一种塔式起重机变幅运动的防摇摆控制方法和系统
本发明涉及机械运动控制,尤其涉及一种塔式起重机变幅运动的防摇摆控制方法和系统。
背景技术:
1、随着建筑行业的发展,塔式起重机成为一种必备的起重吊运装备,应用十分广泛。塔式起重机主要运行部分是小车在大臂方向上的平移、吊钩在竖直方向的起升与下降以及回转机构带动塔式起重机大臂等部分进行回转。由于小车与负载之间是通过柔性的钢丝绳连接,所以在小车进行变幅运行时,很容易是负载产生摇摆,一旦摇摆角度过大,那么必将降低塔式起重机的吊运效率,也会产生一些安全问题。
2、目前,大多数处理吊运过程中摇摆是通过手动反向运动来减弱负载的摆动能力,并且结合下方拆卸师傅的工作消除负载摆动,这种负载防摇摆的方法虽然有着稳定、可靠的优点,在一定程度会降低负载摆动,但是也会带来其他问题,比如机械损耗极大、工作效率低、存在安全隐患等。这种方式极大程度上会造成机械损耗,增加拆卸师傅的工作量,造成拆卸师傅的疲惫,也具有一定的安全隐患。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种塔式起重机变幅运动的防摇摆控制方法,能够有效控制负载摆动在一定角度范围之内,实现负载的防摇;所述方法包括以下步骤:
2、步骤1,进行塔式起重机变幅运动的防摇摆控制的数据预处理;
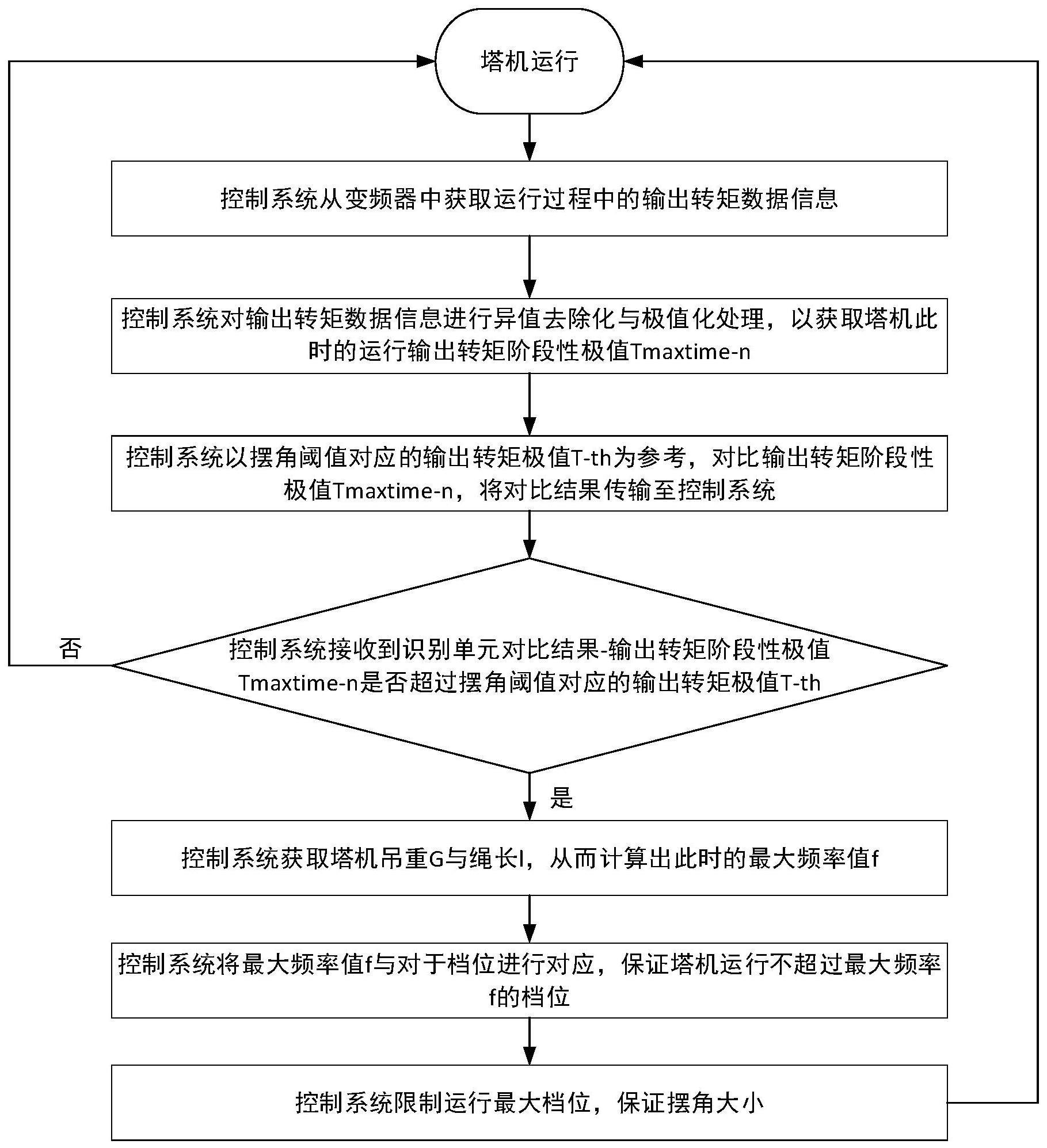
3、步骤2,从变频器中获取塔式起重机运行阶段的变幅输出转矩实时数据;
4、步骤3,对变幅输出转矩实时数据依次进行异值去除化和极值化处理,以获取塔式起重机变幅输出转矩阶段性的最大极值;
5、步骤4,以摆角阈值(一般取值为2.5°)对应的输出转矩极值为参照,检测塔式起重机变幅输出转矩阶段性的最大极值是否超过摆角阈值对应的输出转矩极值;
6、如果是,控制系统获取塔式起重机的吊重(包括吊钩重量)及绳长(小车至吊钩之间的长度),结合摆角阈值对应的输出转矩极值,计算出摆角阈值所对应的最大运行频率值;控制系统将最大运行频率值与档位进行对应,控制系统限制变幅档位对应的运行频率值不超过最大运行频率值;塔式起重机继续按照塔司操控的变幅档位运行;
7、否则,控制系统不限制塔式起重机变幅档位,塔式起重机按照塔司操控的变幅档位继续运行。
8、步骤1包括:
