机器人乘梯控制方法与流程
本发明涉及电梯领域,具体涉及一种机器人乘梯乘梯控制方法。
背景技术:
1、随着机器人的技术进步与应用范围的不断拓展,机器人被越来越广泛的应用在各种场景中。在这些应用场景中,常常需要机器人在不同楼层间移动以便实现其预定功能。目前机器人乘梯已经成为电梯领域中的一个研究和应用热点,但其关注焦点主要集中在机器人乘梯时与电梯的交互通信上,对于机器人在乘梯过程中因为诸如通信延迟等原因导致的机器人走失这一问题的研究成果相对较少。针对这一问题,已经出现了若干相关成果:
2、文献1(cn202110390407.x)公开的防止机器人走失的方法包括:接收电梯控制系统发送的电梯的状态信息;若检测到机器人未到达目的楼层且机器人位于电梯之外,则根据电梯的状态信息得到机器人当前所处的第一楼层,并向电梯控制系统发送前往目的楼层的指令,用于指示电梯控制系统控制电梯在到达第一楼层时停下,以使机器人乘坐电梯。
3、文献2(cn202111640681.4)提出:使用机器人自身携带的imu传感器,通过改进的积分测距模型来推测电梯的位移,同时考虑到积分测距模型的精度,将目标楼层分为直接可达楼层与不直接可达楼层,当目标楼层位于不直接可达楼层时,通过楼层分配模块给出的策略可以可靠的到达目标楼层,当出现乘梯异常导致的楼层位置丢失时,楼层重定位模块会给出一种策略让机器人重新找回正确的楼层位置。
4、文献3(cn202210765727.3)公开的机器人的乘梯控制方法包括:响应于接收到携带时间戳的电梯停靠目标楼层信息,将所述时间戳指示的时间信息与当前的实时时间信息进行比对,得到时间差;若所述时间差大于预设时间阈值,则判定电梯当前未停靠于目标楼层;发送呼梯指令,以使电梯基于所述呼梯指令再次停靠目标楼层。本技术可以判断电梯实际是否到达目标楼层,若否,则机器人暂时不执行出梯动作,从而可以避免机器人出错电梯的情况发生。
5、文献4(cn202210785348.0)公开的定位机器人出梯楼层的方法包括:获取机器人的出梯信息,出梯信息携带第一时间戳,第一时间戳用于指示机器人的出梯时间;获取电梯在不同楼层停靠的楼层信息,楼层信息携带第二时间戳,第二时间戳用于指示电梯向机器人发送楼层信息的时间;将第一时间戳分别与各楼层信息携带的第二时间戳进行比对,得到与第一时间戳的时间差在预设时间范围内的目标第二时间戳;将目标第二时间戳对应的楼层信息确定为机器人的出梯楼层。
6、文献1-3虽然能够避免机器人走失或在机器人走失后重新找回,但是都需要借助于额外的硬件设备,增加了成本;文献4则是依赖于额外的时间戳信息,增加了对于时间戳的产生和处理。
