集装箱内的装箱方法及拆箱方法与流程
本发明涉及工业机器人,具体地,涉及一种集装箱内的装箱方法及拆箱方法。
背景技术:
1、工业机器人,是一种具备了传感器、物镜和电子光学系统的智能设备,可以快速进行货物分拣和搬运。
2、越来越多的视觉传感器、力传感器会使用到工业机器人上,工业机器人将会变得越来越智能化。随着传感与识别系统、人工智能等技术进步,机器人从被单向控制向自己存储、自己应用数据方向发展,逐渐信息化。
3、当通过工业机器人对货物进行分拣和搬运时,需要通过视觉传感器对货物进行图像采集,通对所述货物的图像进行识别确定货物的姿态,然后工业机器人通过装载的夹具或吸盘对该货物进行拣选或搬运。当通过工业机器人对货箱内的货物进行拆卸时,由于货物的抓取方向的限制,在拆码垛等拣选场景中的夹具应用到该种场景中时不仅抓取范围受限制,而且易磨损和损坏。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种集装箱内的装箱方法及拆箱方法。
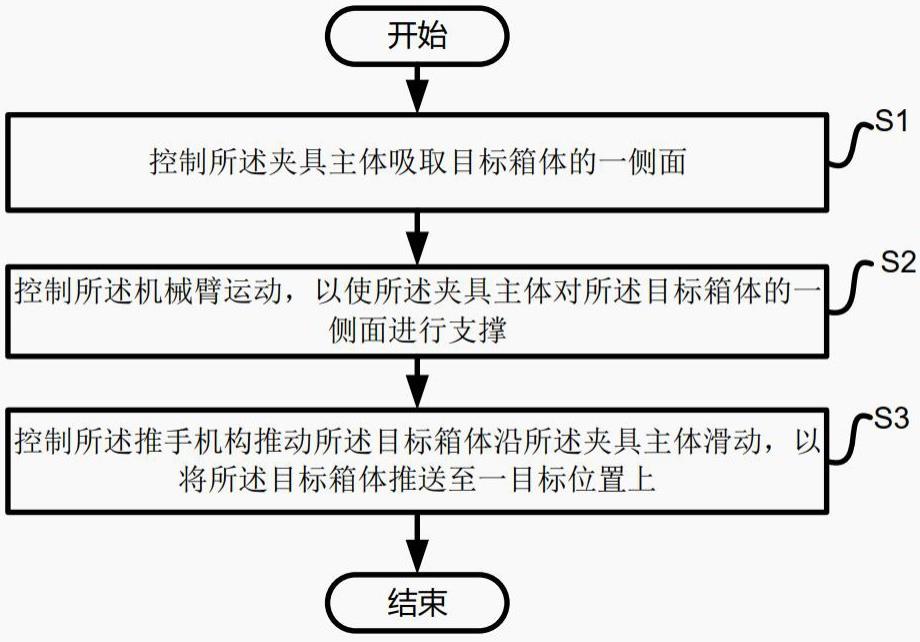
2、根据本发明提供的集装箱内的装箱方法,通过装卸机器人进行,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,包括如下步骤:
3、步骤s1:控制所述夹具主体吸取目标箱体的一侧面;
4、步骤s2:控制所述机械臂运动,以使所述夹具主体对所述目标箱体的一侧面进行支撑;
5、步骤s3:控制所述推手机构推动所述目标箱体沿所述夹具主体滑动,以将所述目标箱体推送至一目标位置上。
6、优选地,所述步骤s2包括如下步骤:
7、步骤s201:控制所述机械臂运动,以使所述夹具主体运动至目标位置前侧;
8、步骤s202:调整所述夹具主体的位姿,以使所述目标箱体位于所述夹具主体的上侧;
9、步骤s203:降低所述吸盘阵列对目标箱体的吸力,以使所述夹具主体上端滚珠支撑机构对所述目标箱体进行支撑。
10、优选地,所述步骤s3包括如下步骤:
11、步骤s301:获取箱体垛或集装箱底侧面上的目标摆放位置;
12、步骤s302:控制所述推手机构推动所述目标箱体沿所述夹具主体向所述目标摆放位置的方向滑动;
13、步骤s303:当所述推手机构运动至所述夹具主体的末端,所述目标箱体脱离所述夹具主体向前滑动至所述目标摆放位置。
14、优选地,所述滚珠支撑机构包括:第一支撑杆、第二支撑杆、安装杆以及滚珠件;
15、所述第一支撑杆和所述第二支撑杆设置在所述夹具主体的一侧面上;
16、所述安装杆的一端固定在所述第一支撑杆的自由端上,另一端固定在所述第二支撑杆的自由端上。
17、优选地,多个所述滚珠件依次安装在所述安装杆上;
18、所述第一支撑杆上套有第一弹簧件,所述安装杆的一端限位在所述第一弹簧件的外端和所述第一支撑杆的自由端之间;
19、所述第二支撑杆上套有第二弹簧件,所述安装杆的另一端限位在所述第二弹簧件的外端和所述第二支撑杆的自由端之间。
20、根据本发明提供的集装箱内的装箱方法,通过装卸机器人进行,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,包括如下步骤:
21、步骤m1:控制所述夹具主体吸取目标箱体的一侧面;
