一种真空高压环境用的封微孔机的制作方法
本发明涉及封微孔机械领域,特别是涉及可在真空高压环境下使用的封微孔机械。
背景技术:
1、封口机是用于自动化进行封口操作的机械,通常根据所要封口工作的产品不同,所应用的自动化封口机的机械结构各有不同,例如袋装封口和罐装封口就是完全不同的封口机械,因此通常不同形式包装的产品封口机械不同,很难通用多个领域包装产品,还有,常见的多为不需要在特殊环境下进行且应用于待封的口相对是较为明显的封口机械。
2、对于现有的一种特殊性质的工件,工件内包含有可能会对人体有害的物质,需要通过向工件内充入特殊高压气体(这种高压气体有的会采用可能对人体有害的气体)来稳定住内部物质,因此这种工件具有充入高压气体的端口并且该端口为微小的孔,充入高压气体完成后必须对该微小的孔进行封孔来防止内部物质或气体泄露出,由于工件内包含的物质及充入的高压气体可能具有危害性,因此这种工件在充入高压气体前后的所有操作必须要在密封的环境内进行所有流程操作。上述这种特殊性质工件的结构有的如图5所示的,包括具有细长的进气管101的工件主体10和连接在细长的进气管101的外端口上针状的充气管102,这种充气管102的外管口直径大小通常不超过1毫米,属于高微孔,高压气体从该高微孔充入进工件主体内部,充完后必须将充气管102的高微孔封住来保持内部压力稳定,从而实现稳定内部物质,封这种较细小的充气管102的高微孔,目前采用的是通过一小颗粒状的封孔物体塞入在充气管102的高微孔内来实现封孔。但是,上述这种采用小颗粒状的封孔物体塞入在不超过1毫米的充气管102的高微孔内的封孔操作明显可见的需要非常高精准度要求。如果要实现机械自动化的有效进行封微孔操作,需要采用能够实现极高精度的机械装置,但是目前并没有可靠有效的机械装置能够适用于进行这种操作的自动化封微孔,还有,由于操作环境的特殊要求和上述针状的充气管细小特点需要极高精度的要求,其封微孔操作难度极大,极其不易实现,因此目前这些操作过程大部分主要还是人工手动在密闭的环境内操作进行,人工参与操作工作部分多,存在较多问题,有鉴于此,现有的这种工件的封微孔操作方式亟待改进,同时能够达到上述要求进行封微孔操作的自动化机械也亟待研发,遂有本案产生。
技术实现思路
1、本发明的目的在于提供一种真空高压环境用的封微孔机,其机械本身能够达到高精度、有效可靠的机械自动化操作,又可实现降低上述工件封微孔操作的精度要求和可高清视觉操作的辅助人工进行有效封微孔操作。
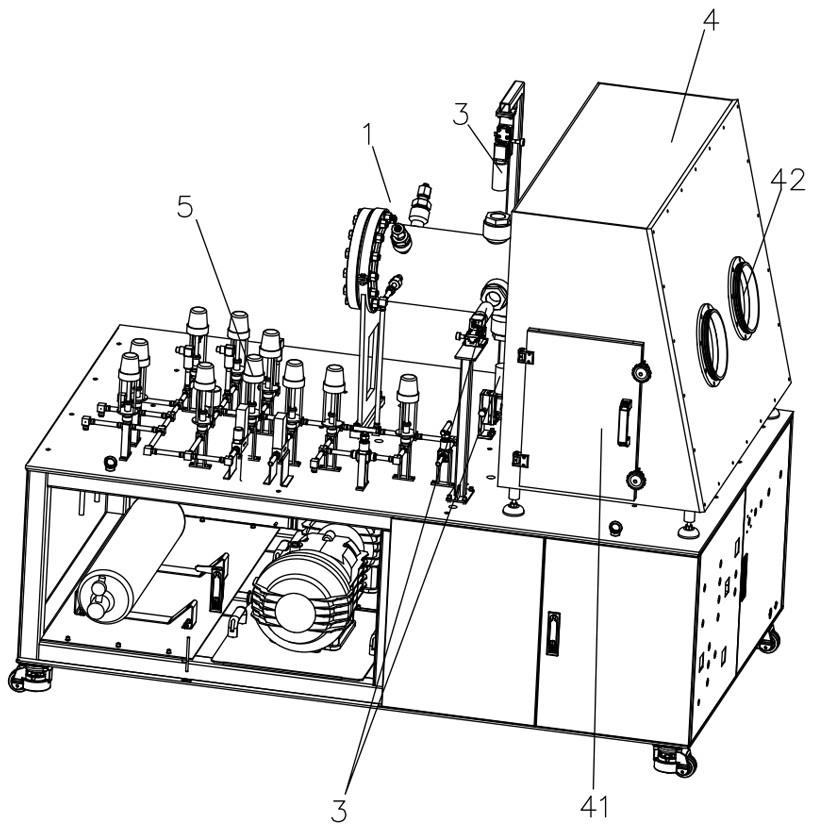
2、为实现上述目的,本发明的技术方案是:一种真空高压环境用的封微孔机,包括压力容器和设置在压力容器内的封微孔操作装置,所述压力容器为可密闭容器,其容器壁上设有供封微孔操作装置与外部电源连接的电极接头、供连接外部的配气系统向压力容器内充入气体或排气的配气接头阀以及可打开或密封闭合的取放舱门,所述封微孔操作装置包括多轴笛卡尔坐标移动装置、通过相对定位的结构并以可拆装方式搭载在多轴笛卡尔坐标移动装置上的载胶片和工件定位板以及设置在多轴笛卡尔坐标移动装置上的传感定位结构,通过所述多轴笛卡尔坐标移动装置搭载载胶片和工件定位板实现操作所需的相对位置的移动调整。
