一种适用于火车货运袋装物料的全自动装卸机的制作方法
本发明涉及自动化装载设备,特别涉及一种适用于火车货运袋装物料的全自动装卸机。
背景技术:
1、目前对于采用火车棚车(在铁路运输中,车厢上部设有能防晒、挡雨的顶棚,车厢中部两侧开门)运输的袋包货物的装卸方式主要是人工装卸,即通过大量的人力将袋包货物装卸到指定位置,这样工人的劳动强度大,工作环境恶劣,人工成本高,装卸效率低,另外一种是采用笨重的机械设备进行半人工装卸,所采用设备移动非常不方便,自动化和智能化程度低。
2、为了实现火车棚车的高效装卸,如专利申请cn108502555a中提供了一种火车专用的卡车式自动装卸机,包括卡车头和装卸机,装卸机与卡车头连接,装卸机由卡车头牵引,装卸机包括基台、滑移台、两个伸缩输送平台、两个转座和中间过渡皮带输送机,基台设置于卡车头的车体上,滑移台设置于基台上,两个伸缩输送平台、两个转座和中间过渡皮带输送机设置于滑移台上,两个转座分别设置于中间过渡皮带输送机两端,两个转座上均设有转台,转台上设有挡板,挡板用于将转台上货品挡入下一环节,两个伸缩输送平台分别设置于两个转座上,伸缩输送平台通过转座在滑移台上转动调节一定的角度。本发明结构轻巧,移动方便快捷,将货物搬上或搬下装卸机,无需负重移动,大大节省了人力,提高了装卸效率。专利申请cn205312568u提供了一种转盘过渡式双向装卸机,涉及物流运输货物装卸机械设备领域。由承载小车、两台皮带输送机、中间输送机、挡料装置及其操纵控制系统组成。本实用新型结构简单,工作可靠,经济实用,节能环保;行走时收拢,外形尺寸小,移动和转场方便快捷;工作时展开,作业范围大,可引导和改变物流方向,实现正反双向装卸;可调节皮带输送机工作方位和姿态,以适应货物装卸点变动,一次装卸,货物直达;可以直接进入车厢、货柜、集装箱内部作业,减少人工辅助搬运,减轻工人劳动强度,缩短作业时间,提高装卸工效,降低装卸搬运成本;装卸输送过程物品落差小,过渡平稳无冲击,可减少粉尘排放,改善工作环境,避免物品过渡输送跌落破损,保证货品装卸安全。上述两个专利均通过两个传动结构可转动配合的方式,实现输送带的便捷移动,适应货物装卸点变动。但是如上述两个专利提供的装卸机,实质上均为半自动的装卸设备,其物料的夹取以及装卸机的移动均是通过人工实现的,其仍要消耗大量的人力来进行装卸。
