一种配电房内进行干式变压器和配电柜搬运工作的机器人的制作方法
本发明属于自动化设备,尤其涉及一种配电房内进行干式变压器和配电柜搬运工作的机器人。
背景技术:
1、从上世纪七十年代起,中国工业机器人研究开始逐步展开,但直到八十年代中期,得益于国家科技攻关项目的支持,机器人研究进入高速发展的新阶段。我国搬运机器人的发展比欧美各国、日本都要晚。1976年,北京起重机械研究所研制出中国首台搬运机器人zdb-1,并完成了首套搬运机器人滚珠加工演示系统。然而,此时我国对搬运机器人的相关研发技术掌握的不够完善。20世纪80年代,在“863计划”的推动下,很多研究院所和高校开始研究搬运机器人,并相继研制出门类齐全、功能各异的搬运机器人。1988年,北京邮政科学技术研究所研发了第一套邮政枢纽搬运机器人系统。1991年,新松机器人自动化股份研究公司和中科院沈阳自动化研究所研发的搬运机器人系统用于沈阳金杯汽车厂的汽车装配线中,并于1996年获国家科学技术进步三等奖,是当时国内较为先进的搬运机器人。1992年天津理工学院研制成功了光学导引搬运机器人,并且光学导引搬运机器人应用于核电站工作。九十年代中期,国内制药行业、烟草行业、汽车行业等开始广泛应用搬运机器人。1998年,在红河卷烟厂,昆明船舶设备公司研制了多模式激光导引搬运机器人,并在4年后获得了国家科学技术进步二等奖。2007年,新松为美国通用汽车的墨西哥工厂设计与配置搬运机器人系统,创造了国产搬运机器人系统产品出口国际市场的先河。近几年来,随着引进技术与自主创新,国内搬运机器人制造技术逐渐成熟,逐渐向专业化、智能化、集成化的方向发展。2018年,米克力美成功研发国内首款无轨导航搬运机器人dz-80,并应用于物流自动化搬运系统中,显示了中国企业具有的创新发展能力。目前,我国搬运机器人产业正处于蓬勃发展阶段并显示了非常巨大的潜力。
2、由中国国家知识产权局查阅相关配电柜搬运机器人装置,例如:
3、(1)在变压器搬运方面:
4、变压器搬运设备(申请号:cn2020221112436,公开(公告)号:cn213008205u)、一种便于搬运的变压器(申请号:cn2020213800133,公开(公告)号:cn212365694u)、一种变压器搬运装置(申请号:cn2020218174780,公开(公告)号:cn213473235u)、一种便于使用的变压器快速搬运装