3、所述多轴笛卡尔坐标移动装置包括底座、固定安装在底座上的第一x轴真空直线电机、通过第一x轴导向滑动结构连接在底座上并且与第一x轴真空直线电机的第一x轴输出动作部件连接的第一滑动安装架、固定安装在第一滑动安装架上的y轴真空直线电机、通过y轴导向滑动结构连接在第一滑动安装架上并且与y轴真空直线电机的y轴输出动作部件连接的第二滑动安装架、固定安装在第二滑动安装架上的z轴真空直线电机、通过z轴导向滑动结构连接在第二滑动安装架上并且与z轴真空直线电机的z轴输出动作部件连接的第三滑动安装架、固定安装在底座上的第二x轴真空直线电机、通过第二x轴导向滑动结构连接在底座上并且与第二x轴真空直线电机的第二x轴输出动作部件连接的第四滑动安装架、固定连接在第三滑动安装架上的载胶托板以及固定连接在第四滑动安装架上的载工件放置框架;所述传感定位结构以能够分别传感获得第一滑动安装架、第二滑动安装架、第三滑动安装架和第四滑动安装架位置的结构布设,所述载胶托板和载工件放置框架靠近取放舱门设置。
4、所述传感定位结构包括设置底座上的第一接近传感器、设置在第一滑动安装架上供与第一接近传感器传感作用的第一传感部、设置在第一滑动安装架上的第二接近传感器、设置在第二滑动安装架上供与第二接近传感器传感作用的第二传感部、设置在第二滑动安装架上的第三接近传感器、设置在第三滑动安装架上供与第三接近传感器传感作用的第三传感部、设置在底座上的第四接近传感器以及设置在第四滑动安装架上供与第四接近传感器接近传感作用的第四传感部。
5、所述载胶托板上设有可供载胶片定位嵌入稳定放置的载胶片托环;和/或,所述载工件放置框架设有可供工件定位板定位嵌入稳定放置的嵌入台阶。
6、所述载工件放置框架和工件定位板上分别设有相互定位连接的连接部件,所述连接部件为磁吸连接部件、穿插连接部件或卡扣连接部件,所述工件定位板上还设有用于将放置其上的工件定位固定住的工件定位结构和用于将工件待封微孔的部分穿过工件定位板并对应在载胶片上方定位固定住的微孔定位结构。
7、还包括密闭设置在压力容器的容器壁上的透视窗、设置在压力容器外并对应透视窗拍摄的高清摄像设备、设置在压力容器内的照明灯以及连接高清摄像设备、压力容器和多轴笛卡尔坐标移动装置的视觉操作控制系统;所述透视窗包括从侧面角度可同时观察到载胶片和放置在工件定位板上待封微孔的工件部分的侧向透视窗、从俯视角度可观察到载胶片上面和/或工件定位板上面的俯视透视窗以及从仰视角度可观察到载胶片下面和/或工件定位板下面的仰视透视窗;所述多轴笛卡尔坐标移动装置的结构设置为避免阻挡通过透视窗观察的结构设置。
8、所述压力容器在对应取放舱门一面还密封连接有密闭操作箱,所述密闭操作箱上设有箱门、供手臂从外部穿入密闭操作箱内操作和打开取放舱门内操作的手套以及操作透视区,所述密闭操作箱上设有操作箱配气接头阀供与外部的配气系统连接。
