原料胶带机异物自动清除系统的制作方法
本发明涉及异物清除,具体涉及一种原料胶带机异物自动清除系统。
背景技术:
1、在工业生产过程中,原料胶带机多运输粉末状原料,但在操作、运输等环节,粉末原料中经常引入木块、木棒、塑料瓶等异物,此类异物会导致设备损坏、产品质量不合格等问题,严重影响了生产效率,甚至还会造成生产事故,因此,设计自动识别、清除胶带机杂料系统,能够有效解决上述问题,但目前在工业领域,因皮带速度快,人工清除难度大、危险性高、劳动强度大,无法实现对异物的自动清除。
技术实现思路
1、本发明的目的在于,提出一种原料胶带机异物自动清除系统,其设置的高速摄像机,实时采集原料图像;异物清除装置,对原料中的异物进行实时清理。
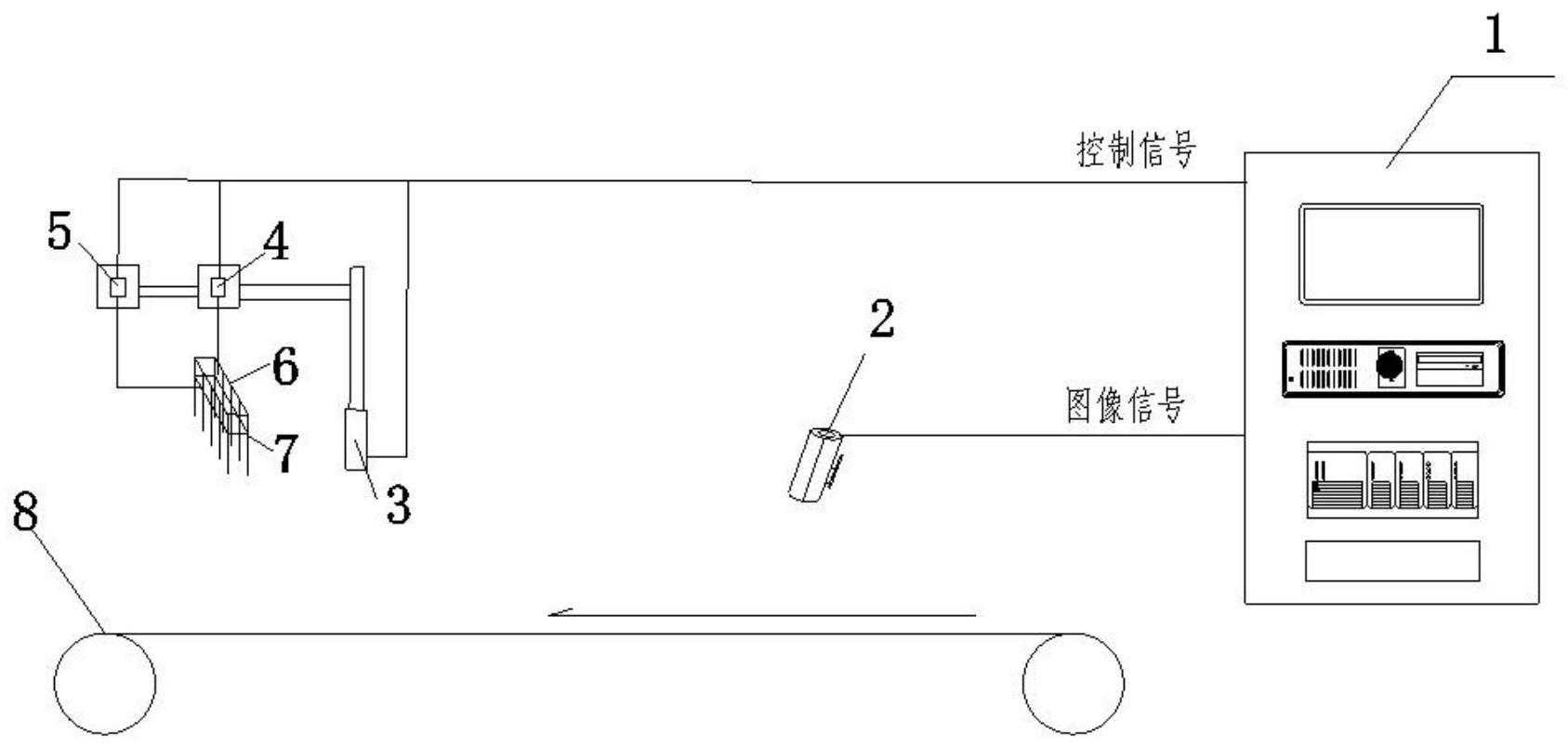
2、为实现上述目的,本申请提出一种原料胶带机异物自动清除系统,包括高速摄像机、控制终端、异物清除装置,所述高速摄像机、异物清除装置均与控制终端相连,高速摄像机实时采集原料图像后送至控制终端,该控制终端通过异物识别模型判断原料中是否含有异物,如果含有则向异物清除装置发出指令,将原料中的异物取出。
3、进一步的,所述控制终端与旋转电机相连,在旋转电机上面设有旋转杆,该旋转杆通过支架与异物清除装置相连。
4、进一步的,所述异物清除装置包括与控制终端相连的除杂电机、清理电机,所述除杂电机与除杂钉板相连,在除杂钉板上活动连接有清理板,该清理板通过连杆与清理电机相连。
5、进一步的,所述除杂电机安装在除杂固定板上,清理电机安装在清理固定板上,所述除杂固定板一侧与旋转杆连接,另一侧与清理固定板连接。
6、进一步的,所述异物清除装置还包括位于原料胶带机旁的垃圾筐,当除杂钉板向下运动取出异物后,控制终端向旋转电机发出指令使旋转杆转动,进而带动除杂固定板、清理固定板转动,使除杂钉板置于垃圾筐上方,然后控制终端向清理电机发出指令,清理电机带动清理板向下运动,刮下异物。
7、更进一步的,所述异物清除装置包括位于除杂固定板上的除杂电机,该除杂电机与除杂铲板相连,除杂铲板向下运动至原料胶带机出料端,由于含有异物的原料会继续向卸料方向运动,故异物会置于除杂铲板上,所述除杂铲板取出异物后,控制终端向旋转电机发出指令使旋转杆转动,进而带动除杂固定板转动,然后手动卸下异物。
8、更进一步的,所述控制终端采用python+opencv+yolov8图像处理中模式识别算法识别异物;使用色彩识别与深度学习结合算法,训练多张异物图像样本,构建异物识别模型,进而实现原料胶带机异物在线识别。
9、更进一步的,当异物识别模型检测到原料图像存在异物时,延时t秒下放除杂钉板或除杂铲板,所述t的获取方式为:
10、t=除杂钉板或除杂铲板与高速摄像机距离l/原料胶带机速度s-除杂钉板或除杂铲板下行时间t。
11、作为更进一步的,所述高速摄像机、异物清除装置均位于原料胶带机上方,且异物清除装置位于高速摄像机后面。
12、作为更进一步的,所述除杂钉板下落行程终点为原料胶带机皮带上方3-5cm,以防止扎伤皮带;除杂铲板下落行程终点为轻贴于原料胶带机皮带上面。
13、本发明采用的以上技术方案,与现有技术相比,具有的优点是:本发明控制终端的异物识别模型检测出存在异物时,异物清除装置实时动作,利用除杂钉板或除杂铲板将异物取出,实现杂物清除;能够减轻人力劳动,自动化程度高。
技术特征:
1.一种原料胶带机异物自动清除系统,其特征在于,包括高速摄像机、控制终端、异物清除装置,所述高速摄像机、异物清除装置均与控制终端相连,高速摄像机实时采集原料图像后送至控制终端,该控制终端通过异物识别模型判断原料中是否含有异物,如果含有则向异物清除装置发出指令,将原料中的异物取出。
2.根据权利要求1所述一种原料胶带机异物自动清除系统,其特征在于,所述控制终端与旋转电机相连,在旋转电机上面设有旋转杆,该旋转杆通过支架与异物清除装置相连。
3.根据权利要求2所述一种原料胶带机异物自动清除系统,其特征在于,所述异物清除装置包括与控制终端相连的除杂电机、清理电机,所述除杂电机与除杂钉板相连,在除杂钉板上活动连接有清理板,该清理板通过连杆与清理电机相连。
4.根据权利要求3所述一种原料胶带机异物自动清除系统,其特征在于,所述除杂电机安装在除杂固定板上,清理电机安装在清理固定板上,所述除杂固定板一侧与旋转杆连接,另一侧与清理固定板连接。
5.根据权利要求3所述一种原料胶带机异物自动清除系统,其特征在于,所述异物清除装置还包括位于原料胶带机旁的垃圾筐,当除杂钉板向下运动取出异物后,控制终端向旋转电机发出指令使旋转杆转动,进而带动除杂固定板、清理固定板转动,使除杂钉板置于垃圾筐上方,然后控制终端向清理电机发出指令,清理电机带动清理板向下运动,刮下异物。
6.根据权利要求2所述一种原料胶带机异物自动清除系统,其特征在于,所述异物清除装置包括位于除杂固定板上的除杂电机,该除杂电机与除杂铲板相连,除杂铲板向下运动至原料胶带机出料端,由于含有异物的原料会继续向卸料方向运动,故异物会置于除杂铲板上,所述除杂铲板取出异物后,控制终端向旋转电机发出指令使旋转杆转动,进而带动除杂固定板转动,然后手动卸下异物。
7.根据权利要求1所述一种原料胶带机异物自动清除系统,其特征在于,所述控制终端采用python+opencv+yolov8图像处理中模式识别算法识别异物;使用色彩识别与深度学习结合算法,训练多张异物图像样本,构建异物识别模型,进而实现原料胶带机异物在线识别。
8.根据权利要求7所述一种原料胶带机异物自动清除系统,其特征在于,当异物识别模型检测到原料图像存在异物时,延时t秒下放除杂钉板或除杂铲板,所述t的获取方式为:
9.根据权利要求1所述一种原料胶带机异物自动清除系统,其特征在于,所述高速摄像机、异物清除装置均位于原料胶带机上方,且异物清除装置位于高速摄像机后面。
10.根据权利要求1所述一种原料胶带机异物自动清除系统,其特征在于,所述除杂钉板下落行程终点为原料胶带机皮带上方3-5cm,除杂铲板下落行程终点为轻贴于原料胶带机皮带上面。
技术总结
本发明公开了一种原料胶带机异物自动清除系统,包括高速摄像机、控制终端、异物清除装置,所述高速摄像机、异物清除装置均与控制终端相连,高速摄像机实时采集原料图像后送至控制终端,该控制终端通过异物识别模型判断原料中是否含有异物,如果含有则向异物清除装置发出指令,将原料中的异物取出。所述控制终端与旋转电机相连,在旋转电机上面设有旋转杆,该旋转杆通过支架与异物清除装置相连。本发明控制终端的异物识别模型检测出存在异物时,异物清除装置实时动作,利用除杂钉板或除杂铲板将异物取出,实现杂物清除;能够减轻人力劳动,自动化程度高。
技术研发人员:张德锋,林立,张巍,高品,张吉琳
受保护的技术使用者:中冶北方(大连)工程技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!