7、因此,如何在不增加硬件成本和额外信息去情况下避免机器人在乘梯过程中的走失问题就成为一个有待的技术问题。
技术实现思路
1、本发明要解决的技术问题是如何在不增加硬件成本和额外信息去情况下避免机器人在乘梯过程中的走失问题。
2、为了解决上述技术问题,本发明公开了一种机器人乘梯控制方法,包括如下步骤:
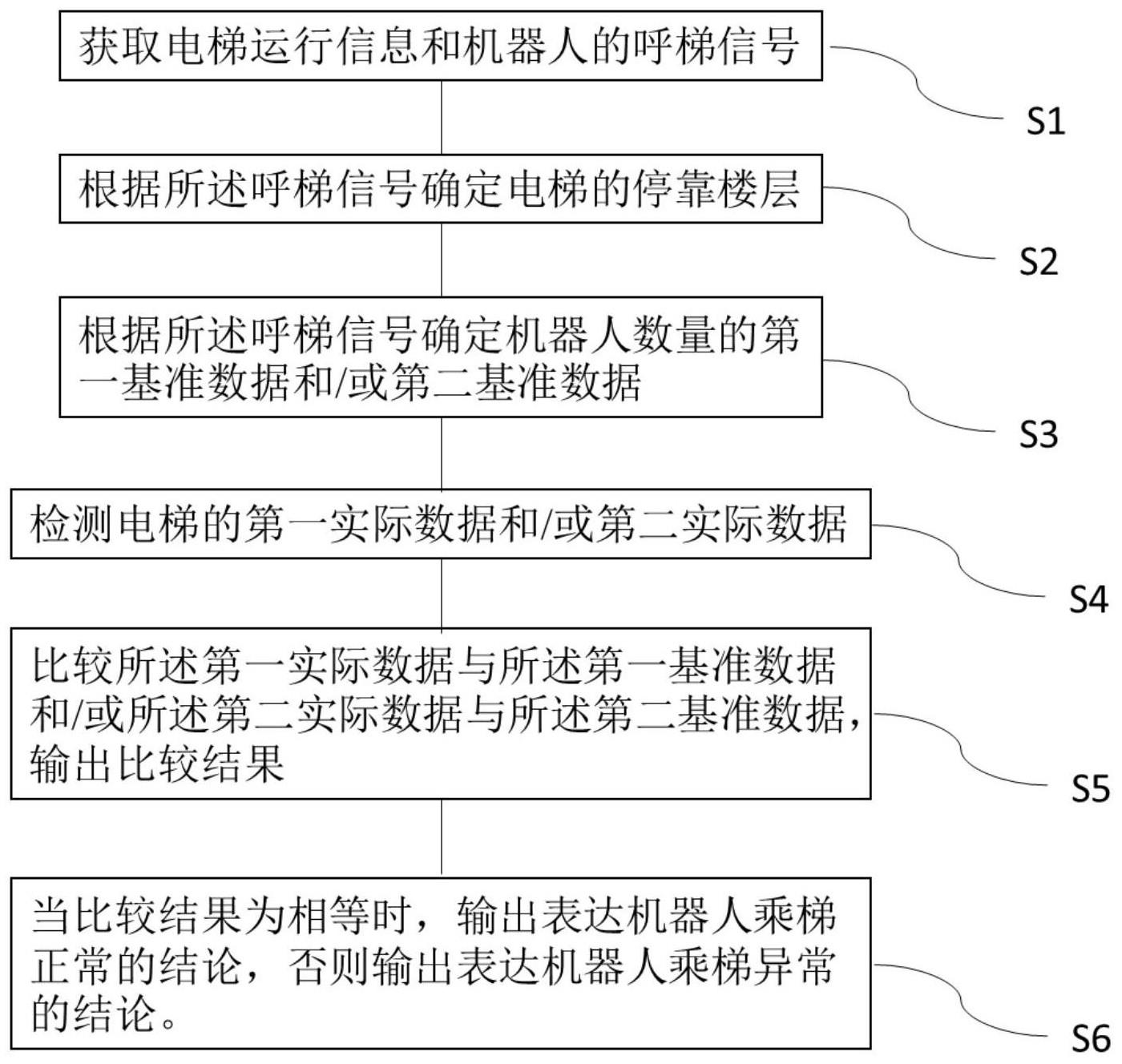
3、步骤s1、获取电梯运行信息和机器人的呼梯信号,所述呼梯信号至少包括机器人的出发楼层和目的楼层;
4、步骤s2、根据所述呼梯信号确定电梯的停靠楼层;
5、步骤s3、根据所述呼梯信号确定机器人数量的第一基准数据和/或第二基准数据,所述第一基准数是指电梯轿厢在所述停靠楼层停靠期间的机器人数量变化,所述第二基准数据是指电梯轿厢行进于相邻停靠楼层区间时的机器人数量;
6、步骤s4、检测电梯的第一实际数据和/或第二实际数据,所述第一实际数据是指电梯轿厢在停靠楼层停靠期间机器人乘入/离开轿厢数据,所述第二实际数据是指电梯轿厢内的机器人数量;
7、步骤s5、比较所述第一实际数据与所述第一基准数据和/或所述第二实际数据与所述第二基准数据,输出比较结果;
8、步骤s6、当比较结果为相等时,输出表达机器人乘梯正常的结论,否则输出表达机器人乘梯异常的结论。
9、优选地,所述步骤s2进一步包括:子步骤s2-1、从所有呼梯信号中筛选出分配给目标电梯的第一呼梯信号(仅当配有群控系统时);子步骤s2-2、根据所述第一呼梯信号的出发楼层和目的楼层确定其期望乘梯方向;子步骤s2-3、从所述第一呼梯信号中进一步筛选出期望乘梯方向与电梯运行方向一致的第二呼梯信号;子步骤s2-4、对所述第二呼梯信号的出发楼层和目的楼层执行合集运算,得到第一楼层集合;子步骤s2-5、从所述第一楼层集合中筛选出位于电梯轿厢所在位置相对于电梯运行方向的前方的第二楼层,并将其作为停靠楼层。
10、优选地,所述s3按照如下方式确定机器人数量的第一基准数据和/或第二基准数据:电梯在沿某一运行方向运行启动前,根据所述停靠楼层数据确定所述第一基准数据;和/或电梯在沿某一运行方向运行启动前,根据所述停靠楼层数据确定所述相邻停靠楼层区间以及与之对应的所述第二基准数据,且在电梯轿厢抵达本次运行的终点前仅在接收到新呼梯信号时才会根据更新后的所述停靠楼层再次确定所述第一基准数据和/或所述第二基准数据。
11、优选地,所述s3按照如下方式确定机器人数量的第一基准数据和/或第二基准数据:电梯在每次启动前,根据所述停靠楼层确定电梯运行前方距离当前所在停靠楼层最近的最近停靠楼层,并确定所述最近停靠楼层的所述第一基准数据;和/或电梯在每次启动前,根据所述停靠楼层确定距离当前所在停靠楼层最近的最近停靠楼层以及由当前所在停靠楼层和所述最近停靠楼层构成的最近相邻停靠楼层区间,并根据所述呼梯信号确定电梯轿厢处于所述最近相邻停靠楼层区间期间的所述第二实际数据。