9、上述一种真空高压环境用的封微孔机的使用操作方法,其特征在于,使用操作方法步骤如下,
10、s1、将密封包装的待充入高压气体和封微孔操作的工件、滴好胶滴的载胶片和工件定位板放置在密闭操作箱内;
11、s2、将压力容器、密闭操作箱内部与外部环境密闭隔绝开,通过配气系统将密闭操作箱调整为负压真空状态或者将密闭操作箱和压力容器内都整为负压真空状态,待密闭操作箱内的负压真空值达到预设定的负压真空值时停止抽真空;
12、s3、操作人员手臂从密闭操作箱上的手套穿入,将密闭操作箱内密封包装的工件取出,通过工件定位结构将工件主体定位固定在工件定位板上,通过微孔定位结构将工件的充气管以其微孔朝下并穿出在工件定位板的下表面的状态定位固定在工件定位板上;
13、s4、将定位固定好工件的工件定位板从打开的取放舱门处放入压力容器内的多轴笛卡尔坐标移动装置的载工件放置框架上并定位稳定连接住,将载胶片从打开的取放舱门处放入压力容器内的多轴笛卡尔坐标移动装置的载胶片托环上定位稳定放置;
14、s5、关闭压力容器的取放舱门,与密闭操作箱密闭隔绝开;
15、s6、如步骤s2中已通过配气系统将压力容器内调整为负压真空状态并且达到本步骤所需的负压真空值时停止抽真空,进入步骤s7,否则,通过配气系统将压力容器内调整为负压真空状态并且达到本步骤所需的负压真空值时停止抽真空;
16、s7、通过配气系统向压力容器内充入高压气体,高压气体从工件的充气管进入工件主体内,待压力容器的压力值达到预设定的压力值时,停止充入高压气体;
17、s8、多轴笛卡尔坐标移动装置启动,首先,通过调整实现第四滑动安装架x轴方向的移动带动载工件放置框架移动使得工件定位板上的工件充气管对应至封微孔工位,通过调整实现第三滑动安装架x轴和y轴方向的移动带动载胶托板移动使得载胶片上的胶滴对应在工件充气管的正下方;接着,通过调整实现第三滑动安装架z轴正方向的移动带动载胶托板移动使得载胶片上的胶滴与工件的充气管接触并且胶粘附在充气管上封住其微孔,然后,通过调整实现第三滑动安装架z轴负方向的移动带动载胶托板移动使得载胶片上的胶滴与工件的充气管分离开;
18、s9、按预设的时间等待粘附在充气管上并封住其微孔的胶干;
19、s10、首先,通过配气系统将密闭操作箱调整为负压真空状态,待密闭操作箱内的负压真空值达到预设定的负压真空值时停止抽真空;通过配气系统对压力容器以缓慢的方式进行泄压,泄压至大气压状态,或者,通过配气系统对压力容器以缓慢的方式进行泄压并以缓慢的方式调整为负压真空状态,再缓慢充入大气;接着,打开压力容器的取放舱门,将载胶片从载胶片托环上取出放置在密闭操作箱内,将压力容器内的工件定位板解除与载工件放置框架的连接,取出放置在密闭操作箱内,接着将工件解除工件定位结构和微孔定位结构的定位固定并取下密封包装住;
20、s11、将密闭操作箱中密封包装好的工件取出。
