折臂吊机防摆主动升沉补偿方法、设备及存储介质
本发明涉及海洋工程,尤其涉及一种折臂吊机防摆主动升沉补偿方法、设备及存储介质。
背景技术:
1、实际海洋工程应用中,作业船舶在海流、潮汐、风浪等复杂海况的联合作用下,不可避免地会产生纵向、横向和垂直方向上的六自由度运动,分别为沿三个坐标轴方向的横荡、纵荡、垂荡运动以及绕三个坐标轴旋转的艏摇、横摇、纵摇运动。近年来,随着动力定位系统的普遍应用,船舶在海上作业过程中的横荡、纵荡以及艏摇运动得到了有效抑制,却仍无法有效解决垂荡、横摇、纵摇运动对船舶海上作业造成的干扰。因此,针对于运动幅度最大的垂荡运动,采用主动式升沉补偿设备对负载与支持平台间的牵连运动进行解耦,逐渐成为了各企业、院校的重点研究课题。
2、然而,船艉a型架或船载折臂吊机在执行升沉补偿动作的过程中,船舶的横摇与纵摇运动将严重影响负载吊点的空间水平位置,从而导致起重负载连同绳缆绕吊点往返摆动,显著降低升沉补偿精度,同时对诸如:海上物资补给转运、海洋油气开发、海底矿产勘探开采以及载人潜器布放回收等船舶海上作业造成恶劣影响,极易导致起重机、a型架等设备的疲劳损坏以及转运物资与目标平台间的冲击破坏,造成巨大的经济损失和安全隐患。
3、目前,实际工程中负载吊放过程的防摆措施主要包括:防摆绳、防摆链等防摆装置,或液压、气动、电动阻尼器等稳定装置,但以上均为摇摆动作发生后的抑制方法,无法解决摆动问题产生的根本原因,即吊点空间水平位置的变化。
4、因此,有必要建立一种基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法,通过适当调节船载折臂吊机的主臂与折臂角度,一定程度抵消横摇、纵摇运动对负载吊点水平位置的干扰,同时结合二次调节液压驱动绞车完成升沉补偿动作,实现更加安全、精确、节能的防摆主动升沉补偿功能,为改进船载折臂吊机设计、促进升沉补偿技术的创新和发展、以及提升海上作业安全性、稳定性以及作业效率提供重要参考。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种折臂吊机防摆主动升沉补偿方法、设备及存储介质,可有效抵消横摇、纵摇运动对吊点水平位置的干扰,从根源上抑制负载的摆动趋势。
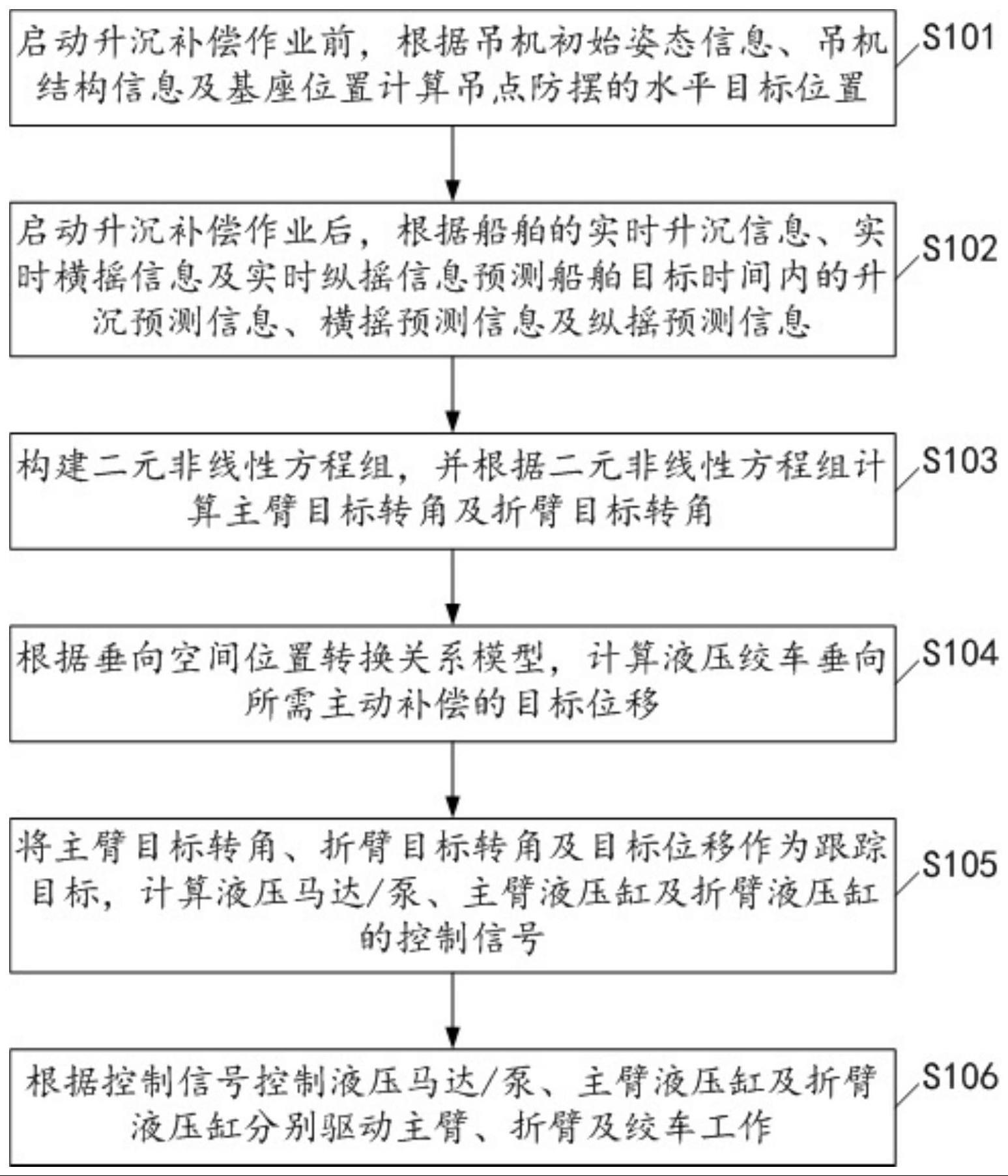
