一种智能循环夹手机构的制作方法
本发明涉及木工机械,具体来说涉及一种智能循环夹手机构。
背景技术:
1、随着科学技术的不断发展,目前板材加工工序都是采用自动化程度较高的六面钻、开料机等加工设备,高效准确的夹手动作是打孔效率的关键。
2、如专利cn111702452a,公开的一种智能化吊弦预配加工生产线的连接线夹循环上料单元,包括机架、连接线夹缓存单元和连接线夹上料单元,连接线夹缓存单元包括连接线夹振动盘、连接线夹出料通道、连接线夹上料气缸和连接线夹缓存模具;连接线夹上料单元包括六轴机器人和气动夹爪,六轴机器人的末端安装所述气动夹爪,所述气动夹爪包括夹持气缸及安装在所述夹持气缸上的两个夹爪,以用于将所述连接线夹缓存模具上的连接线夹夹持到上料位置。该发明通过构造连接线夹振动盘和连接线夹出料通道,将一个个连接线夹导向连接线夹缓存模具等待被抓取上料,为连接线夹上料单元自动、持续供应连接线夹提供了条件,代替了传统手工上料,具备高效、精准、自动化程度高等优点。
3、在实际操作过程中,现有的木工加工设备通常都是两夹手工作,需要来回动作进行打孔,效率降低,且两夹手换手动作时候长板定位点容易偏移,而且连线使用时候,需要一块板材加工后才能加工下一个板材,无法连续夹持。
4、可见,现有技术存在的上述问题,亟待改进。
技术实现思路
1、鉴于现有技术存在的上述问题,本发明的一方面目的在于提供一种智能循环夹手机构,以解决现有木工为两夹手工作,效率较低,且在换手动作时容易造成偏移等问题。
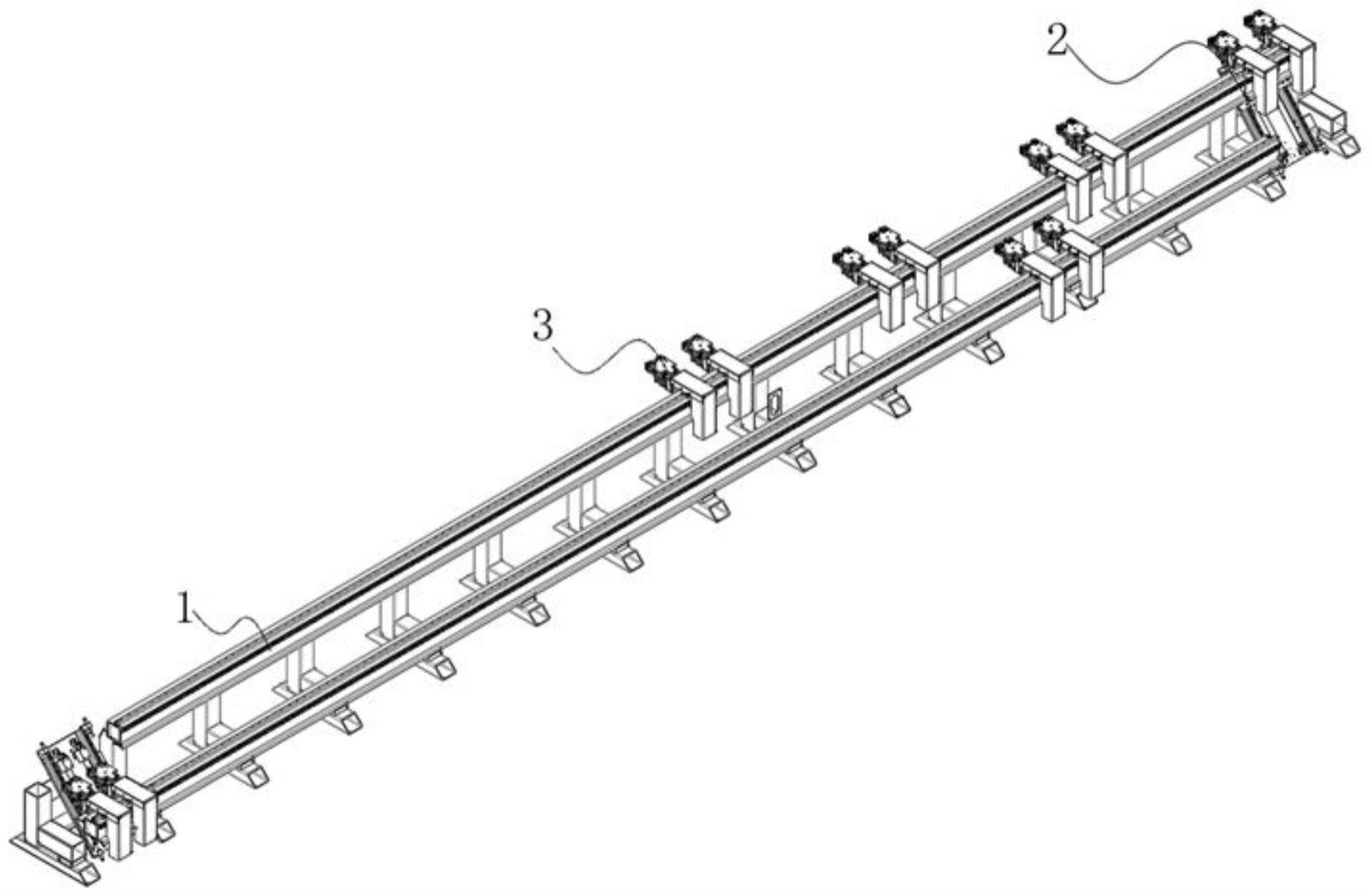
2、为了实现上述目的,本发明提供的一种智能循环夹手机构,包括呈斜线分布的导轨组件,两个所述导轨组件相对两侧端部对称设置有升降组件,所述升降组件的外壁均设置有可沿两个导轨组件之间保持往复滑动的移动导轨,以延伸于所述导轨组件两侧端部,两个导轨组件的外壁滑动设置有若干数量的夹手组件,所述夹手组件受驱沿导轨组件保持滑动可移动于移动导轨顶部,所述移动导轨受驱可沿两个所述导轨组件之间保持往复运动可驱使所述夹手组件位于两个所述导轨组件之间保持往复转移。
3、作为优选的,所述夹手组件包括上夹料座和下夹料座,所述上夹料座和下夹料座之间连接设置有轴承,所述上夹料座的底部设置有穿插于下夹料座的定位导杆。
4、作为优选的,所述上夹料座远离轴承的端部设置有第二导轨,所述第二导轨被装配用于驱使上夹料座保持竖直往复运动以驱使上夹料座和下夹料座之间保持开合。
5、通过上夹料座和下夹料座之间的轴承和之间穿插设置的定位导杆,以及第二导轨的配合,可使上夹料座和下夹料座之间进行开合。
6、作为优选的,所述第二导轨远离上夹料座的外壁卡接设置有连接板,所述连接板呈“l”型。
7、作为优选的,所述连接板的拐角处设置有斜齿轮,所述斜齿轮的底部连接设置有电机以驱使所述斜齿轮保持轴向转动,所述夹手组件的外壁罩射有夹手护罩。
8、作为优选的,所述升降组件具体包括夹手移动斜板,所述夹手移动斜板靠近夹手组件的外壁对称设置有气缸,所述气缸的外壁设置有转移机构。