21、上述步骤s8中,操作人员通过视觉操作控制系统多角度观察压力容器内多轴笛卡尔坐标移动装置的调整状态、工件的充气管与胶滴的对应状态和胶覆在充气管上封住微孔的状态,通过视觉操作控制系统可控制多轴笛卡尔坐标移动装置的调整移动。
22、通过采用上述技术方案,本发明的有益效果是:
23、1、上述结构设置的封微孔机,其具有可适于负压真空环境和高压环境使用的压力容器以及在设置在该压力容器内封微孔操作装置,可将需要充入高压气体和/或进行封微孔的工件放置在内进行操作,结合上述进一步设置的密封操作箱操作使用,该机械结构能够达到缩小操作进行需要的空间,可减少高压气体充满的时间和使用量,对于存在有害物质或气体的还可缩小物质散发空间,还有利于根据加工处理的物体、气体是否存在污染、有害等性质来调整操作流程,可提升操作流程的严谨性,可提升操作人员工作环境的安全性。
24、2、上述封微孔操作装置采用的是多轴笛卡尔坐标移动装置,机械结构可紧凑小型化结构设置,可尽量缩小体积,节省空间,有利于缩小压力容器体积,达到上述减少高压气体充满的时间和使用量等的效果,还有可降低机械的制造成本;上述进一步的多轴笛卡尔坐标移动装置的具体结构设置,机械结构稳定可靠且动作灵敏顺畅,其驱动采用的真空直线电机可在真空高压环境下稳定使用,并且其是高分辨率电机,最小步长可在2微米,因此可达到极高的动作精度,可以满足有极高精度操作要求的使用,还有其传感定位结构的设置能够精准确定多轴笛卡尔坐标移动装置的各轴动作位置状态,有利于提升装置动作位置的精准确定和调整。
25、3、上述多轴笛卡尔坐标移动装置搭载的载胶片和工件定位板,搭载两者移动调整,使得两者可为上下对应,载胶片用于胶滴在其上,工件定位板用于定位工件及其待封微孔的部分并对应在胶滴上方,这种机械结构设置提供了一种不同于上述背景技术中需要极高精度操作要求的新的封微孔方式,提供了一种能够降低封微孔操作精度要求的方式,通过工件需要封微孔的部分与胶滴接触并且胶覆在充气管上封住微孔,待胶干后即可达到封微孔的作用,如此只要工件需要封微孔的部分能够与胶滴接触即可实现,胶滴较大即可很方便实现操作,可大大降低对精度的要求,而上述多轴笛卡尔坐标移动装置能够实现高精度动作能够有利于紧凑机械结构、减少浪费胶和一个工件定位板上同时定位固定多个工件需要有一定精度要求的应用,这里一个工件定位板上同时定位固定多个工件可实现一次配气多个工件完成充入高压气体和封微孔操作,有利于提高效益。
26、4、上述机械结构设置的封微孔机除了可应用于上述背景技术及附图中涉及的工件以外,也可适用于其他有同样操作环境需要的容器应用,如其他对人体无害但也需要充入高压气体的容器的微孔或较小充气口的封口操作。
27、5、上述进一步的高清摄像设备、视觉操作控制系统等的结构设置,可实现通过视觉设备的观察、观测,可实现在拍摄图像上直接选择运动位置等直观、简单、方便、精准可靠的操作,可实现更多拓展功能作用效果的应用。
- 还没有人留言评论。精彩留言会获得点赞!