22、步骤m2:控制所述支撑板机构伸出,以使所述支撑板机构的支撑面与所述目标箱体的另一侧面相对;
23、步骤m3:控制所述机械臂运动,以使所述支撑板机构的支撑面对所述目标箱体的另一侧面进行支撑;
24、步骤m4:控制所述推手机构推动所述目标箱体沿所述支撑面滑动,以将所述目标箱体推送至一目标位置上。
25、优选地,所述夹具主体的一侧面设置有吸盘阵列,所述吸盘阵列包括第一吸盘阵列和第二吸盘阵列,另一侧面用于连接机器人的末端法兰;
26、所述推手机构设置在所述第一吸盘阵列和所述第二吸盘阵列之间,所述推手机构能够沿所述夹具主体的长度方向伸出或缩回,以将所述目标箱体由所述第一吸盘阵列和第二吸盘阵列上侧推出;
27、所述夹具主体的两侧端设置有支撑板机构,所述支撑板机构能够沿垂直所述夹具主体平面的方向伸出或缩回,用于对所述吸盘阵列吸取的所述目标箱体进行支撑。
28、优选地,所述步骤m3包括如下步骤:
29、步骤m301:控制所述机械臂运动,以使所述夹具主体运动至目标位置前侧;
30、步骤m302:调整所述夹具主体的位姿,以使所述目标箱体位于所述支撑面上侧,所述支撑板机构的支撑面对所述目标箱体的另一侧面进行支撑;
31、步骤m303:降低所述吸盘阵列对目标箱体的一侧面的吸力。
32、优选地,所述步骤m4包括如下步骤:
33、步骤m401:获取箱体垛或集装箱底侧面上的目标摆放位置;
34、步骤m402:控制所述推手机构推动所述目标箱体沿所述支撑面向所述目标摆放位置的方向滑动;
35、步骤m403:当所述推手机构运动至所述夹具主体的末端,所述目标箱体脱离所述支撑面向前滑动至所述目标摆放位置。
36、根据本发明提供的集装箱内的拆箱方法,通过装卸机器人进行,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,包括如下步骤:
37、步骤n1:控制所述推手机构运动至所述夹具主体的末端,以使所述推手机构上吸盘吸住所述目标箱体的一侧面;
38、步骤n2:控制所述推手机构反向运动,带动所述目标箱体运动至所述夹具主体上,以使所述夹具主体对所述目标箱体的一侧面进行支撑;
39、步骤n3:控制所述夹具主体上的吸盘阵列对所述目标箱体的一侧面施加吸力以吸住所述目标箱体;
40、步骤n4:控制所述机械臂运动,以将所述目标箱体摆放至一目标位置上。
41、与现有技术相比,本发明具有如下的有益效果:
42、本发明中夹具主体的一侧面设置有吸盘阵列,所述吸盘阵列包括第一吸盘阵列和第二吸盘阵列,在所述第一吸盘阵列和所述第二吸盘阵列之间设置有推手机构,当控制所述夹具主体吸取目标箱体的一侧面,控制所述机械臂运动,以使所述夹具主体对所述目标箱体的一侧面进行支撑,进而控制所述推手机构推动所述目标箱体沿所述夹具主体滑动,以将所述目标箱体推送至一目标位置上,从而能够便于在箱体垛顶层区域放置箱子进行码垛,从而在集装箱等限制空间的环境中进行码垛时提高了码垛上限高度和装箱数量。
技术特征:
1.一种集装箱内的装箱方法,通过装卸机器人进行,其特征在于,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,所述夹具主体的一侧面设置有吸盘阵列,所述吸盘阵列包括第一吸盘阵列和第二吸盘阵列,另一侧面用于连接机器人的末端法兰;所述推手机构设置在所述第一吸盘阵列和所述第二吸盘阵列之间,所述推手机构能够沿所述夹具主体的长度方向伸出或缩回,以将目标箱体由所述第一吸盘阵列和第二吸盘阵列上侧推出;所述夹具主体的两侧端设置有支撑板机构,所述支撑板机构能够沿垂直所述夹具主体平面的方向伸出或缩回,用于对所述吸盘阵列吸取的所述目标箱体进行支撑,包括如下步骤:
2.根据权利要求1所述的集装箱内的装箱方法,其特征在于,所述步骤s2包括如下步骤:
3.根据权利要求1所述的集装箱内的装箱方法,其特征在于,所述步骤s3包括如下步骤:
4.根据权利要求2所述的集装箱内的装箱方法,其特征在于,所述滚珠支撑机构包括:第一支撑杆、第二支撑杆、安装杆以及滚珠件;
5.根据权利要求4所述的集装箱内的装箱方法,其特征在于,多个所述滚珠件依次安装在所述安装杆上;
6.一种集装箱内的装箱方法,通过装卸机器人进行,其特征在于,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,所述夹具主体的一侧面设置有吸盘阵列,所述吸盘阵列包括第一吸盘阵列和第二吸盘阵列,另一侧面用于连接机器人的末端法兰;所述推手机构设置在所述第一吸盘阵列和所述第二吸盘阵列之间,所述推手机构能够沿所述夹具主体的长度方向伸出或缩回,以将目标箱体由所述第一吸盘阵列和第二吸盘阵列上侧推出;所述夹具主体的两侧端设置有支撑板机构,所述支撑板机构能够沿垂直所述夹具主体平面的方向伸出或缩回,用于对所述吸盘阵列吸取的所述目标箱体进行支撑,包括如下步骤:
7.根据权利要求6所述的集装箱内的装箱方法,其特征在于,所述步骤m3包括如下步骤:
8.根据权利要求6所述的集装箱内的装箱方法,其特征在于,所述步骤m4包括如下步骤:
9.一种集装箱内的拆箱方法,通过装卸机器人进行,其特征在于,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,所述夹具主体的一侧面设置有吸盘阵列,所述吸盘阵列包括第一吸盘阵列和第二吸盘阵列,另一侧面用于连接机器人的末端法兰;所述推手机构设置在所述第一吸盘阵列和所述第二吸盘阵列之间,所述推手机构能够沿所述夹具主体的长度方向伸出或缩回,以将目标箱体由所述第一吸盘阵列和第二吸盘阵列上侧推出;所述夹具主体的两侧端设置有支撑板机构,所述支撑板机构能够沿垂直所述夹具主体平面的方向伸出或缩回,用于对所述吸盘阵列吸取的所述目标箱体进行支撑,包括如下步骤:
技术总结
本发明提供了一种集装箱内的装箱方法及拆箱方法,通过装卸机器人进行,其特征在于,所述装卸机器人包括夹具主体、推手机构、支撑板机构以及机械臂,包括如下步骤:控制所述夹具主体吸取目标箱体的一侧面;控制所述机械臂运动,以使所述夹具主体对所述目标箱体的一侧面进行支撑;控制所述推手机构推动所述目标箱体沿所述夹具主体滑动,以将所述目标箱体推送至一目标位置上。本发明能够在将所述目标箱体由所述第一吸盘阵列和第二吸盘阵列上侧推出时实现箱体垛顶层区域的放置箱子,从而在集装箱等限制空间的环境中进行码垛时提高了码垛上限高度。
技术研发人员:魏明哲,周佳骥
受保护的技术使用者:星猿哲科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!