2、为了解决上述技术问题,本发明提供了一种基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法,包括:启动升沉补偿作业前,根据吊机初始姿态信息、吊机结构信息及基座位置计算吊点防摆的水平目标位置;启动升沉补偿作业后,根据船舶的实时升沉信息、实时横摇信息及实时纵摇信息预测船舶目标时间内的升沉预测信息、横摇预测信息及纵摇预测信息;根据所述横摇预测信息、纵摇预测信息、吊机初始姿态信息、吊机结构信息、基座位置及水平目标位置构建二元非线性方程组,并根据所述二元非线性方程组计算主臂目标转角及折臂目标转角;将所述主臂目标转角、折臂目标转角、升沉预测信息、横摇预测信息、纵摇预测信息、吊机初始姿态信息、吊机结构信息、基座位置及前一时刻吊点的垂向空间高度代入垂向空间位置转换关系模型,计算液压绞车垂向所需主动补偿的目标位移;将所述主臂目标转角、折臂目标转角及目标位移作为跟踪目标,计算液压马达/泵、主臂液压缸及折臂液压缸的控制信号;根据所述控制信号控制所述液压马达/泵、主臂液压缸及折臂液压缸分别驱动主臂、折臂及绞车工作。
3、作为上述方案的改进,所述基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法还包括构建基于船舶的空间直角坐标系,所述构建基于船舶的空间直角坐标系的步骤包括:将船舶的重心位置与大地固定坐标系的原点重合;将船艉指向船艏的方向作为x轴的正方向;将右舷指向左舷的方向作为y轴的正方向;将垂直于甲板向上的方向作为z轴的正方向。
4、作为上述方案的改进,当折臂吊机运作至工作位置时,采集吊机初始姿态信息,所述吊机初始姿态信息包括塔身初始转角信息、主臂初始转角信息及折臂初始转角信息。
5、作为上述方案的改进,所述根据吊机初始姿态信息、吊机结构信息及基座位置计算吊点防摆的水平目标位置的步骤包括:根据公式xf=x1+l2sinθ1sinθ2+l3sinθ1sin(θ2+θ3),计算折臂吊机吊点防摆的水平目标位置的x轴坐标xf,其中,x1为基座的x轴坐标,l2为主臂长度,l3为折臂长度,θ1为塔身初始转角,θ2为主臂初始转角,θ3为折臂初始转角;根据公式yf=y1+l2cosθ1sinθ2+l3cosθ1sin(θ2+θ3),计算折臂吊机吊点防摆的水平目标位置的y轴坐标yf,其中,y1为基座的y轴坐标。
6、作为上述方案的改进,基于时间序列法或扩展卡尔曼滤波器,根据实时采集的实时升沉信息、实时横摇信息及实时纵摇信息预测船舶目标时间内的升沉预测信息、横摇预测信息及纵摇预测信息。
7、作为上述方案的改进,所述二元非线性方程组为:
8、
9、其中,θ2d为主臂目标转角,θ3d为折臂目标转角,θp为横摇预测信息,φp为纵摇预测信息,θ1为塔身初始转角,θ2为主臂初始转角,θ3为折臂初始转角,l2为主臂长度,l3为折臂长度,x1为基座的x轴坐标,y1为基座的y轴坐标,xf为吊点防摆的水平目标位置的x轴坐标,yf为吊点防摆的水平目标位置的y轴坐标。
10、作为上述方案的改进,所述垂向空间位置转换关系模型为:
11、
12、其中,sd为液压绞车垂向所需主动补偿的目标位移,θ2d为主臂目标转角,θ3d为折臂目标转角,shp为升沉预测信息,θp为横摇预测信息,φp为纵摇预测信息,θ1为塔身初始转角,l1为塔身长度,l2为主臂长度,l3为折臂长度,x1为基座的x轴坐标,y1为基座的y轴坐标,z1为基座的z轴坐标,zk为前一时刻吊点的垂向空间高度。
13、作为上述方案的改进,根据控制精度要求,采用线性或非线性模型预测控制器在考虑非线性及约束性的前提下,计算液压马达/泵、主臂液压缸以及折臂液压缸的控制信号。
14、相应地,本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中,所述处理器执行所述计算机程序时实现上述基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法的步骤。
15、相应地,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法的步骤。
16、本发明基于二次调节液压驱动的折臂吊机防摆主动升沉补偿方法采用“传感器检测->预测->数据处理->控制->二次调节液压驱动->机械执行”的方式实现了折臂吊机的防摆主动升沉补偿。实施本发明,具有如下有益效果:
17、1、本发明实现了折臂吊机负载防摆与主动升沉补偿功能的结合。借助吊机主臂、折臂的旋转抵消了横摇、纵摇运动对吊点水平位置的干扰;相比于传统的负载吊放防摆方法,能够从根源上抑制负载的摆动趋势,为绞车安全、稳定、准确的执行主动升沉补偿动作提供了技术保障。
18、2、本发明还引入了二次调节液压驱动绞车完成升沉补偿动作,能够节省防摆主动升沉补偿过程中的能源消耗;
19、3、本发明可用于物资转运、海底矿产勘探、载人潜器布放回收等海上作业过程,为改进船载折臂吊机设计、促进升沉补偿技术的创新和发展、以及提升海上作业安全性、稳定性以及作业效率提供了重要参考。
- 还没有人留言评论。精彩留言会获得点赞!