一种海绵泡块移动方法与流程
本发明涉及海绵加工领域,特别涉及一种海绵泡块移动方法。
背景技术:
1、海绵厂制品生产过程中,会将很长的海绵泡剁成小海绵泡块来流转生产,在这个过程中,小海绵泡块需要一定的流转空间,因此实际生产中需要有小海绵块的存储。
2、目前存储方式很多,最常用的方法为以下两种:
3、第一种存储方式,利用堆垛移载车将海绵泡块送至立体仓储库中进行存储,但这种模式需要投资大体量仓储,首先需要建造例如专利cn205240466u中所提到的一种长距离海绵存储用立体货架来为实现海绵泡块的存储,其次还需要使用到例如专利cn209382806u中提到的一种长距离海绵泡移载提升搬运机,来实现海绵泡块的输送,整体对厂房承载要求高,而且安装调试周期长,投资较大,不利于标准化推广。
4、第二种存储方式,利用例如叉车、移动agv等移动载具来装载着海绵泡块进行移动,直接将海绵泡块堆叠放置在空地上,但出现的问题是在堆叠海绵泡块过程中,需要留有叉车或移动agv行走的空间,这样又浪费了有效的厂房空间。
技术实现思路
1、本发明要解决的技术问题是提供一种能够有效利用厂房空间、方便标准化推广的海绵泡块移动方法。
2、为解决上述技术问题,本发明的技术方案为:一种海绵泡块移动方法,其创新点在于:包括下述步骤
3、s1:首先,搭建专用的夹取系统,所述专用的夹取系统包括
4、夹绵机构,用于夹取小海绵泡块,所述夹绵机构包括夹绵支架以及安装在夹绵支架上的一对夹板,两个夹板由一水平机构驱动相互靠近或远离,在夹绵支架上安装有测力传感器,测力传感器在夹绵机构空载时的数值为f1,在夹板上安装有夹取力传感器;
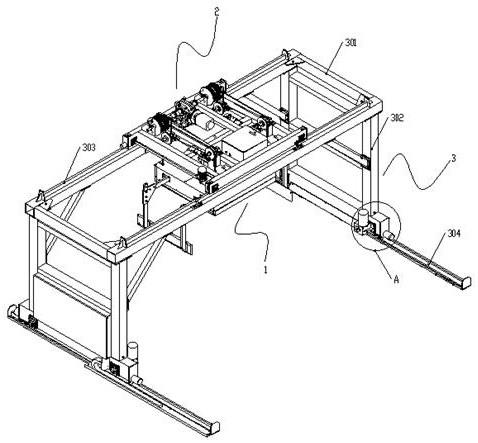
5、移动车,用于带动夹绵机构沿着水平方向进行水平移动,所述移动车包括一车架,夹绵机构安装在车架上,并由一升降机构驱动进行上下升降;
6、行车,用于带动移动车沿着水平方向进行水平移动,且行车的移动方向与移动车的移动方向相垂直,移动车设置在行车上,并在行车上进行水平移动;
7、限定移动车的水平移动方向为第一方向,行车的水平移动方向为第二方向,小海绵泡块的初始位置为第一位置,小海绵泡块的目的位置为第二位置;
8、s2:由行车与移动车的共同配合带动夹绵机构在第一方向与第二方向进行水平移动,直至夹绵机构移动至第一位置的上方,行车与移动车停止移动,并进入步骤s3;
9、s3:两个夹板打开到最大位置,由升降机构驱动夹绵机构下行,同时夹绵支架上的测力传感器实时检测,并将测力传感器所检测到的数值与设定的f1值进行比较,若测力传感器所检测到的数值达到设定值,则说明夹绵支架已下降到位,并进入步骤s4,若测力传感器所检测到的数值未达到设定值,则说明夹绵支架未下降到位,升降机构驱动夹绵机构继续下行,同时测力传感器持续检测;
10、s4:升降机构停止驱动,夹绵支架停止下行,由水平机构驱动两个夹板进行靠近,进行夹取小海绵泡块,同时,两个夹板上的夹取力传感器进行实时检测,并从夹取力传感器有数值时开始,每单位时间内记录测力数值,并分别记录为fn、f(n-1)、f(n+1)、f(n+2),其中,fn为当前时间的测力数值,f(n-1)为当前时间的前一单位时间的测力数值,f(n+1)为当前时间的后一个单位时间的测力数值,f(n+2)为当前时间的后两个单位的测力数值,利用[fn-f(n-1)]/[tn-t(n-1)],[f(n+1)-fn]/[t(n+1)-tn]分别得到两个计算数值,并分别将两个计算数值*k,k为系数,从而得到两个比较值,并将两个比较值进行比较,得到第一个差值,再利用[f(n+1)-fn]/[t(n+1)-tn],[f(n+2)-f(n+1)]/[t(n+2)-t(n+1)]得到两个计算数值,并分别将两个计算数值*k,从而得到两个比较值,并将两个比较值进行比较,得到第二个差值,将第一个差值与第二个差值进行比较,得到一个判定值,若该判定值在设定范围内,则说明在t(n+2)时间已夹取到位,进入步骤s5,若该判定值未达到设定范围,则说明未夹取到位,水平机构驱动两个夹板持续靠近,继续夹紧小海绵泡块,同时夹取力传感器持续进行检测;
11、s5:水平机构停止驱动,夹板停止移动,升降机构再次工作,拉动夹绵机构以及小海绵泡块上行至设定高度,然后,再由行车与移动车的共同配合带动夹绵机构在第一方向与第二方向进行水平移动,在移动的过程中,夹取力传感器保持实时检测,并将检测数值与f(n+2)进行比较,得到一个差值,若该差值在设定范围内,则说明夹板仍保持对小海绵泡块的夹紧,进入步骤s7,若该差值超出设定范围,则说明夹板与小海绵泡块之间出现松动,进入步骤s6;