9、作为优选的,所述转移机构具体包括设置于两个所述气缸两侧外壁对称的第一导轨,所述第一导轨的外壁设置有横梁板,所述横梁板的顶部固定设置有移动导轨,所述第一导轨相对两侧端部对称设置有限位调节块以限制所述移动导轨位于所述夹手移动斜板内的工位。
10、通过夹手移动斜板顶部可在两个导轨组件之间来回移动的横梁板顶部设置的移动导轨,可使夹手组件卡接于移动导轨上时,转移至另一个导轨组件的外壁,且通过移动导轨与导轨组件大小保持一致,使夹手组件在两个导轨组件上自由滑动进行转移。
11、作为优选的,所述移动导轨受驱沿两个导轨组件之间保持往复运动,且可保持精密贴合。
12、作为优选的,所述导轨组件包括横梁,所述横梁的外壁设置有齿条,所述横梁的顶部设置有滑轨,所述横梁的底部支撑设置有支柱,所述横梁远离滑轨的外壁贴合设置有电缆模组。
13、作为优选的,所述斜齿轮被装配用于与所述齿条保持啮合,以驱使所述夹手组件保持横向位移。
14、通过导轨组件外壁的齿条,可使夹手组件底部的斜齿轮进行啮合,从而驱动夹手组件进行横向移动,进行转移。
15、有益效果:
16、与现有技术相比,本发明提供的一种智能循环夹手机构,具备以下有益效果是:
17、通过夹手移动斜板顶部可在两个导轨组件之间来回移动的横梁板顶部设置的移动导轨,可使夹手组件卡接于移动导轨上时,转移至另一个导轨组件的外壁,且通过移动导轨与导轨组件大小保持一致,使夹手组件在两个导轨组件上自由滑动进行转移。
18、通过导轨组件外壁的齿条,可使夹手组件底部的斜齿轮进行啮合,从而驱动夹手组件进行横向移动,进行转移。
19、通过上夹料座和下夹料座之间的轴承和之间穿插设置的定位导杆,以及第二导轨的配合,可使上夹料座和下夹料座之间进行开合。
技术特征:
1.一种智能循环夹手机构,其特征在于,包括呈斜线分布的导轨组件(1),两个所述导轨组件(1)相对两侧端部对称设置有升降组件(2),所述升降组件(2)的外壁均设置有可沿两个导轨组件(1)之间保持往复滑动的移动导轨(205),以延伸于所述导轨组件(1)两侧端部,两个导轨组件(1)的外壁滑动设置有若干数量的夹手组件(3),所述夹手组件(3)受驱沿导轨组件(1)保持滑动可移动于移动导轨(205)顶部,所述移动导轨(205)受驱可沿两个所述导轨组件(1)之间保持往复运动可驱使所述夹手组件(3)位于两个所述导轨组件(1)之间保持往复转移。
2.根据权利要求1所述的一种智能循环夹手机构,其特征在于,所述夹手组件(3)包括上夹料座(302)和下夹料座(303),所述上夹料座(302)和下夹料座(303)之间连接设置有轴承(304),所述上夹料座(302)的底部设置有穿插于下夹料座(303)的定位导杆(306)。
3.根据权利要求2所述的一种智能循环夹手机构,其特征在于,所述上夹料座(302)远离轴承(304)的端部设置有第二导轨(305),所述第二导轨(305)被装配用于驱使上夹料座(302)保持竖直往复运动以驱使上夹料座(302)和下夹料座(303)之间保持开合。