3、为了便于在码垛和卸车的过程中,便于物料的搬运,现有技术中通过会采用自动控制的机械手对物料进行夹取,现有的机械手通常采用吸盘的方式、抓手的方式或者另外类似于铲车的方式进行加持;如专利cn215158999 u中提供了一种用于装车机搬运物料的抓手机构,利用开口向下的抓手对物料进行抓取,由于这种抓手是竖直方向设置的,需要在上部预留一定的空间,对于棚车或货箱的封闭空间内的顶部的物料并没有办法进行有效的加持;如专利cn109775390 a提供了一种袋装物料移送装置末端执行器,该末端执行器采用类似于铲车的方式对袋装物料进行加持,但是在末端执行器下端的夹爪27需要直接伸入到袋装物料的下方才能完成对物料的机夹取,由于袋子时柔性的,下端的夹爪27完全气下方时遇到袋表面不平整、褶皱的情况时,容易划破袋子造成物料泄漏,另外,对于大袋的物料,夹爪的承载力存在不足,容易发生脱落的情况;如专利cn214454961 u提供了一种袋装物料移送装置末端执行器,其利用吸盘对物料进行夹取,对于表面不平整的物料吸盘存在吸不牢的问题,虽然位于下方的固定架98能够起到支撑物料的作用,但其也需要直接伸入到袋装物料的下方才能完成对物料的机夹取,容易出现破坏袋子下表面的问题。另外,现有的机械手不能进行尺寸上调整或者调整的幅度有限,会造成对于不同尺寸的物料适用性不足的问题。
技术实现思路
1、本发明是为解决了火车棚车的袋包货物装卸依靠人工以及机械手抓取物料不牢的问题,研发了一款装卸车系统,具有自动化和智能化程度高、袋包装卸效率高、适应性强、夹持性能稳定的特点。
2、本发明为解决技术问题采用如下技术方案:
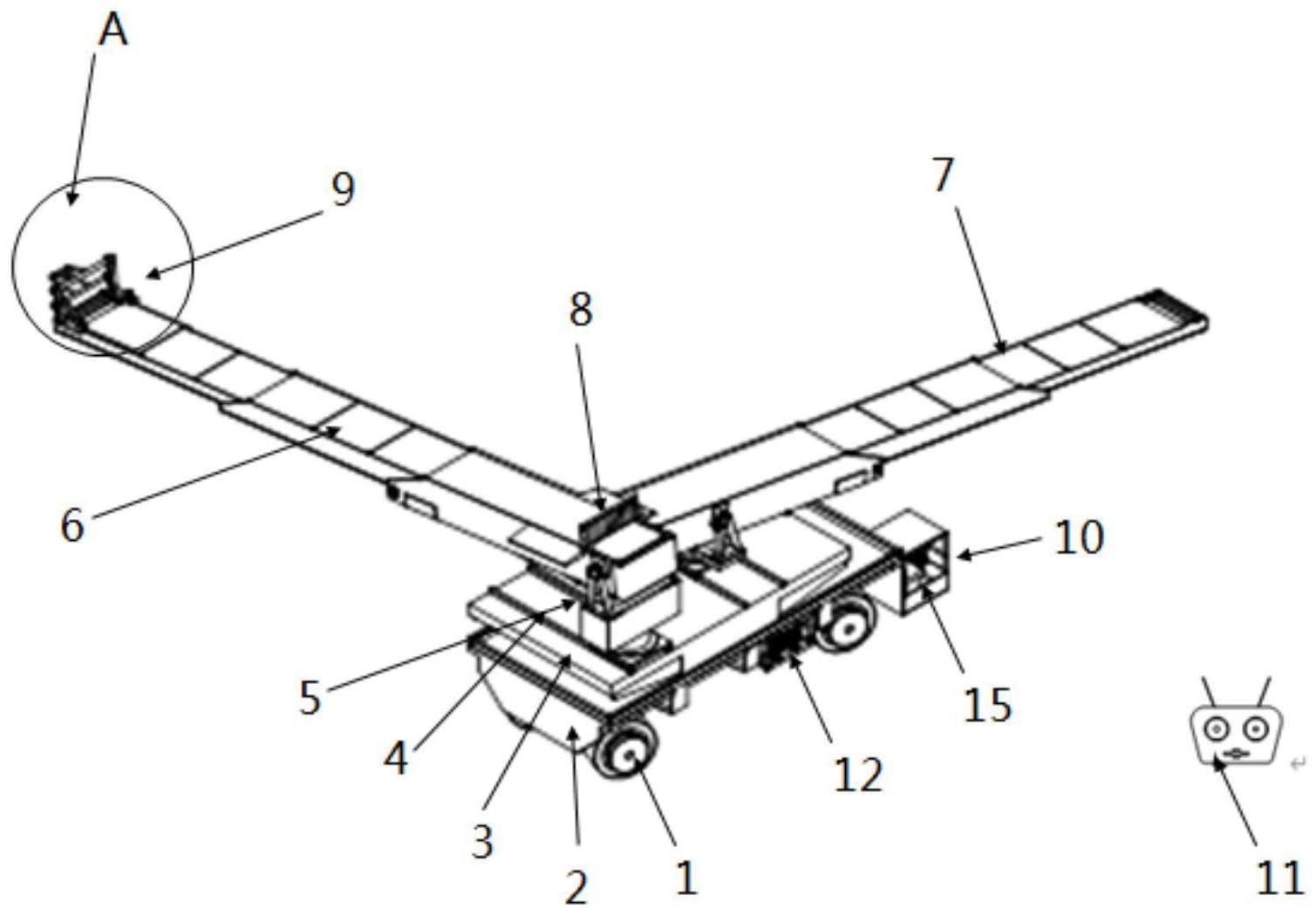
3、一种适用于火车货运袋装物料的全自动装卸机,其特征在于,其包括全向行走动力系统、底盘、袋包夹取机构、自引导系统、控制系统,底盘的下方设置有全向行走动力系统,全向行走动力系统由自引导系统和控制系统进行控制驱动,纵向滑台设置于底盘上端,横向滑移座设置于纵向滑台上端,横向滑移座设置有旋转台座,第一袋包伸缩输送带的一端以及第二袋包伸缩输送带的一端分别置于旋转台座上,改向滚筒置于第一袋包伸缩输送带、第二袋包伸缩输送带的两个靠近的端部之间,袋包夹取机构置于第一袋包伸缩输送带远离旋转台座的一端,袋包智能视觉识别系统设置在袋包夹取机构一侧;
4、袋包夹取机构包括桁架机器人、抓取装置、托盘构件,桁架机器人设置为两套、分别安装于第一袋包伸缩输送带的两侧,在桁架机器人前端依次安装有托盘构件、抓取装置;
5、桁架机器人包括一立柱一,两套桁架机器人的立柱一上端部通过横杆固定连接,立柱一的内侧均设置有一桁架连接件,桁架机器人通过桁架连接件固定在第一袋包伸缩输送带两侧,立柱一外侧均设置有一第一滑轨,桁架机器人包括与第一滑轨可上下滑动连接的横梁,在横梁内套设有伸缩杆,伸缩杆远离横梁的一端通过铰接机构一设置有立柱二,在横梁的上端面固定有气缸,气缸的输出端与铰接机构一的后端相连,使得气缸能够驱动铰接机构一的伸缩运动,立柱二的前端设置有第二滑轨,在第二滑轨上滑动连接有铰接机构二,铰接机构二的前端与托盘构件相连接;