置(申请号:cn202020886598x,公开(公告)号:cn212685653u)、一种用于变压器转运的支撑装置(申请号:cn2020208536075,公开(公告)号:cn212556404u)、一种具有减震功能的变压器用搬运装置(申请号:cn2020208409741,公开(公告)号:cn212685649u)等等。
5、(2)在配电柜搬运方面:
6、一种便于限位的配电柜搬运装置(申请号:cn2020220599280,公开(公告)号:cn213168224u)、一种操作便捷灵巧的集装箱用配电柜搬运装置(申请号:cn2020217627707,公开(公告)号:cn213008285u)、一种配电柜转移的配电柜搬运装置(申请号:cn2020216342404,公开(公告)号:cn212828479u)、一种便于限位的配电柜搬运装置(申请号:cn2020220599280,公开(公告)号:cn213168224u),一种可移动式配电柜搬运车(申请号:cn2020210860734,公开(公告)号:cn212500574u)等等。
7、上述这些专利成果的特点体现在:
8、(1)主要针对干式变压器或配电柜中的一种设备进行转运,无法同时兼顾这两种设备;
9、(2)基本集中在搬运小车的机械结构简单改进上,具体操作以人力推拉小车进行搬运;
10、(3)不具有智能转运控制,不具有环境的适应性和自主性。
11、总的来说,无论是国内还是国外,对于搬运机器人的研制,普遍集中在机械部件研发及结构优化、控制的稳定性和安全性,以及场景环境下的智能化运动设计等方面,对于如何满足行业需求、降低成本、提高效率的前提下搭载大重量负载并实现在狭窄空间下的准确移动、精准定位,始终是智能搬运机器人技术突破的追求目标。
12、基于以上分析,本项目所研制的配电房干式变压器、配电柜搬运机器人有着很强的行业特色和应用价值,充分体现了智能化新技术应用的发展趋势,符合人力、财力、物力、时间等成本节约和高效使用的迫切需求。
技术实现思路
1、本发明的目的在于提供一种配电房内进行干式变压器和配电柜搬运工作的机器人,旨在解决所述背景技术中存在的问题。为实现所述目的,本发明采用的技术方案是:
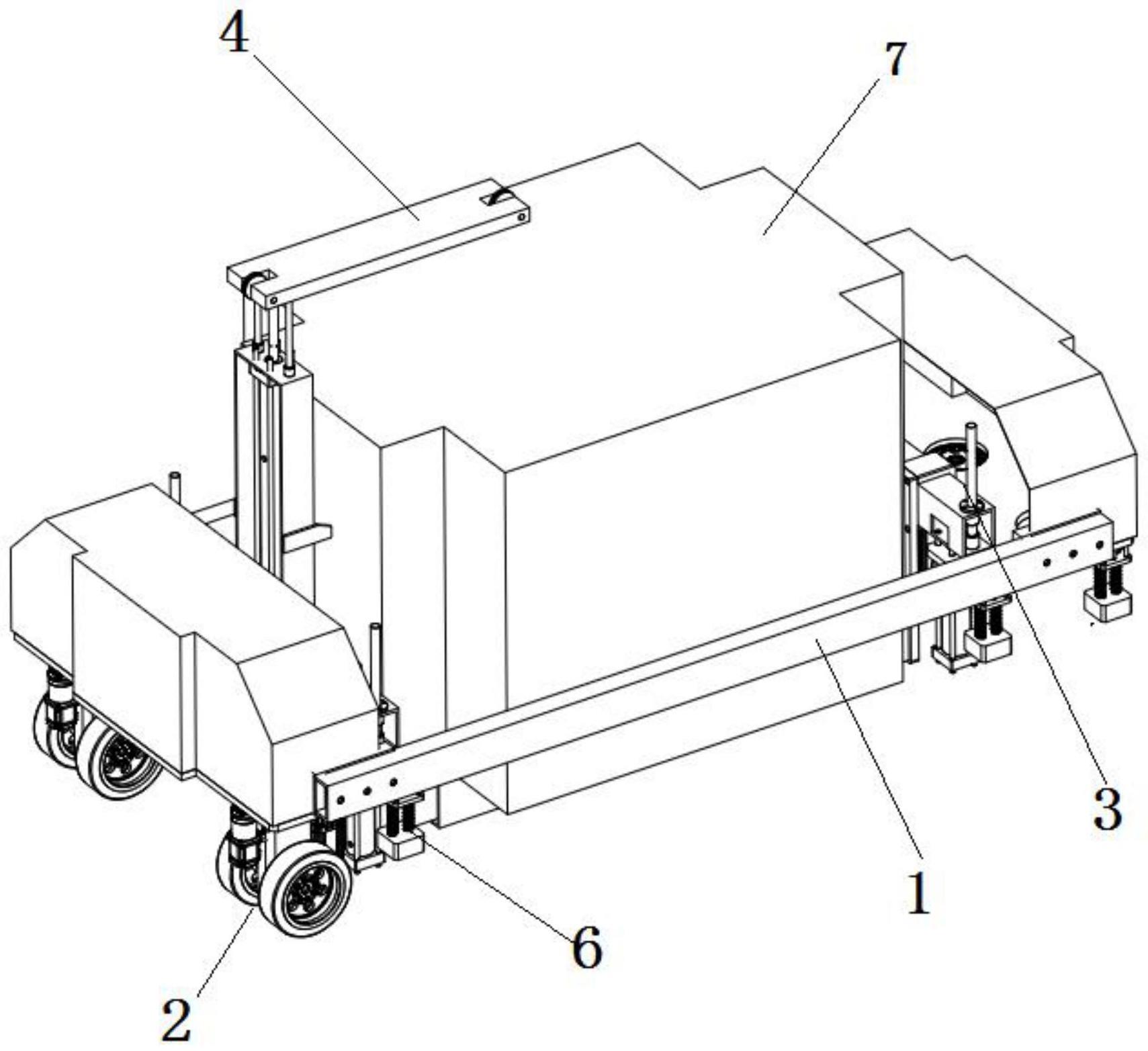