12、s6:由水平机构驱动两个夹板进行靠近,夹紧小海绵泡块,同时夹取力传感器保持实时检测,并将检测数值与f(n+2)进行比较,得到一个差值,若该差值在设定范围内,则说明夹板已重新实现对小海绵泡块的夹紧,进入步骤s7,若该差值仍超出设定范围,这说明夹板还未实现对小海绵泡块的夹紧,水平机构驱动两个夹板继续夹紧小海绵泡块;
13、s7:夹绵机构在行车与移动车的带动下移动至第二位置的上方,行车与移动车停止移动,并进入步骤s8;
14、s8:由升降机构驱动夹绵机构下行,同时夹绵支架上的测力传感器实时检测,并将测力传感器所检测到的数值与f1值进行比较,若测力传感器所检测到的数值小于f1值,则说明小海绵泡已放置到位,并进入步骤s9,若测力传感器所检测到的数值不小于f1值,则说明小海绵泡未放置到位,升降机构驱动夹绵机构继续下行,并由测力传感器持续检测;
15、s9:升降机构停止驱动,夹绵机构停止下行,然后由水平机构驱动两个夹板相互远离,松开小海绵泡块,完成小海绵泡块的移动。
16、进一步的,所述夹绵机构包括沿着第一方向并列分布的一对夹板,两个夹板安装在一夹绵支架上,在夹绵支架上安装有测力传感器,在两个夹板相互相邻的一侧还均安装有一夹取力传感器;
17、所述水平机构包括安装在夹绵支架上一对活动座,两个活动座沿着第二方向分布在夹绵支架的两侧,所述活动座由一对沿着第一方向分布在夹绵支架两侧的活动板共同组成,在活动板的两侧分别安装有一对第一滚轮,同一对的两个第一滚轮呈上下位置分布在活动板上,在夹板的两侧分别连接有一连接板,所述连接板为由一水平板以及一竖直板成7字形连接而成的组合板,其中的竖直板直接与夹板相连,水平板位于夹板的上方,且水平板向两个夹板的中心方向延伸,水平板从同一对的两个第一滚轮之间穿过,在水平板的一侧还安装有第一齿条,第一齿条沿着第一方向延伸,在夹绵支架上安装有与第一齿条相配合的第一齿轮,所述第一齿轮由第一电机驱动进行转动;
18、所述移动车包括车架,在车架的底端安装有第二滚轮,其中一个第二滚轮由安装在车架上的电机驱动进行转动;
19、所述升降机构为:在车架上安装有一对沿着第一方向并列分布的卷筒,在卷筒上缠绕有两股升降钢丝绳,在车架上沿着第二方向并列安装有两个与升降钢丝绳相配合的定滑轮,所述升降钢丝绳一一绕过定滑轮后与夹绵支架相连,并拉动夹绵支架进行上下升降;
20、所述行车由一水平支架以及一对竖直支架共同连接而成的龙门架结构,在水平支架的两侧分别安装有一与第二滚轮相配合的第二导轨,第二导轨沿着第一方向延伸,在地面上安装一对第三导轨,第三导轨沿着第二方向延伸,在竖直支架的底端还安装有与第三导轨相配合的第三滚轮,其中一个第三滚轮由安装在竖直支架上电机驱动进行转动,并带动行车沿着第三导轨进行水平移动。
21、进一步的,两个第一齿轮之间连接有一联动轴。
22、进一步的,所述夹绵支架与车架之间还设置有导向机构,所述导向机构为:在夹绵支架上安装有一对导向柱,两个导向柱的分布方向与第一方向、第二方向之间均形成夹角,在车架上还安装有与两个导向柱一一对应的导向座,在导向座上开有容导向柱穿过并活动的导向通孔。
23、进一步的,所述导向柱的顶端还具有一圆锥导向段。
24、进一步的,所述导向座的旁侧还安装有一限位座,在限位座上安装有位于导向通孔上方的限位块。
25、进一步的,所述夹绵支架的外侧还套装有一保护罩壳。
26、本发明的优点在于:本发明的移动方法,基于专用的夹取系统,并配合测力传感器、夹取力传感器的实时检测,利用厂房向上的空间来实现小海绵泡块的自动移动,为后续实现小海绵泡块的自动堆叠提供了基础,而且这种方式可以将小海绵泡块直接堆叠在地面上,也就不必要在投资存储货架堆放海绵,而且也不需要留有叉车等移动工具的行走空间,降低企业的成本;本发明中的海绵泡块的移动方式,能够与各种厂房相配合进行使用,方便标准化推广。
27、升降机构的设计,采用两个卷筒以及四股升降钢丝绳的共同配合来实现夹绵机构的上下升降,使得夹绵机构能够稳定、顺畅的进行上下升降,相比于齿轮齿条传动或丝杠传动,不会出现卡顿的现象。
28、导向机构的设计,则是为了能够在移动车进行水平移动时,对夹绵机构与移动车之间的相对位置起到一个导向限位的作用,避免夹绵机构出现晃动的现象,而采用两个与第一方向、第二方向之间均形成夹角的导向柱来实现导向,采用这种分布方式,只需两个导向柱即可实现稳定的导向限位,减少所需的导向柱的数量。
- 还没有人留言评论。精彩留言会获得点赞!