9、步骤1-1,利用labviwe所编写的程序实时采集塔机运行中的输出转矩数据、频率和时间,同时通过塔机上附带的高度传感器与重量传感器获取绳长与吊重,将输出转矩数据分析计算得到塔式起重机吊重货物进行一次变幅运动的最大输出转矩极值;在塔机运行阶段,同步拍摄吊钩运行摆动的情况,将拍摄的视频按照每一帧处理,提取塔机吊钩摆角最大值;
10、步骤1-2,通过数据分析塔机摆动角度与输出转矩有着对应的函数关系;
11、步骤1-3,通过数据分析找出最大输出转矩极值的影响因素,包括吊重、绳长和变幅运行频率;将获取的吊重、绳长、变幅运行频率和输出转矩极值数据进行分析拟合,得到输出转矩极值与吊重、绳长以及变幅运行频率之间的函数关系;同时对输出转矩极值与最大摆动角度进行分析拟合,得到输出转矩极值与摆角之间的函数关系;对以上两个分析拟合进行拟合度检验与显著性分析。
12、步骤1-3中,将所采集的输出转矩数据进行图像化处理,得到最大输出转矩极值t(maxtime-n),与同一次变幅运动所采集的吊重g、绳长l以及变幅运行频率f,进行数据拟合,得到如下函数关系式:
13、t(maxtime-n)=ag+bf+cl+d
14、其中,a、b、c、d为参数,对数据进行计算分析以及拟合,得到最大输出转矩极值、吊重g、绳长l以及变幅运行频率f函数关系式中参数值。
15、步骤1-3中,将所拍摄的塔机变幅运行视频按照每一帧处理的方法,获取塔机最大摆角,结合对应的最大输出转矩,对最大输出转矩极值t(maxtime-n)与摆角θ进行数据拟合,得到最大输出转矩极值t(maxtime-n)与摆角θ具有如下函数关系式:
16、θ=xt(maxtime-n)-y
17、其中,x、y为参数,对数据进行计算分析以及拟合,得到最大输出转矩极值与摆角θ函数关系式中的参数值。
18、根据摆角与最大输出转矩极值之间的函数关系式,结合所设定的摆角阈值2.5°获取摆角阈值所对应的最大输出转矩极值。
19、步骤3包括:
20、按照格拉布斯(grubbs)方法判定变幅输出转矩实时数据是否存在异常值,将异常值从输出转矩极值数据中剔除,不参与极值化计算;
21、在设定的3s时间段内根据极值的定义,计算出设定的3秒内的所有输出转矩极值,并对输出转矩极值进行绝对值处理,然后将输出转矩极值进行大小比较,获取最大输出转矩极值。
22、本发明还提供了一种塔式起重机变幅运动的防摇摆控制系统,包括:
23、预处理单元,用于进行塔式起重机变幅运动的防摇摆控制的数据预处理;