12、优选地,所述步骤s3按照如下步骤得到所述第一基准数据:子步骤s3-a1、统计以某个停靠楼层为出发楼层的呼梯信号数量并将其作为在该停靠楼层乘入轿厢的机器人数量;子步骤s3-a2、统计以某个停靠楼层为目的楼层的呼梯信号数量并将其作为在该停靠楼层离开轿厢的机器人数量;子步骤s3-a3、计算对应于同一停靠楼层的乘入轿厢的机器人数量与离开轿厢的机器人数量的差值,并将该差值作为电梯在该停靠楼层停靠期间的机器人数量变化。
13、优选地,所述步骤s3在电梯在沿某一运行方向运行启动前按照如下步骤得到所述第二基准数据:子步骤s3-b1、根据所述停靠楼层确定各个相邻停靠楼层区间;子步骤s3-b2、将累计值设为0;子步骤s3-b3、从各个相邻停靠楼层区间中选择未被选择过且距离电梯轿厢当前所在楼层最近的相邻停靠楼层区间作为选定相邻停靠楼层区间;子步骤s3-b4、针对所述选定相邻停靠楼层区间,将构成该相邻停靠楼层区间的两个停靠楼层中距离电梯轿厢当前所在楼层最近的停靠楼层作为第一停靠楼层;子步骤s3-b5、根据以所述第一停靠楼层为出发楼层或目的楼层的呼梯信号确定对应于所述第一停靠楼层的所述第一基准数据;子步骤s3-b6、计算所述累计值与对应于所述第一停靠楼层的所述第一基准数据的和并将其作为对应于所述选定相邻停靠楼层区间的所述第二基准数据;子步骤s3-b7、判断是否仍有未被选择过的相邻停靠楼层区间,若是则将所述累计值更新为所述第二基准数据,返回子步骤s3-b3,否则结束。
14、优选地,所述步骤s3在电梯在每次启动前按照如下步骤得到所述第二基准数据:子步骤s3-c1、根据所述停靠楼层确定各个相邻停靠楼层区间;子步骤s3-c2、根据电梯轿厢当前所在楼层确定第一相邻停靠楼层区间和第二相邻停靠楼层区间,所述第一相邻停靠楼层区间是指电梯将要驶入的相邻停靠楼层区间,所述第二相邻停靠楼层区间与所述第一相邻停靠楼层区间相邻且电梯轿厢刚刚驶离或当前所在的相邻停靠楼层区间;子步骤s3-c3、将构成第一相邻停靠楼层区间的两个停靠楼层中距离电梯轿厢当前所在楼层最近的停靠楼层作为第一停靠楼层;子步骤s3-c4、根据以所述第一停靠楼层为出发楼层或目的楼层的呼梯信号确定对应于所述第一停靠楼层的所述第一基准数据;子步骤s3-c5、计算对应于所述第二相邻停靠楼层区间的所述二基准数据与对应于所述第一停靠楼层的所述第一基准数据的和并将其作为所述第一停靠楼层的所述第二基准数据。
