别安装有第一码垛机器人与第二码垛机器人,第一旋转滑台的另一侧放置有第一升降设备,且第一升降设备的顶端放置有货物。本发明中,利用两个码垛机器人交错码垛货物,避免码垛堆叠完成后,码垛机器人等待码垛搬离的时间,有效的提高了码垛装置的工作效率,利用升降设备代替原码垛机器人下放货物前的下降机械臂和下放货物后的升高机械臂,实现将码垛机器人原来的8个机械动作减少成6个,有效的提高了码垛装置的工作效率。
技术研发人员:王磊,周琪珀,陈胜,马启航
受保护的技术使用者:颖态智能技术(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!