24、第一获取单元,用于从变频器中获取塔式起重机运行阶段的变幅输出转矩实时数据;
25、处理单元,用于对变幅输出转矩实时数据依次进行异值去除化和极值化处理,以获取塔式起重机变幅输出转矩阶段性的最大极值;
26、第二获取单元,用于从重量传感器与高度传感器中获取塔式起重机的吊重及绳长;
27、第一计算单元,用于计算摆角阈值所对应的最大输出转矩极值。
28、检测单元,用于检测塔式起重机变幅输出转矩阶段性的最大极值是否超过摆角阈值对应的输出转矩极值;
29、第二计算单元,用于计算出摆角阈值所对应的最大运行频率值;
30、控制单元,用于限制塔式起重机的变幅档位。
31、所述处理单元包括:
32、第一处理子单元,用于,按照格拉布斯(grubbs)方法判定变幅输出转矩实时数据是否存在异常值,将异常值从输出转矩极值数据中剔除,不参与极值化计算;
33、第二处理子单元,用于,在设定的时间段内根据极值的定义,计算出设定的时间段内的所有输出转矩极值,并对输出转矩极值进行绝对值处理,然后将输出转矩极值进行大小比较,获取最大输出转矩极值。
34、所述系统还包括:
35、获取模块,用于获取塔式起重机运行时刻的变幅频率值;
36、计算模块,用于计算最大运行频率值与塔式起重机运行时刻变幅频率值的差值;控制模块,用于控制变幅频率。
37、本发明还提供了一种存储介质,存储有计算机程序或指令,当所述计算机程序或指令被运行时,实现所述一种塔式起重机变幅运动的防摇摆控制方法。
38、与现有技术相比,本发明具有以下有益效果:
39、本发明中,从变频器中获取塔式起重机运行阶段的变幅输出转矩实时数据;对所述的变幅输出转矩实时数据依次进行异值去除化和极值化处理,以获取所述塔式起重机变幅输出转矩阶段性的最大极值;以摆角阈值对应的输出转矩极值为参照,检测所述塔式起重机变幅输出转矩阶段性的最大极值是否超过摆角阈值对应的输出转矩极值;若是,控制系统获取塔式起重机的吊重(包括吊钩重量)及绳长(小车至吊钩之间的长度),结合摆角阈值对应的输出转矩极值,计算出所述摆角阈值所对应的最大运行频率值;控制系统将所述最大运行频率值与档位进行对应,控制系统限制变幅档位对应的运行频率值不超过所述最大运行频率值;塔式起重机继续按照塔司操控的变幅档位运行;若否,控制系统不限制塔式起重机变幅档位,塔式起重机按照塔司操控的变幅档位继续运行。
- 还没有人留言评论。精彩留言会获得点赞!