6、抓取装置通过插接组件固定于托盘构件,抓取装置分为下夹板、上夹板,下夹板、上夹板的后端均分别通过第一铰链结构与抓取装置的本体连接,在下夹板、上夹板分别设置有吸盘和若干橡胶头,橡胶头的高度设置为可调的;
7、托盘构件包括框架、托板、托板驱动结构,抓取装置固定连接在框架的前端,在框架的底部可滑动地连接有托板,框架的内部设置托板驱动结构,驱动结构用于驱动托板沿着朝向末端工具的方向进行前后移动。
8、进一步地,橡胶头的高度调整公式为h=l-k*(w/d^2),其中袋包重量为w,吸盘直径为d,吸盘的最大长度为l,橡胶头高度为h,k为与吸盘材料相关的常数。
9、进一步地,袋包智能视觉识别系统设置在托盘构件的一侧。
10、进一步地,底盘的一侧设置有驾驶室。
11、进一步地,还包括有遥控手柄,用于远距离控制全自动装卸机动作。
12、进一步地,所述吸盘为风琴式真空吸盘。
13、本发明的有益效果如下:
14、1.本发明为一种适用于火车货运袋装物料的全自动装卸机,具有全向运动功能、机动性良好,行进路线自主导引、环境适应性强、自动化和智能化程度高、装载效率高等特点。利用桁架机器人配合将托盘结构和抓取装置对袋装物料进行平稳移动;配备有袋包视觉识别智能化系统,可精准识别袋包位置、姿态等,能够辅助袋包夹取机构能够实现全自动化、高效的装卸车作业。
15、2.袋包夹取机构包括能实现多轴联动的桁架机器人,上下和前后方向均具有两级伸缩功能,设计精巧,重量轻,避免运动过程中与输送带干涉,具有两个铰接机构,可以使袋包夹取机构更灵活,能使袋包夹取机构和输送带平行,有利于袋装物料的抓取。两套桁架机构和托盘结构等,能实现多轴联动且不干涉,显著提高作业效率,并能够通过两套桁架机构的配合进行间隔宽度和高度的调整,使得袋包夹取机构能够适配不同尺寸和不同形状的物料。
16、3.在夹板设置吸盘的同时上安装橡胶头,增加摩擦力,避免吸盘吸附不稳的问题;为了保证橡胶头和吸盘能有良好的配合实现,将橡胶头的高度设置为可调的,以保证橡胶头与吸盘之间高度方向出现偏差而出现空隙,确保抓取装置在吸取袋装物料时具有足够的摩擦力,这能够防止袋子滑落或者无法牢固固定在夹板上;
17、4.为了提高抓取装置对物料的支撑力,在抓取装置的后部增设托盘构件,托盘构件包括能够伸缩的托板,利用托板可以实现对大重量的袋装物料的支撑,提高运输物料的稳定性;通过托板的伸缩与夹板的配合,可以避免托板在伸入物料下部时对袋子的损坏。
- 还没有人留言评论。精彩留言会获得点赞!