4.根据权利要求3所述的一种智能循环夹手机构,其特征在于,所述第二导轨(305)远离上夹料座(302)的外壁卡接设置有连接板(307),所述连接板(307)呈“l”型。
5.根据权利要求4所述的一种智能循环夹手机构,其特征在于,所述连接板(307)的拐角处设置有斜齿轮(308),所述斜齿轮(308)的底部连接设置有电机(309)以驱使所述斜齿轮(308)保持轴向转动,所述夹手组件(3)的外壁罩射有夹手护罩(301)。
6.根据权利要求1所述的一种智能循环夹手机构,其特征在于,所述升降组件(2)具体包括夹手移动斜板(201),所述夹手移动斜板(201)靠近夹手组件(3)的外壁对称设置有气缸(202),所述气缸(202)的外壁设置有转移机构。
7.根据权利要求6所述的一种智能循环夹手机构,其特征在于,所述转移机构具体包括设置于两个所述气缸(202)两侧外壁对称的第一导轨(204),所述第一导轨(204)的外壁设置有横梁板(203),所述横梁板(203)的顶部固定设置有移动导轨(205),所述第一导轨(204)相对两侧端部对称设置有限位调节块(206)以限制所述移动导轨(205)位于所述夹手移动斜板(201)内的工位。
8.根据权利要求7所述的一种智能循环夹手机构,其特征在于,所述移动导轨(205)受驱沿两个导轨组件(1)之间保持往复运动,且可保持精密贴合。
9.根据权利要求5所述的一种智能循环夹手机构,其特征在于,所述导轨组件(1)包括横梁(101),所述横梁(101)的外壁设置有齿条(102),所述横梁(101)的顶部设置有滑轨(103),所述横梁(101)的底部支撑设置有支柱(104),所述横梁(101)远离滑轨(103)的外壁贴合设置有电缆模组(105)。
10.根据权利要求9所述的一种智能循环夹手机构,其特征在于,所述斜齿轮(308)被装配用于与所述齿条(102)保持啮合,以驱使所述夹手组件(3)保持横向位移。
技术总结
本发明涉及木工机械技术领域,具体公开了一种智能循环夹手机构,包括呈斜线分布的导轨组件,两个导轨组件相对两侧端部对称设置有升降组件,升降组件的外壁均设置有可沿两个导轨组件之间保持往复滑动的移动导轨,以延伸于导轨组件两侧端部,两个导轨组件的外壁滑动设置有若干数量的夹手组件,夹手组件受驱沿导轨组件保持滑动可移动于移动导轨顶部,移动导轨受驱可沿两个导轨组件之间保持往复运动可驱使夹手组件位于两个导轨组件之间保持往复转移。该发明提供的智能循环夹手机构通过夹手移动斜板顶部可在导轨组件之间来回移动的移动导轨,使夹手组件滑动至移动导轨上时可转移至另一个导轨组件上,使夹手组件在两个导轨组件上进行转移实现循环。
技术研发人员:刘敬盛,何国东,万艳
受保护的技术使用者:广东豪德数控装备股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!