15、优选地,所述电梯配置有用于检测电梯轿厢内负载的负载检测装置;所述步骤s3根据电梯轿厢在停靠楼层停靠期间所述负载检测装置输出的检测结果来确定所述第一基准数据和所述第二基准数据。
16、优选地,所述步骤s3将停靠期间检测结果中增加幅度超过阈值的次数作为进入轿厢的机器人数量,将停靠期间检测结果中减小幅度超过阈值的次数作为进入轿厢的机器人数量。
17、优选地,所述机器人的质量m满足:m-δm≤m≤m+δm,n*δm远小于m,其中m为机器人的平均质量,δm为机器人质量相对于平均质量的最大偏差,n为电梯轿厢能同时运送的机器人的最大数量,所述负载检测装置将其检测到的轿厢内负载与机器人的平均质量m的商在四舍五入后得到的结果作为所述第二实际数据。
18、优选地,所述机器人乘梯控制方法在得到某个停靠楼层的第一实际数据和以该停靠楼层为端点的两个相邻停靠楼层区间的所述第二实际数据后,计算两个第二实际数据间的差,并根据该差是否与所述第一实际数据一致来实现对获得第一实际数据的检测装置与获得第二实际数据的检测装置的异常检测。
19、优选地,当对应于某个相邻停靠楼层区间的第二实际数据与第二基准数据一致但对应于该相邻停靠楼层区间的两个相邻停靠楼层的第一实际数据和第一基准数据不一致时,所述机器人乘梯控制方法判定用于检测第一实际数据的检测装置异常;当对应于某个停靠楼层的第一实际数据与第一基准数据一致但对应于以该停靠楼层为端点的两个相邻停靠楼层区间的第二实际数据和第二基准数据不一致时,所述机器人乘梯控制方法判定用于检测第二实际数据的检测装置异常。
20、优选地,当对应于某一停靠楼层的所述第一基准数据不为零时,如果以该停靠楼层为起点的区间的所述第二实际数据等于所述第二基准数据且所述第一实际数据不等于所述第一基准数据,则判定获得第二实际数据的检测装置异常。
21、优选地,当某一停靠楼层的所述第一实际数据与其第一基准数据的比较结果为不相等时,记录该停靠楼层,所述机器人乘梯控制方法控制电梯择机再次停靠记录的该停靠楼层;当所述第二实际数据与所述第二基准数比较结果为不相等时,根据确定沿电梯运行方向记录所述区间的两个终端中靠前的停靠楼层,所述机器人乘梯控制方法控制电梯择机再次停靠记录的停靠楼层。
22、有益技术效果
23、本发明通过分析得到机器人乘梯这一特定场景中能够获得所有机器人的呼梯信号中均包含有出发楼层和目的楼层这一特点,充分利用这一特点得到电梯在停靠楼层停靠期间轿厢内机器人数量变化与电梯处于移动状态时轿厢内的机器人数量间的关系,实现对机器人乘梯过程中走失的检测,并可以实现对用于检测机器人数量或其变化的检测装置的异常诊断。
- 还没有人留言评论。精彩留言会获得点赞!