2、一种配电房内进行干式变压器和配电柜搬运工作的机器人,包括固定架、u型钢架、控制电箱、驱动轮模块、平衡转向模块、夹持抬升模块、吊架辅助模块、气泵和承载物;所述驱动轮模块和平衡转向模块直接通过固定架完成连接;
3、所述u型钢架成对设置,且主体安装结构呈u型开口结构,左右对称;所述气泵通过两个螺栓安装在u型钢架的后面,且底下安装有两个驱动轮模块;
4、控制电箱安装在气泵的底部,用于控制气泵各项操作与控制驱动轮模块和平衡转向模块的移动;
5、驱动轮模块位于u型钢架的后面左右两侧,呈对称安装,控制双履带运动,为整个机器人移动的动力来源;
6、平衡转向模块位于u型钢架的前侧,用于控制机器人的的转向以及控制平衡使变压器等其他部件呈的一直保持水平的状态;
7、夹持抬升模块位于u型钢架的中间;
8、吊架辅助模块,位于整个u型钢架的上方,起稳定与平衡承载物的作用。
9、优选的,所述驱动轮模块和平衡转向模块构造均相同,所述平衡转向模块包括驱动电机、履带轮、驱动齿轮、转向电机和转向齿轮,所述驱动电机设在所述履带轮一侧,用于驱动所述履带轮转动;所述转向电机的输出端连接有所述驱动齿轮,所述驱动齿轮与所述转向齿轮啮合,所述转向齿轮用于驱动履带轮的转向运动。
10、优选的,所述吊架辅助模块包括第一滑轮、第二滑轮、固定套、吊架气缸和吊架;所述吊架设在固定套的上方,所述固定套内安装有吊架气缸,所述吊架的前后两端分别设有第一滑轮和第二滑轮。
11、优选的,所述夹持抬升模块包括固定柱、u型钢架、抬升气缸、底板、固定轴承和第一滑动杆,所述u型钢架固定在所述固定柱的两侧,所述底板的两侧各设有所述抬升气缸,所述抬升气缸的输出端抵接所述固定柱连接,所述底板的上部通过固定轴承套设有第一滑动杆,所述抬升气缸用于驱动整体的固定柱上下运动,所述第一滑动杆贯穿所述固定柱并对固定柱的运动进行限位。
12、优选的,所述夹持抬升模块的底部还设有减震模块,所述减震模块安装在所述底板下方;所述减震模块包括底座、弹簧、盖板、轴承座和第二滑动杆;
13、所述底板的上端通过轴承座套设有第二滑动杆,所述第二滑动杆贯穿所述底板、盖板、弹簧后固定在所述底座上,所示盖板的上端通过螺丝与底板固定连接。
14、本发明的有益效果:
15、1、可在配电房内稳定安全作业,降低人力资源、成本,提高电力设备运转的工作效率和可靠性;
16、2、工作场景的适用性较广,独立的驱动模块符合复杂路径的作业场景。
- 还没有人留言评论。精彩留言会获得点赞!